纯电动汽车坡道行驶驱动转矩优化控制策略
2021-08-24 10:00张金成王良模邹小俊
江苏大学学报(自然科学版) 2021年5期
张金成, 王 陶, 王良模, 邹小俊, 宋 伟
(1. 南京理工大学 机械工程学院, 江苏 南京 210094; 2. 南京依维柯汽车有限公司, 江苏 南京 211800)
电动汽车已经成为汽车工业重要的发展方向,电动机相比发动机具有更好的转矩响应能力.良好的驱动转矩控制策略能够充分发挥电动机转矩响应快的特点,使车辆在起步、坡道行驶、加速过程中有更出色的性能表现[1].转矩需求解析策略是根据车辆的运行工况和驾驶员的行驶意图,向电动机控制器输出相应的需求转矩信号,最终由电动机输出给车辆,以确保车辆按照驾驶员意图安全行驶[2].CHENG A. Y.等[3]针对微型纯电动车的爬坡性能提出了一种基于新的模糊控制、总转矩指令以及相应MAP的车辆行驶控制策略,以改善车辆的动力性能.宋强等[4]综合考虑了电动汽车以不同车速加速时对驱动转矩的需求,对基础转矩增加了转矩补偿控制策略,考虑加速时车速的影响因素,但并没有考虑到道路情况的影响.秦大同等[5]在进行转矩补偿时采用动态补偿转矩保持和动态补偿转矩归零等算法计算动态补偿转矩,可根据驾驶员动态意图提高车辆的动力性.
笔者为了解决车辆在上坡行驶过程中的转矩不足和下坡行驶能量回收问题,提出一种模糊控制算法与坡度识别算法相结合的坡道行驶优化转矩控制策略.首先基于线性稳定的转矩控制策略(简称基准转矩控制策略),求得当前工况下的驱动转矩,再设计一种以加速踏板变化率和道路坡度为输入的模糊控制算法,求得车辆补偿转矩的优化转矩控制策略.在Matlab/Simulink中建立车辆模型和控制算法模型进行仿真分析.
1 基准转矩控制策略
1.1 车辆动力学模型
纯电动汽车在正常行驶过程中的驱动力Ft主要是电动机转矩经过传动系统传递到车轮上,与此同时,还需要克服滚动阻力Ff、空气阻力Fw、坡道阻力Fi和加速阻力Fj.纯电动汽车的动力学表达式为
Ft=Ff+Fw+Fi+Fj.
(1)
可以推导出:
(2)
式中:Tm为电动机转矩;ig为两挡变速器传动比;i0为主减速器传动比;η为传动效率;r为车轮滚动半径;m为车辆质量;g为重力加速度;f为滚动摩擦系数;α为坡度角;CD为风阻系数;A为迎风面积;ua为车速;δ为车辆旋转质量转换系数;du/dt为车辆行驶加速度.
1.2 转矩需求解析
车辆在行驶过程中,整车控制器中的控制策略会根据接收信号做出判断,对当前车辆的行驶工况进行识别并进行转矩需求解析,车辆的需求转矩Tq与电动机特性和加速踏板开度的关系为
Tq=Tmin+Lt(Tmax-Tmin)-TBrk,
(3)
式中:Tmin为车辆保持当前工况下安全行驶所需的最小转矩,可由式(2)求出;Tmax为电动机所能提供的最大驱动力矩,由电动机外特性曲线决定;Lt为转矩负荷系数,为兼顾车辆的动力性和经济性,这里的转矩负荷系数与踏板开度呈线性关系,Lt=θk,θk为踏板开度;TBrk为制动力转矩.
根据电动机的外特性曲线可知:当电动机转速小于额定转速时,电动机处于恒转矩阶段;当电动机转速大于额定转速时,电动机处于恒功率阶段,所以电动机的最大转矩为
(4)
式中:Tpeak为电动机峰值转矩;Ppeak为电动机峰值功率;nm为电动机实时转速;ne为电动机额定转速.
根据转矩负荷系数和电动机外特性(见图1)可以确定电动机基准转矩MAP图,控制策略中可以采用查表法计算出基准转矩值.

