基于模糊神经网络的茶园拖拉机远程故障诊断系统
2021-08-24 10:00马志怡盘朝奉
江苏大学学报(自然科学版) 2021年5期
梁 军, 马志怡, 盘朝奉, 陈 龙
(江苏大学 汽车工程研究院, 江苏 镇江 212013)
茶园拖拉机亦称“茶园耕作机”,是用于茶园耕作管理的机械,在达到一定工作时长后故障率[1]较高.随着互联网技术的迅速发展,现代制造模式正朝着集成化、网络化、全球化方向发展,涌现出智能制造、网络化分散制造等先进制造理念.以互联网为载体的茶园拖拉机远程故障诊断[2-3]系统,可以让人们更快地知道茶园拖拉机所发生的故障,在短时间内处理掉故障.远程故障诊断[4-6]系统的优势在于可以实时得到被监控对象的工作信息,保证对监控对象信息的掌握,可提前判断被监控对象可能会出现的问题.另外,当被监控对象已经出现问题时,根据已经得到的信息,可以快速得到出问题的部位和原因,从而在短时间内给出相应的处理方法,节约了故障处理的时间,间接提高了生产效率.对于尚处在茶园拖拉机起步阶段的中国来说,更快地得到机器的故障,可以更快地修改产品中的不完善,具有较大的实用意义与市场价值.
目前,针对远程监控系统,国内外高校和研究机构都展开了积极的研究[7-10].但这些系统并不完善,仍然存在信息采集困难、系统维护困难以及对于信息的判断时间跟不上被监控对象变化的节奏等许多问题.针对上述不足,文中提出基于模糊神经网络的茶园拖拉机远程故障诊断系统及方法,通过对茶园拖拉机的实时监控,达到检测茶园拖拉机是否正常工作的目的,提高茶园管理工作的效率与质量.
1 茶园拖拉机RFDS分析
1.1 RFDS功能分析
RFDS作为一种故障诊断方法,要求可以掌握被监控对象的运行状况,并且掌握被监控对象正常的参数,能根据参数的变化,对被监控对象做出正确的运行状况判断,所以该远程故障系统应具有以下功能:① 实时采集被监控对象的运行参数;② 实时提供被监控对象运行时应该具有的正常参数;③ 对传感器采集到的信息进行实时分析,判断出被监控对象可能出现的问题.
1.2 茶园拖拉机故障特点分析
茶园拖拉机作为茶园耕作管理的主要农业装备,工作期间可完成耕地、除草、开沟、起垄、施肥和播种等作业步骤.其功能多,机械结构繁多,达到一定工作时长后故障率[11]升高,主要故障类型如下:① 因不规范操作导致堵塞故障,这是人为因素,可根据操作员的丰富经验避免此类故障;② 长时间的使用导致联合收割机某些部件出现过度磨损导致的突发性故障,属于自然磨损,依据于机器本身属性,是非人为因素,难以避免;③ 作物杆茎或杂草混入转动部件引起的堵塞故障.
2 茶园拖拉机RFDS结构设计
远程监控诊断系统主要包括信息采集模块、信息编码传输模块以及信息处理模块三大模块,如图1所示.
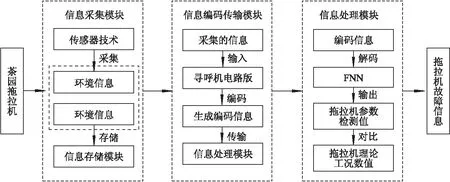
图1 系统总体结构图
系统首先通过信息采集模块对拖拉机进行实时信息采集,包括环境信息和拖拉机自身信息;然后信息编码传输模块将采集到的信息进行编码处理,并通过无线局域网络发回远程监控中心的计算机,最后由监控中心对得到的信息进行分析处理,判断拖拉机是否处于正常工况,并及时将故障状况通过屏幕显示.
2.1 信息采集模块
信息采集模块包括环境信息采集模块和拖拉机信息采集模块,各模块中的传感器实时采集茶园拖拉机工作时候的各种数据,并将其存储在信息存储模块中.信息采集模块结构如图2所示.

