主动后轮转向四轮独立驱动车辆的协调控制
2021-08-24 10:00杨凤举何宗权
江苏大学学报(自然科学版) 2021年5期
付 翔, 杨凤举, 黄 斌, 何宗权, 裴 彪
(1. 武汉理工大学 汽车工程学院, 湖北 武汉430070; 2. 武汉理工大学 现代汽车零部件技术湖北省重点实验室, 湖北 武汉 430070; 3. 武汉理工大学 汽车零部件技术湖北省协同创新中心, 湖北 武汉 430070; 4. 武汉理工大学 湖北省新能源与智能网联车工程技术研究中心, 湖北 武汉 430070)
四轮转向/四轮独立驱动车辆具有四轮转角可调、四轮转矩独立可控的特点,易于实现车辆的主动转向和直接横摆力矩控制等子系统的协调控制.目前针对四轮转向车辆稳定性控制研究,主要集中在主动后轮转向和主动四轮转向2方面.高琳琳等[1]设计了一种由径向基函数神经网络控制器与单神经元自适应PSD(proportional sum differential)控制器组成的主动后轮转向控制系统.谢宪毅等[2]提出一种基于路面附着系数的变权重系数的LQR(linear quadratic regulator)后轮主动转向控制策略.MENG Q. H.等[3]对滑膜控制进行了改进,设计了一种非滑动有限时间收敛控制器用于车辆的主动四轮转向控制.SHI K.等[4]运用对角解耦方法和模型预测控制理论设计了一种双层动态解耦控制的主动四轮转向控制系统.于树友等[5]设计了基于类稳态控制、前馈控制和反馈控制组成的3步法主动四轮转向控制器.四轮转向车辆通过控制车轮转角改变轮胎侧向力可以提高车辆的稳定性,但在极限工况下,当轮胎侧向力达到饱和时,四轮转向控制器便失去了对车辆稳定性的调节能力.因此,需要引入轮胎纵向力的控制来提高四轮转向车辆在极限工况下的稳定性.
目前在四轮转向与直接横摆力矩协调控制的研究方面,很多控制策略主要应用于车辆的稳定性控制.M. DEMIRCI等[6]设计了一种基于拉格朗日神经网络的自适应最优控制器,用于四轮转向与直接横摆力矩的协调控制,直接横摆力矩的分配采用四轮驱/制动力协调分配方式.LI B.等[7]运用滑膜控制理论设计了主动后轮转向与直接横摆力矩的协调控制器,其中直接横摆力矩的分配采用四轮制动力分配方式.YONG J. W.等[8]运用滑膜控制设计了一种四轮转向与直接横摆力矩集成控制算法,同时开发了一种兼具制动助力器和轮缸压力调节的电子助力器(electronic booster)用于集成控制系统设计,直接横摆力矩的分配选用基于规则的单轮制动方式.SONG J.[9]运用模糊控制和滑模控制理论设计了主动后轮转向与直接横摆力矩的协调控制系统,其中直接横摆力矩的分配采用两前轮ABS(anti-lock brake system)制动力分配的方式.HANG P.等[10]设计了一种基于LMI(linear matrix inequality)方法的LPV/H∞控制器,用于四轮转向与直接横摆力矩的协调控制,其中直接横摆力矩的分配采用四轮驱/制动力协调分配方式.大多数四轮转向与直接横摆力矩的协调控制研究,对于提高车辆在极限工况下的稳定性,取得了较好的控制效果,但忽略了四轮转向车辆在高速稳定行驶工况下存在转向灵敏度不足问题.该问题降低了四轮转向车辆在高速工况下的紧急避障能力.因此,需要设计直接横摆力矩控制器通过调节四轮转向车辆的横摆角速度响应,改善四轮转向车辆在高速稳定行驶工况下的转向灵敏度不足问题.
基于以上分析,为了改善四轮转向车辆在高速工况下的转向灵敏度不足问题,并提高四轮转向车辆在低附着路面下的稳定性,笔者设计主动后轮转向与四轮转矩分配的协调控制系统,通过CarSim/Simulink联合仿真平台对所设计的协调控制策略进行仿真验证.