图1 电动机外特性图
2 优化转矩控制策略
驱动控制策略中制定的加速踏板解析是转矩负荷系数与加速踏板开度呈线性关系,这样可以兼顾车辆的动力性与经济性,但是无法满足复杂工况下的转矩需求.在急加速或者上坡的情况下,需要电动机提供更大的转矩以满足车辆的动力性需求,线性的转矩负荷系数无法满足及时响应驾驶意图的需求.
为了解决车辆在坡道行驶过程中的转矩优化问题,提出了一种基于模糊控制算法的坡道行驶优化转矩控制策略.基于制定的线性稳定的基准转矩控制策略求得当前工况下的基准转矩,设计一种以加速踏板变化率和道路坡度为输入的模糊控制算法求得车辆当前工况下的补偿转矩,弥补车辆在坡道行驶过程中的转矩不足问题,提高车辆行驶的动力性能,同时能够及时识别和响应驾驶员的驾驶意图,降低驾驶负担.
2.1 转矩补偿分析
补偿转矩会引起电动机转矩的突变,从而影响车辆的舒适性,冲击度可以用来评价车辆的舒适性,所以确定补偿转矩最大值时需要考虑冲击度的影响,冲击度j定义为车辆加速度的变化率,即
(5)
式中:a为车辆加速度;t为采样周期,一般取20 ms;ηT为传动效率; dT为电动机响应周期内的转矩变化值.
(6)
式中:i为传动系统总传动比.
根据德国冲击度限制标准规定:j≤10 m·s-3[6],所以补偿转矩的最大值应为
(7)
将车辆参数代入计算可得Tcp≤15.64 N·m,因此限制补偿转矩的最大值为15 N·m.
2.2 坡度识别算法原理
部分车辆的坡度识别是通过安装倾角传感器进行的,但是由于车辆在行驶过程中车身的俯仰运动等因素的影响,使得识别的坡度存在较大的误差和波动,所以采用一种基于纵向动力学的坡度识别算法.
由式(2)可得
(8)
式中:G为车辆重力.
可以推导出坡度识别算法中的识别加速度为
(9)
式中:αc为坡道识别算法中的识别坡度.
车辆的实际加速度为
(10)
式中:Vk和Vk-1分别为当前时刻和上一时刻通过采集自CAN总线中的车速信号;Δt为采样周期;αr为道路的实际坡度.
由识别坡度αc和实际坡度αr通过式(9)和(10)可以分别计算识别加速度ac和实际加速度ar.不同的识别坡度与实际坡度的关系对应不同的识别加速度与实际加速度关系,即
运用Stata软件用极大似然法估计Logistic模型的系数,得到表格3.3所示的结果。从回归结果来看,商业周期、成长机会和股权集中度的系数较为显著,其他因素的系数不显著。其中,商业周期、成长机会与现金支付的可能性呈负相关,而股权集中度会增加收购方现金支付的可能性。
(11)
所以通过比较识别加速度ac和车辆实际加速度ar的关系,可以判断识别坡度αc和实际坡度αr的关系.在每一个坡度识别周期内,根据比较识别加速度ac和车辆实际加速度ar的关系,对识别坡度αc进行修正可得
(12)
式中:αck和αck-1分别为当前时刻和上一时刻的识别坡度;Δα为坡度修正系数.
可以通过修改坡度修正系数改变坡度的识别速度,但是过大的坡度修正系数容易造成识别过程中坡度的震荡,无法收敛至实际坡度,根据仿真结果数据对比发现,Δα取2%时识别坡度与实际坡度的误差最小,所以在坡道识别算法中Δα的取值为2%.坡道识别算法架构如图2所示.

图2 坡度识别算法架构
2.3 坡度识别算法仿真分析
通过采集车辆实际行驶道路的GPS(global positioning system)信号获得该段道路的坐标信息,可计算得到采集路段的道路坡度信息如图3所示.