图2 信息采集模块结构图
环境信息采集模块包括道路坡度信息采集模块、环境温度信息采集模块以及风速信息采集模块.道路坡度信息采集模块为一个传感器单元,传感器单元为一个水平仪;环境温度信息采集模块为一个传感器单元,传感器单元为一个温度传感器;风速信息采集模块为一个传感器单元,传感器单元为一个恒温风速仪.拖拉机信息采集模块包括柴油发动机信息采集模块、传动系信息采集模块、制动系信息采集模块、转向系信息采集模块以及液压系统信息采集模块.柴油发动机信息采集模块包括信息采集单元,信息采集单元为一个转速传感器,一个齿杆位移传感器以及一个油门位置传感器,转速传感器检测发动机飞轮转速.传动系信息采集模块包括信息采集单元,信息采集单元为一个转速传感器和一个加速度传感器,转速传感器检测传动轴转速,加速度传感器检测传动轴加速度.制动系信息采集模块包括信息采集单元,信息采集单元为一个位移传感器,位移传感器安放在制动系的促动机构中.转向系信息采集模块包括信息采集单元,信息采集单元为一个转速传感器和一个加速度传感器,转速传感器检测油泵转速,加速度传感器检测转向节的加速度.液压系统信息采集模块包括信息采集单元,信息采集单元包括一个压力传感器,一个热电偶传感器以及一个液位传感器.
2.2 信息编码传输模块
信息编码传输模块包括信息编码模块和信息传输模块两大模块.信息编码模块由寻呼机电路板组成,用于将采集到的信息用编码器以一定的编码方式编发,方便传输,编码方式为POCSAG编码.信息传输模块由无线局域网络组成,用于将编码后的信息通过网络发送到监控中心的信息处理模块.
搭建无线局域网络所需要的硬件设施如下:① 无线网卡.无线网卡是无线局域网络的接口,它的作用类似于有线网络中的以太网卡,可以实现用户和主机之间的信息交换.② 无线AP.AP是Access Point的简称,无线AP是无线局域网的接入点、无线网关,它和有线网络中的集线器作用相同.③ 无线天线.无线天线是一种可以对接收到的信号进行增强的设备,当用户和无线终端距离较远时,无线信号变弱,会影响无线传输的效率,这个时候就需要用无线天线来对信号进行增强,达到可以正常使用的目的.
2.3 信息处理模块
信息处理模块包括信息接收模块、信息解码模块、信息分析模块以及信息显示模块.信息处理模块结构如图3所示.信息接收模块通过无线局域网络接收无线网络传输过来的编码信息,由无线信号接收器组成;信息解码模块由单片机实现,用于对接收的编码信息进行解码处理;信息分析模块由装有Carsim的计算机组成[12],采用具有高普适性、推理性、强拟合性模糊算法与神经网络算法结合组成的模糊神经网络算法对解码后的拖拉机参数检测值和理论值相对比,诊断拖拉机是否存在故障,包括构建动态拖拉机理论工况数据库以及信息计算处理2个步骤;信息显示模块由一块LED屏幕组成,用于显示拖拉机的故障信息.
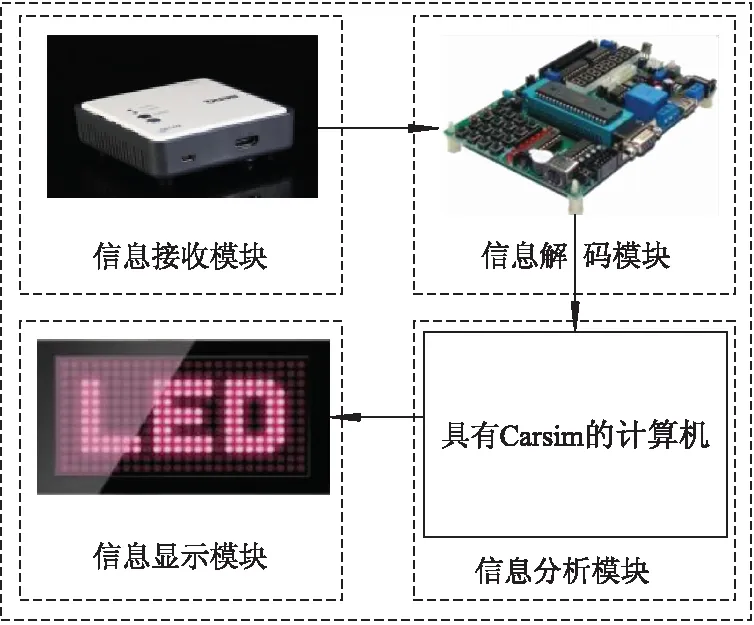
图3 信息处理模块结构图
信息解码模块核心为单片机,它是由CPU、RAM、ROM、定时器/计时器、I/O接口以及中断等组成.考虑到茶园拖拉机本身的因素以及需在野外运行,采集土壤温湿度时选用型号为 AT89C52 的单片机.