1 车辆动力学模型
为了研究四轮转向车辆的横向稳定性,建立车辆2自由度动力学模型,包括沿y轴的横向运动和围绕z轴的横摆运动.2个前轮、后轮分别等效简化为1个位于车辆纵轴线上的等效前、后轮,构建的单轨车辆模型如图1所示.

图1 车辆2自由度模型
图1中:ωr为横摆角速度;β为质心侧偏角;δf和δr为分别为前、后轮转角;αf和αr分别为前、后轮侧偏角;Fyf和Fyr分别为前、后轮胎的侧向力;a和b分别为车辆质心到前、后轴的距离;L为车辆轴距;v为车辆质心速度;vx和vy分别为车辆质心速度在x轴和y轴上的分量;vf和vr分别为前、后轮心速度;ΔMz为附加横摆力矩.
根据牛顿运动定律,四轮转向车辆线性2自由度模型可表示如下:
(1)
式中:m为整车质量;Iz为整车横摆转动惯量.
根据小角度假设可近似得: cosδf≈1,cosδr≈1,β≈tanβ=vy/vx.
根据轮胎线性化假设,有
(2)
式中:k1和k2分别为前、后轴的轮胎侧偏刚度.
(3)
式中:
2 控制系统设计
2.1 控制系统结构
控制系统由信号输入层、控制决策层、控制分配层和控制执行层4部分组成,如图2所示.

图2 控制系统结构
信号输入层的作用是控制系统输入信号的处理,主要包括驾驶员输入部分和车辆参考模型计算出的期望状态量.控制决策层通过基于规则的协调控制器,根据车辆状态信息进行判断,决策出协调控制指令并发送至控制分配层.控制分配层由各子控制器组成,主要包括主动后轮转向控制器和四轮转矩分配控制器,其中,四轮转矩分配控制器包括直接横摆力矩控制器、车辆纵向速度控制器以及转矩分配器.控制分配层根据控制决策层发出的协调控制指令,协调各子控制器参与控制过程,并将计算出的控制量发送至控制执行层.控制执行层指车辆模型,接收控制分配层计算的控制信号并反馈车辆实际状态信息,最终形成分层协调闭环控制的过程.
2.2 主动后轮转向控制器设计
车辆的轨迹跟踪问题可以用车辆质心侧偏角来描述.当质心侧偏角维持在0°附近时,可以更好地完成对行驶轨迹的预瞄,以及对车辆的姿态进行及时调整.因此,将车辆期望质心侧偏角设定为0°,选择零质心侧偏角为控制目标.设计一种“前馈+反馈”的主动后轮转向控制器,控制器结构如图3所示. 其中:βd为期望质心侧偏角,βd=0°;eβ为质心侧偏角偏差,eβ=β-βd;δr1和δr2分别为后轮转角的前馈、反馈输入量.
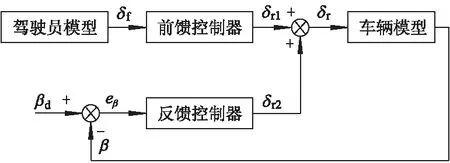
图3 主动后轮转向控制器结构
2.2.1主动后轮转向前馈控制
主动后轮转向前馈控制采用前、后轮转角成比例的控制方法,控制目标是使车辆的稳态质心侧偏角为0°,设前馈后轮转角与前轮转角比例系数为
(4)
(5)
令k=0,则vx=vch,可以求得车辆的特征车速vch;当车速vx
δr1=kδf.
(6)
2.2.2主动后轮转向反馈控制
考虑到车辆行驶过程中可能存在的干扰,如侧向风、轮胎侧偏刚度的变化等,若仅靠比例前馈控制,车辆很难稳定实现期望质心侧偏角为0°的控制目标.因此,基于车辆行驶过程中的质心侧偏角偏差,设计了PID反馈控制器,反馈控制的后轮转角输入量为
(7)
式中:KP1、KI1、KD1分别为主动后轮转向反馈控制器的比例系数、积分系数、微分系数.
因此,后轮转角的总输入量为
δr=δr1+δr2.