图3 道路坡度信息
以实际采集的道路坡度信息为基础进行道路扩展,在Simulink中建立车辆模型与坡度识别算法仿真模型,对坡度识别算法进行仿真,识别坡度与实际坡度对比如图4所示.
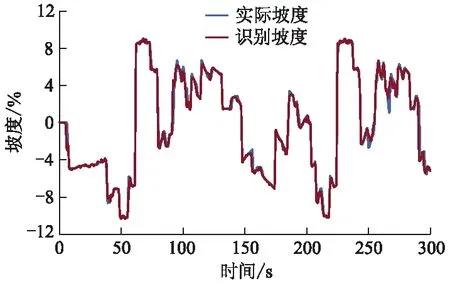
图4 识别坡度与实际坡度对比图
从图4可以看出: 该坡度识别算法可以快速,且较为准确地识别车辆所处道路的坡度信息,识别的坡度与实际坡度基本相同,只有在坡度突变的地方识别精度有些误差,但对控制策略的仿真结果不会造成太大的影响.
2.4 模糊控制算法
优化转矩控制策略中补偿转矩的大小由反映驾驶意图的踏板开度变化率和影响车速的坡度大小共同决定,而踏板开度变化率、坡度大小与补偿转矩大小之间并不能用具体的数学函数来表达,对于这种不明确的变量关系通常采用模糊控制理论来进行研究[7].模糊控制器内部的控制和决策方法可以模拟人类的思维,不需要准确的数学模型,并且具有很强的鲁棒性[8].
模糊控制器的输入参数为踏板开度变化率和坡度,输出为补偿转矩的大小.踏板开度变化率的范围为-100~100 %·s-1,论域为[-100,100],模糊子集为{负大、负中、负小、0、正小、正中、正大},表示为{NB、NM、NS、O、PS、PM、PB},隶属度函数如图5所示.
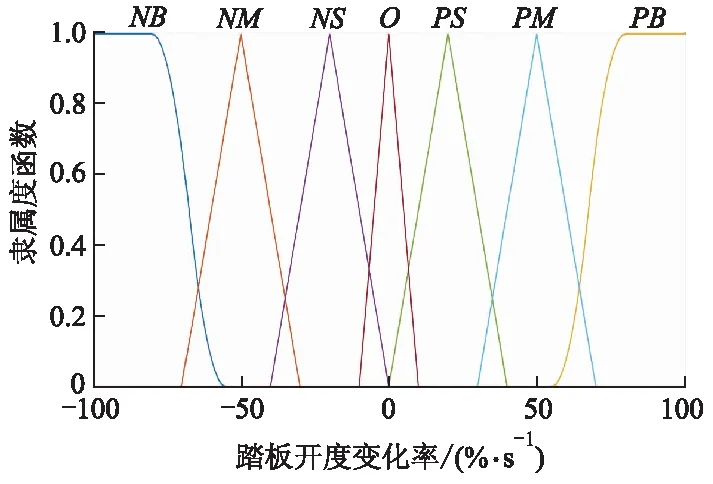
图5 踏板开度变化率的隶属度函数

图6 坡度的隶属度函数
输出量为转矩的补偿值,考虑到冲击度和驾驶员操作稳定性的影响,取补偿转矩的范围为-15~15 N·m,其论域为[-15,15],模糊子集为{负大、负中、负小、0、正小、正中、正大},表示为{NB、NM、NS、O、PS、PM、PB}.输入输出的隶属度函数采用三角形,隶属度函数如图7所示.
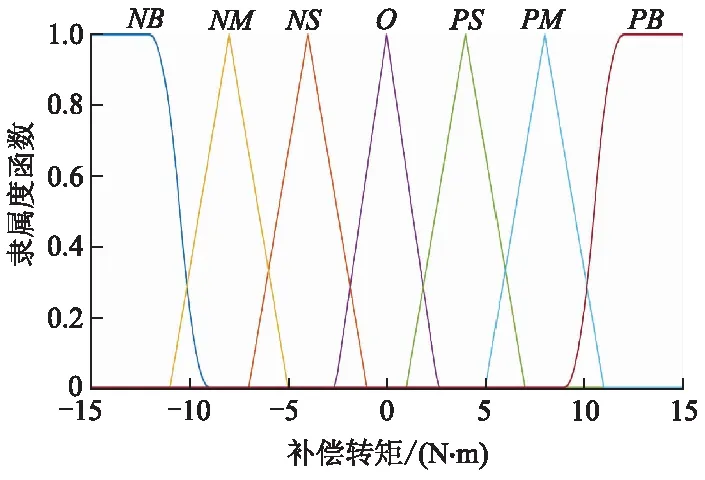
图7 补偿转矩的隶属度函数
模糊规则是模糊控制器进行模糊推理的重要依据[9],模糊规则的作用是根据模糊控制器的输入做出相应的决策,并输出补偿转矩值.当输入踏板开度变化率较小时,可以初步判断出驾驶员的驾驶意图是保持当前车速行驶或缓慢变化车速,若此时坡度较大且为上坡,说明应当提供一个适当的补偿转矩以克服坡道对车速的影响.依此方法,制定出所有情况下的模糊推理规则如表1所示.模糊推理规则曲面如图8所示.
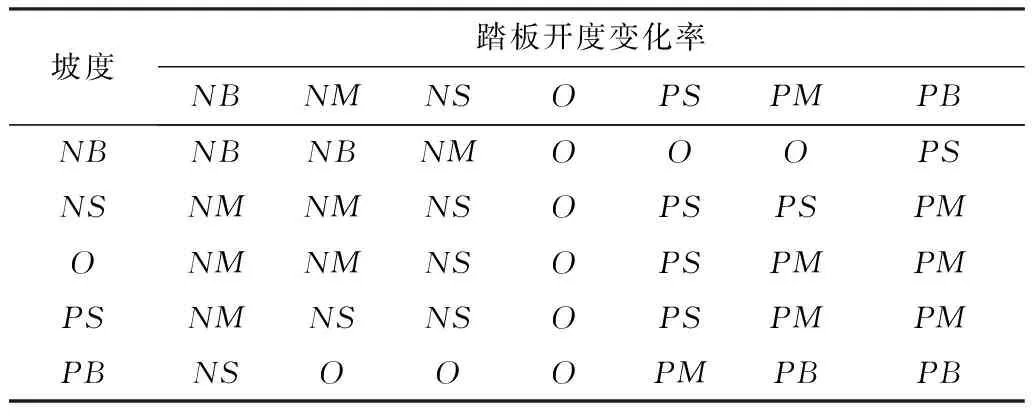
表1 模糊控制规则表