信息分析模块包括以下2个部分:
1) 构建动态拖拉机理论工况数据库.装有Carsim的计算机接收解码器发送来的环境信息,并将其录入到Carsim中,由Carsim建立相应的模拟环境、同时将现实拖拉机型号输入计算机,建立拖拉机动力学模型[13],得到拖拉机理论工况,计算机根据接收来的环境信息动态更新模拟环境,实时更新拖拉机理论工况数据库,为采集到的实际工况数据提供对比数据.
2) 信息计算处理.主要有对比法和模糊神经网络算法.对比法为实际工况数据N2i与理论工况数据N1i的差距为Δi,其中i为所监控参数的代号,i=1,2,…,11.i=1表示柴油发动机转速,i=2表示齿杆的位移,i=3表示油门位置,i=4表示传动系传动轴转速,i=5表示传动系传动轴加速度,i=6表示制动系促动机构的位移,i=7表示转向系油泵转速,i=8表示转向系万向节的加速度,i=9表示液压系统的油液压力,i=10表示液压系统的油液温度,i=11表示液压系统的油液位置.则有
(1)
式(1)表示当编号为i的某结构实际工况数据,当Δi≤βi时,则称该实际工况数据与理论工况数据相符合,否则处于异常工况.根据i所对应的监控参数,可以得到出问题的机构.所述βi为i所对应参数的规定差距允许范围,为一常数.文中拟采用模糊神经网络算法进行故障诊断[14].
3 算法设计
人工神经网络[15]是并行分布式系统,采用分布式存贮和并行处理的方式,具有自适应、自组织和实时学习的特点,有极强的容错性、健壮性和大规模并行处理能力,但是不善于对知识进行表达;模糊逻辑[16]利用人有效的经验来进行逻辑推理及泛化思维,能对故障症状及原因之间的模糊关系进行准确描述,但是对知识的获取能力较差.因此,文中的故障诊断算法采用两者结合的FNN算法,它不仅具有很强的直接处理数据的自学习能力,而且具有很强的结构化知识表达能力.模糊神经网络的一般结构如图4所示.

图4 模糊神经网络框架结构图
文中FNN算法实现如下:
拖拉机理论工况数据建立过程:具有Carsim的计算机接收解码器发送来的环境信息,并将其录入到Carsim中,由Carsim建立相应的模拟环境;将所监控的拖拉机的额定数据输入Carsim,由Carsim根据所建立的模拟环境,建立所监控拖拉机在该环境下的动力学模型,得到拖拉机理论工况数据库.
2) 构建模糊规则表和模糊化处理函数.模糊化处理是将模糊神经网络系统输入变量映射到模糊集合.首先将参数αi和参数βi的基本论域量化为[-3,3],离散成7个等级,即[-3,-2,-1,0,1,2,3];然后建立7×7规则表,如表1所示,NB表示负大、PB表示正大、NM表示负中、PM表示正中、NS表示负小、PS表示正小、ZO表示零.

表1 模糊规则表
采用等分三角形处理函数对αi进行模糊化.建立数组es[i],用来存储对αi模糊化后的值,总共求7次,其中i∈[0,1,…,6],i值不同时a、b、c取值不同:
es[0]=(αi-a)∕(b-a),a=-3,b=-2;
es[1]=(αi-a)∕(b-a),a=-3,b=-1;
es[2]=(αi-a)∕(b-a),a=-2,b=-1;
es[3]=(c-αi)∕(c-b),a=-1,b=0,c=1;
es[4]=(c-αi)∕(c-b),a=0,b=1,c=2;
es[5]=(c-αi)/(c-b),a=1,b=2,c=3;
es[6]=(c-αi)/(c-b),a=2,b=2.5,c=3.
采用等分三角形处理函数对βi进行模糊化.建立数组ecs[j],用来存储对βi模糊化后的值,总共求7次,其j∈[0,1,…,6],j值不同时a、b、c取值不同:
ecs[0]=(βi-a)∕(b-a),a=-3,b=-2;
ecs[1]=βi-a/b-a,a=-3,b=-1;
ecs[2]=(βi-a)∕(b-a),a=-2,b=-1;
ecs[3]=(c-βi)∕(c-b),a=-2,b=0,c=1;
ecs[4]=(c-βi)∕(c-b),a=-1,b=0,c=2;
ecs[5]=(c-βi)∕(c-b),a=0,b=1,c=2;
ecs[6]=(c-βi)∕(c-b),a=1,b=2,c=3.