(8)
2.3 四轮转矩分配控制器设计
2.3.1直接横摆力矩控制器设计
通常情况下,进行四轮转向时,驾驶员的期望驾驶感受应与前轮转向汽车相同,即在相同前轮转角输入下期望获得与前轮转向车辆相同的横摆角速度响应,四轮转向车辆的稳态横摆角速度可选用相同参数下的前轮转向车辆的稳态横摆角速度值来代替[11].因此,四轮转向车辆的稳态横摆角速度可以表示为
(9)
式中:Gf为前轮转角δf到横摆角速度ωr响应的稳态横摆角速度增益;K为稳定性系数,K=m(a/k2-b/k1)/L2.
为了减小车辆行驶过程中转向盘转角突变对理想横摆角速度的影响,采用一阶惯性环节的形式表示稳态横摆角速度,一阶微分方程的形式为
(10)
式中:τ为一阶惯性环节的时间常数.
考虑到路面附着条件的限制,并预留15%的路面附着裕量,理想横摆角速度为
(11)
式中:μ为路面附着系数;g为重力加速度.
定义横摆角速度跟踪误差为
eω=ωr-ωrd.
(12)
对式(12)求导,考虑参数摄动的影响,并结合式(3)可得
(13)

根据横摆角速度跟踪误差,构建积分滑膜面,滑模面切换函数为

(14)
式中:λ为正值加权系数,取λ=7.
滑模面切换函数s的导数为
(15)

(16)
当系统存在参数摄动时,为了确保系统仍能收敛于滑模面,需要设计鲁棒控制律来保持系统的稳定.所设计的鲁棒控制律为
(17)
式中:kr、kq为指数趋近律的控制系数,取kr=0.1,kq=0.5.
为了验证控制系统闭环稳定性,定义李雅普诺夫函数为
(18)
令f(x,t)=b22d(x,t),对式(18)求导,并结合式(16)、(17)可得
-kr|s|-kqs2+|s||f(x,t)|=
-(kr-|f(x,t)|)|s|-kqs2.
(19)

为了抑制滑膜控制调节过程中出现的抖振问题,定义饱和函数为
(20)
式中:φ为边界层厚度,取φ=0.7.
综上分析,可求得最终附加横摆力矩为
(21)
2.3.2纵向速度控制器设计
纵向速度控制器用于跟踪驾驶员期望车速.根据车辆行驶过程中的期望纵向速度与实际纵向速度的偏差值,设计了速度跟踪PID控制器.用于跟踪期望纵向车速的附加驱动力矩可表示为
(22)
式中:ev为纵向车速偏差;KP2、KI2、KD2分别为速度控制器的比例系数、积分系数、微分系数.
2.3.3车轮转矩分配器设计
车轮转矩的分配思路如下:在附加驱动力矩分配的基础上,对附加横摆力矩进行分配,同时还要考虑附着条件、轮毂电动机外特性的约束.
为了减小ΔTv的分配对ΔMz分配的影响,ΔTv采用四轮平均分配的方式,即
(23)
式中:TBasic为用于保持纵向车速稳定的各车轮的附加转矩.
ΔMz是通过左、右侧车轮之间的驱/制动转矩协调控制实现分配,具体的转矩分配方式为
(24)
式中:Tai为用于实现车辆稳定性控制的各车轮附加转矩,i=1、2、3、4分别为左前、右前、左后、右后车轮位置;Fzi为各车轮的垂向载荷;R为车轮滚动半径;B为车辆轮距.
由式(23)、(24)可得各车轮端的输出转矩:
Twi=TBasic+Tai.
(25)
经过附着条件和轮毂电动机外特性约束后,得
TOi=min(|Twi|,μFziR,|Tmax|ig)sgnTwi,
(26)
式中:TOi为4个车轮端的最终输出转矩;Tmax为轮毂电动机的最大输出转矩;ig为轮毂电动机减速器减速比.
2.4 基于规则的协调控制器设计
2.4.1协调控制目的
在四轮转矩分配控制器中,纵向速度控制器用于保持纵向车速的稳定;直接横摆力矩控制器在必要时用于提高四轮转向车辆的性能.一方面,直接横摆力矩控制器通过调节车辆的横摆角速度响应,改善四轮转向车辆在高速工况下转向灵敏度不足的问题;另一方面,当轮胎的侧向力达到饱和时,四轮转向控制器对车辆稳定性的调节能力有限,此时可通过直接横摆力矩控制器提高车辆的稳定性.