图8 模糊控制规则曲面
2.5 优化转矩控制策略架构
根据基准转矩和模糊控制补偿转矩建立转矩优化控制策略,策略架构如图9所示.
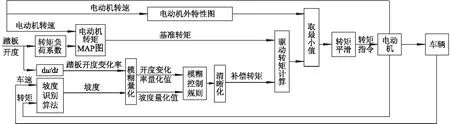
图9 优化转矩控制策略架构图
从图9可以看出: 根据车辆传感器的信号,由基准转矩控制策略求出当前工况下的基准转矩,转矩补偿采用模糊控制推理方法,由车辆的踏板开度变化率和道路坡度输入信号推理计算出补偿转矩值.这里的实时坡道信息采用一种坡道识别算法求出,该算法采用车辆纵向动力学方程定义一个识别加速度,再与由车速传感器测得的车速信号计算得出的加速度信号进行不断地修正,此时识别坡道将收敛至实际坡度.车辆的需求转矩由基准转矩加上补偿转矩值,但需要考虑电动机最大转矩的限制,需求转矩不能超出电动机所能提供的最大转矩[10].
3 优化转矩控制策略仿真验证
为了验证优化转矩控制策略的有效性,并对其进行优化转矩控制策略仿真分析,选用的车型为某纯电动轻型客车,车辆整备质量为3 650 kg,满载质量为5 100 kg,迎风面积为4.7 m2,风阻系数为0.43,车轮滚动半径为0.364 m,滚动阻力系数为0.018,主减速比为4.75,1挡减速比为3.520,2挡减速比为1.723,电动机峰值功率为100 kW,峰值转速为7 000 r·min-1,电动机峰值转矩为350 N·m.
3.1 仿真工况
在Matlab/Simulink中建立车辆模型和控制策略模型进行仿真分析,仿真工况中采用NEDC(new European driving cycle)市郊工况,考虑到开发车型为纯电动轻型客车,该车辆最高车速设计目标为100 km·h-1,所以采用NEDC_man_90郊区工况作为仿真工况,车速工况如图10所示.仿真道路信息为采集的真实道路信息.模糊控制器中的坡度输入信号为坡度识别算法识别出的实时坡度信号.

图10 NEDC_man_90郊区工况
3.2 仿真结果分析
为观察转矩优化控制策略的优化效果,采用基准转矩控制策略和优化转矩控制策略在同一个仿真工况下的驱动转矩进行对比,驱动转矩对比如图11所示,转矩补偿如图12所示.