3)使用极大-极小算法进行模糊推理.通过求交集遍历es[i]、ecs[j]得出其中较小的隶属度lsd,规则的可信度通过取小运算得到,即从j=0开始依次把es[i]与ecs[j]依次比较,将较小的值存入对应form[i][j]中;再找出规则表中最大的form[i][j]数值,记住此时的i、j,然后根据定制的模糊规则表,按照第i+1行第j+1列找到位置,把此位置点记为kp,根据kp对a、b、c赋予不同的值.如下:
如果kp=NB,a=-3,b=-2,c=-1;
如果kp=NM,a=-3,b=-2,c=0;
如果kp=NS,a=-3,b=-1,c=1;
如果kp=ZO,a=-2,b=0,c=2;
如果kp=PS,a=-1,b=1,c=3;
如果kp=PM,a=0,b=2,c=3;
如果kp=PB,a=1,b=2,c=3.
4) 反模糊化.根据规则表中的位置,进行反模糊化,采取三角形反模糊化处理函数z=(b-a)*lsd+a;y=c-(c-b)*lsd;其中,lsd表示隶属度.
5) 输出结果分类.计算输出故障诊断参数δi,根据δi=(y+z)∕2求出诊断参数δi,并依据δi值得出如下诊断结果:
(2)
式中:δi代表诊断系统输出对应(神经元节点)部件的诊断结果.
4 试验验证
4.1 试验设置
采用Carsim-MATLAB联合仿真平台,建立基于模糊神经网络的茶园拖拉机远程故障诊断系统模型,选取500组正常工作状态时的数据,400组异常数据,其中,随机抽取250组正样本和200组负样本进行训练,预留剩余数据集作为后续测试样本集.验证在给定工况下,由Carsim和MATLAB组成的联合仿真是否可以得到茶园拖拉机的实时运行参数,并对故障诊断模型的准确率进行分析.
试验方案包括如下几个步骤:
1) 在Carsim中对茶园拖拉机进行参数设定.虽然Carsim软件中提供了拖拉机的模型,但需要对其中部分参数进行修改才可以使用.首先将模型选为拖拉机,然后点击Tractor,进入拖拉机的参数[14]设置界面,新建一组数据,将新的拖拉机的参数输入,新参数如下:车型D-class,SUV w/ ABS;初始车速20 km·h-1;节气门开度0;挡位控制为闭环四挡;方向盘转角0;路面为草地;仿真时间10 s;仿真步长0.001 s.随机设置拖拉机的工况,路面情况选择为草地.
2) 在MATLAB里添加茶园拖拉机的控制策略.
3) 定义Carsim的导入变量,依次为IMP_PBK_L1、IMP_PBK_R1、IMP_PBK_L2、IMP_PBK_R2,记下导入顺序,如图5所示.
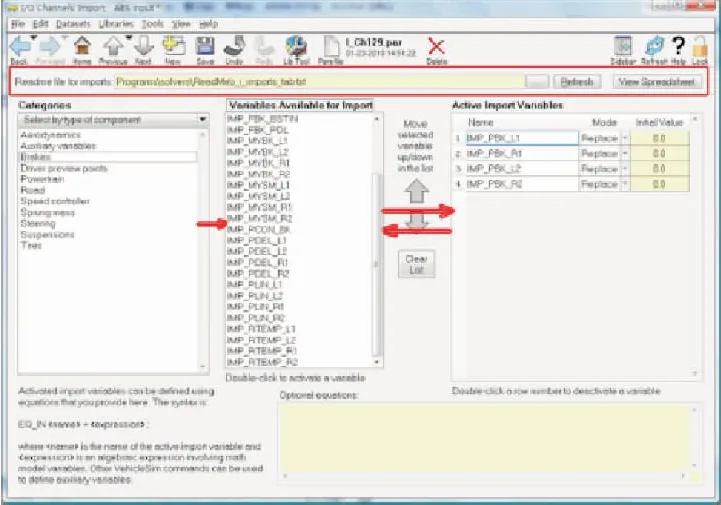
图5 导入变量界面
4) 定义Carsim的导出变量,记下Carsim导出变量的顺序,依次为Vx_L1、Vx_R1、Vx_L2、Vx_R2、Vx_SM、Pbk_Con并回到Carsim主界面.
5) 在MATLAB Command Window中键入Simulink,在Simulink中加入ABS控制模块,如图6所示.