2.4.2协调控制策略
本研究的主动后轮转向控制器(active rear wheel steering,ARS)以质心侧偏角作为控制目标,直接横摆力矩控制器(direct yaw moment control,DYC)以横摆角速度为控制目标,2个子控制器在控制上解耦.考虑到直接横摆力矩控制器的控制目标是横摆角速度,且在必要时才介入工作,因此可通过横摆角速度及其偏差值作为协调控制器控制规则的制定依据.基于以上分析,根据特征车速vch、车辆横摆角速度ωr、ωr的误差绝对值|eω|及设置的4个正值控制阈值e1、e2、e3、e4等参数制定控制规则,如表1所示,其中ωr_th=0.85μg/vx.

表1 协调控制规则
协调控制规则说明如下:
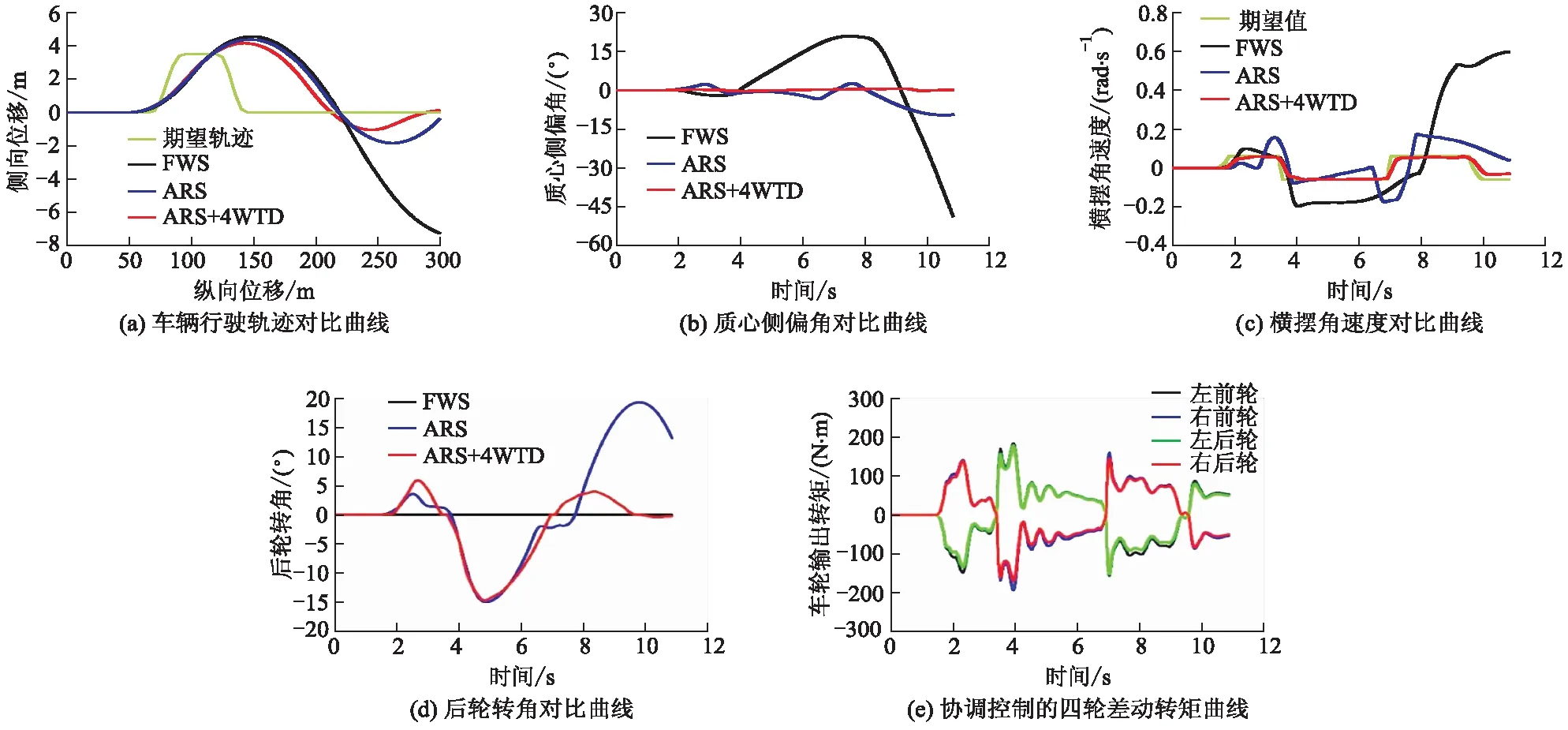
1) 当vx 2) 当vx≥vch时,① 当|ωr|<|ωr_th|、|eω|≤e1时,ARS控制器正常工作,用于改善车辆在中高速工况下的行驶稳定性,DYC控制器不介入工作.② 当|ωr|<|ωr_th|、e1<|eω| 协调控制策略包括协调控制规则和控制量输出函数.协调控制规则是为了划分2个子控制器的工作区间,确定参与车辆控制的子控制器.设置控制量输出函数的目的是消除因不同工作区间的频繁切换引起的控制系统抖振,并通过调节后轮转角δr和附加横摆力矩ΔMz等控制量的输出权重,提高协调控制系统的性能.输出函数的设置如下: 1) 当|ωr|<|ωr_th|时,后轮转角控制量的输出函数为 (27) 式中:ρ1(|eω|)为关于|eω|的单调递减函数,且当e1<|eω| 附加横摆力矩控制量的输出函数为 (28) 此时,控制系统计算的控制量最终输出为 (29) 2) 当|ωr|≥|ωr_th|时,后轮转角控制量的输出函数为 (30) 式中:ρ2(|eω|)为关于|eω|的单调递减函数,且当e3<|eω| 附加横摆力矩控制量的输出函数为 (31) 此时,控制系统计算的控制量最终输出为 (32) 为了验证所提出的协调控制策略的有效性,通过建立CarSim/Simulink联合仿真平台,进行前轮转向(front wheel steering, FWS)车辆、主动后轮转向(ARS)车辆以及协调控制(ARS+4WTD)车辆的对比仿真测试.同时,为了保证仿真过程中车辆纵向速度的稳定,3种控制器均采用相同的纵向速度控制器.仿真主要参数如下:m=5 200 kg;Iz=12 000 kg·m2;a=1.5 m;b=1.7 m;k1=-100 000 N·rad-1;k2=-105 000 N·rad-1;B=2.05 m;R=0.465 m;ig=5;轮毂电动机峰值功率Pmax=90 kW;峰值转矩Tmax=800 N·m;最高转速nmax=3 850 r·min-1. 