图11 驱动转矩对比
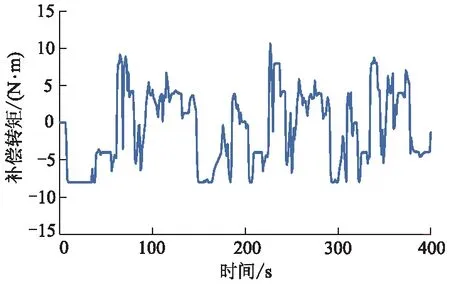
图12 转矩补偿
驱动力转矩数值统计如表2所示,在整个行驶工况下,优化转矩控制策略在车辆加速的过程中会给车辆提供正向补偿转矩以提高车辆的动力性,在减速过程中会提供反向的制动力矩以降低车速,与此同时,能够增加能量回收效率,结合道路坡度和车速分析,当车辆处于上坡且车速上升阶段时,补偿较大正向转矩以增加车辆的爬坡性能和加速性能.车辆处于上坡且车速变化不大时,补偿适中的正向转矩以增加车辆的爬坡性能,克服坡度对车速的影响.当车辆处于下坡且车速变化不大时,补偿适中的负向转矩,克服坡度对车速的影响,并且能够增大能量回收效率,提高车辆的经济性.
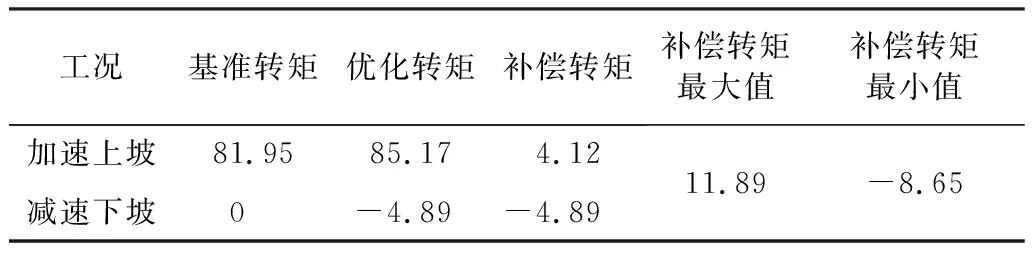
表2 驱动力转矩数值统计表 N·m
从表2可以看出: 在整个行驶仿真过程中,补偿转矩最大值为11.89 N·m,最小值为-8.65 N·m;在车辆上坡加速过程中补偿转矩平均值为4.12 N·m,优化转矩平均值为85.17 N·m,比基准转矩提高了3.93%.在车辆减速下坡过程中由于加速踏板位移为0,所以基准转矩为0,且此时车辆处于减速状态,表2中的转矩均为驱动力转矩,所以在下坡减速过程中电动机的实际转矩应为制动力转矩加上表2中的驱动力优化转矩,在减速下坡过程中的补偿转矩平均值为-4.89 N·m,可用于制动能量回收,提高能量利用效率.对仿真结果分析可知:优化转矩控制策略能够提高车辆在加速和上坡过程中的动力性能,在减速和下坡过程中能够增加制动能量回收效率,提高经济性能.
3.3 上坡加速性能分析
为了进一步验证优化转矩控制策略的有效性,对车辆处于上坡加速工况下的动力性能进行仿真分析,对比基准转矩控制策略和优化转矩控制策略下的车速情况.仿真道路是恒定坡度4%的连续上坡道路,仿真工况设置加速踏板开度在0~5 s内由0匀速踩到80%后保持不变,踏板开度随时间的变化曲线如图13所示.基准转矩控制策略和优化转矩控制策略下的车速对比情况如图14所示.2种控制策略加速时间仿真结果对比如表3所示.

图13 踏板开度随时间的变化曲线

图14 上坡加速性能对比

表3 2种控制策略加速时间对比表s
由表3可以看出:优化转矩控制策略在车速为0~50 km·h-1时,上坡加速时间为10.65 s,比基准转矩控制策略降低了11.62%;车速为50~80 km·h-1时,上坡加速时间为8.60 s,比基准转矩控制策略降低了14.85%;采用模糊控制的优化转矩控制策略对驾驶员的驾驶意图有更好的识别响应能力,能够有效提高车辆加速和爬坡性能.
4 结 论
针对纯电动车汽车坡道行驶过程中转矩需求控制问题提出了基于模糊控制的优化转矩控制策略和坡度识别算法,建立了Matlab/Simulink仿真模型,采用NEDC_man_90郊区工况进行仿真.车辆在上坡和加速过程中的补偿转矩平均值为4.12 N·m,优化转矩控制策略的驱动转矩比基准转矩控制策略提高了3.93%;当车辆处于减速和下坡时,平均补偿转矩为-4.89 N·m,增加了制动能量回收效率,提高了车辆经济性能.采用4%的坡道工况对车辆上坡加速性能进行仿真,踏板开度在0~5 s内由0匀速踩到80%,对比2种控制策略下的车速,得出优化转矩控制策略.车速为0~50 km·h-1的上坡加速时间为10.65 s,比基准转矩控制策略降低了11.62%,车速为50~80 km·h-1的上坡加速时间为8.60 s,比基准转矩控制策略降低了14.85%.结果表明:该优化转矩控制策略能够有效识别驾驶员的驾驶意图,提高车辆的动力性和经济性.
猜你喜欢
防爆电机(2022年2期)2022-04-26
城市道桥与防洪(2019年5期)2019-06-26
中国特种设备安全(2018年11期)2019-01-08
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
电气化铁道(2016年4期)2016-04-16
通信电源技术(2016年1期)2016-04-16
微特电机(2015年1期)2015-07-09
医学研究杂志(2015年4期)2015-06-10