图6 Simulink模块图
6) 返回并运行Carsim软件,打开“send to simulink”,弹出ABS模型,然后点击MATLAB中的运行按钮即可运行整个模型.
4.2 结果分析
当仿真系统运行结束以后,可以通过以下方式查看结果,如图7所示.

图7 输出结果选择界面
在“show more plots”按钮中选择添加新的图形,在弹出的对话框中,将选项名称改为需要的参数,比如“AV_DS_L1”,然后点击该选项.随即在左边黄色区域内输入“AV_DS_L1,TIME”,然后点击“home”回到主界面,再点击“plot”按钮即可得到想要的图形.
Carsim软件提供了所有可输出参数的名称,查看时点击“View”得到图8所示界面,可以找到需要的参数的名称,并按照上述方法使之显示在图形中.
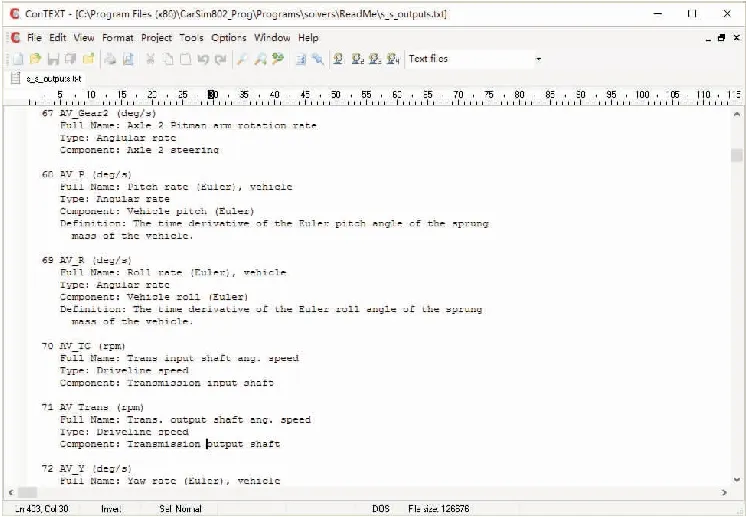
图8 Carsim可输出参数列表
以拖拉机前轮传动轴转速为例,即“AD_DS_L1”参数,设置好参数输出以后,点击“plot”按钮,即可得到拖拉机前轮传动轴转速.可知Carsim和MATLAB的联合仿真可以得到给定工况下茶园拖拉机的运行参数.
同时,在对样本数据进行训练后,将剩余数据导入测试集,进行模型分类效果测试.测试集中有200组标定完成的样本,其中正样本150组,负样本50组,将其输入到模糊神经网络模型中,得到结果如表2所示.

表2 混淆矩阵结果
由此,准确率计算公式可表示为
(3)
式中:TP表示模型预测为正常,实际为正常的个数,表中为143;TN表示模型预测为异常,实际为异常的个数,表中为38;N表示测试集中样本总数.
经计算得出,提出的算法准确率可达90%,满足茶园拖拉机故障诊断的精度要求.
试验中,对其中100组正样本的统计数据记录下来,结果如图9和10所示.

图9 准确性统计结果

图10 时机性统计结果
图9、10表明FNN算法均优于2种对比算法,时机性能优势较明显,准确性也优于对比算法,且文中算法表现更稳定.
5 结 论
1) 改进了故障诊断算法,基于模糊神经网络设计了茶园拖拉机远程故障诊断系统,通过仿真测试后,实现了茶园拖拉机运行状态在线监测与故障诊断功能,诊断结果满足实际要求.
2) 系统以网络为载体,可实现快速诊断,及时发现故障,减少茶园拖拉机维修周期,系统容错率高,出现错误以后,故障处理也很容易,结果清晰明朗.
3) Carsim软件以图形的形式给出了被监控对象的实时参数运行,和传感器采集到的数据叠加在一起,可以很直观地看出被监控对象的运行状态.并且,Carsim软件输出的运行结果基本等同于车辆在真实环境下的运行状态,输出结果具有很高的可信度.
猜你喜欢
一重技术(2021年5期)2022-01-18
一重技术(2021年5期)2022-01-18
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
心声歌刊(2021年6期)2021-02-16
江淮法治(2020年16期)2020-11-27
电子制作(2018年10期)2018-08-04
乡村地理(2018年1期)2018-07-06
儿童故事画报(2018年4期)2018-05-21
百科知识(2018年7期)2018-04-17
小学生导刊(2017年15期)2017-05-17