纵向车速设为120 km·h-1,路面附着系数μ为0.7,在1 s后开始输入前轮转角,前轮正弦转角输入峰值为0.073 rad,周期为4 s,正弦转角输入测试的仿真结果如图4所示.正弦转角输入测试的仿真结果统计如表2所示.其中ymax为车辆行驶轨迹的最大侧向位移. 图4 正弦转角输入测试的仿真结果 表2 正弦转角输入测试的仿真结果统计 从图4a可以看出:在相同的正弦前轮转角输入条件下,ARS控制的车辆产生的侧向位移最小,仅为6.55 m.相比ARS控制的车辆,FWS和ARS+4WTD控制的车辆侧向位移分别提高了102.3%和112.1%,这反映出ARS控制的车辆在高速工况下存在转向灵敏度不足的问题;相比FWS控制的车辆, ARS+4WTD控制的车辆产生了更大的侧向位移,且在完成正弦转向输入后,车辆行驶轨迹能够保持水平,未发生明显偏转. 从图4b可以看出:ARS控制的车辆质心侧偏角的控制效果最好,车辆具有更高的行驶稳定性; ARS+4WTD控制的车辆质心侧偏角相比FWS车辆有一定减小,质心侧偏角正、负向极值分别减小了33.9%和24.8%,提高了车辆的行驶稳定性. 从图4c可以看出:ARS控制的车辆产生的横摆角速度最小,远小于期望值,车辆存在明显的转向不足;FWS车辆的横摆角速度响应的正、负向极值均超过了期望值,车辆出现转向过度的情况,这与FWS车辆的行驶轨迹后期向下偏转对应.ARS+4WTD控制的车辆横摆角速度能以较高精度跟踪期望值,控制效果最好;相比ARS控制的车辆, ARS+4WTD控制的车辆横摆角速度正、负向极值均增加了112.5%.因此,ARS+4WTD控制的车辆,通过ARS与4WTD系统的协调控制,提高了ARS控制的车辆在高速工况下的转向灵敏度. ARS+4WTD控制的车辆后轮转角和四轮差动转矩变化如图4d、e所示,后轮转角控制量小于ARS控制的车辆,四轮差动转矩控制量变化情况较为合理. 选取双移线工况,纵向车速设为100 km·h-1,路面附着系数μ为0.2,低附着路面测试的仿真结果如图5所示.低附着路面测试的仿真结果统计如表3所示.其中y为车辆行驶轨迹的侧向位移. 图5 低附着路面测试的仿真结果 表3 低附着路面测试的仿真结果统计 从图5a可以看出:从期望轨迹的跟踪效果来看,FWS车辆的行驶轨迹在轨迹跟踪后期出现了较大偏差,车辆完全偏离了期望轨迹.ARS和ARS+4WTD控制的车辆在完成双移线操作后均能够实现回正.其中,ARS控制的车辆在轨迹跟踪后期也存在失稳风险,行驶轨迹的负向极值达到了1.84 m.ARS+4WTD控制的车辆在完成双移线操作后能够更早地实现回正,且行驶轨迹正、负向极值均为最小,其中行驶轨迹的负向极值为1.04 m,相比ARS车辆减小了43.5%.因此, ARS+4WTD控制的车辆在低附着路面下具有更好的轨迹跟踪效果. 从图5b可以看出: FWS车辆的质心侧偏角在轨迹跟踪后期出现了较大的正、负向极值,这与FWS车辆的行驶轨迹严重偏离期望轨迹相对应.相比FWS车辆,ARS和ARS+4WTD控制的车辆均能将质心侧偏角控制在较小的范围内.ARS控制的车辆在完成双移线操作后质心侧偏角负向极值达到了9.61°,车辆存在失稳风险.ARS+4WTD控制的车辆具有更好的质心侧偏角控制效果,质心侧偏角保持在零值附近的较小范围内,车辆具有更高的行驶稳定性. 从图5c可以看出:FWS车辆在完成双移线操作后出现了较大的横摆角速度波动,完全偏离了期望值,车辆已经失稳.ARS控制的车辆的横摆角速度的正、负向极值均超过了期望值,且出现了一定程度的波动.ARS+4WTD控制的车辆横摆角速度能以较高精度跟踪期望值,控制效果最好,相比ARS控制的车辆,横摆角速度的正、负向极值均减小了64.7%. 从图5d可以看出:ARS控制的车辆在完成双移线操作后,后轮转角控制量仍存在较大的正向极值,说明此时车辆存在失稳风险.而ARS+4WTD控制的车辆在完成双移线操作后轮转角控制量逐渐减小至零值附近,车辆处于稳定状态.ARS+4WTD控制的车辆四轮差动转矩变化如图5e所示,与后轮转角控制量共同保证车辆的行驶稳定性. 因此, ARS+4WTD控制的车辆,通过ARS与4WTD系统的协调控制,提高了ARS控制的车辆在低附着路面下的行驶稳定性. 1) 在正弦转角输入测试中,相比仅主动后轮转向控制车辆,协调控制车辆的横摆角速度的正、负向极值均提高了112.5%,能够改善仅主动后轮转向控制车辆在高速工况下存在的转向灵敏度不足的问题,提高车辆的紧急避障能力. 2) 在低附着路面测试中,相比仅主动后轮转向控制车辆,协调控制车辆的横摆角速度的正、负向极值均减小了64.7%,且质心侧偏角始终保持在零值附近,所提出的协调控制系统可以增强车辆在低附着路面下的稳定性.3 仿真验证
3.1 仿真设计
3.2 正弦转角输入测试


3.3 低附着路面测试

4 结 论
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06民用飞机设计与研究(2020年4期)2021-01-21新课程·中学(2019年7期)2019-09-17小学生学习指导·爆笑校园(2019年6期)2019-09-10物理教学探讨(2018年1期)2018-02-13自动化学报(2017年4期)2017-06-15红蜻蜓·低年级(2015年11期)2016-02-02汽车文摘(2015年3期)2015-12-11中国塑料(2015年3期)2015-11-27空间控制技术与应用(2015年2期)2015-06-05