浅析汽车倒车防撞系统超声波测距电路
2021-09-10 06:35朱伟文
交通科技与管理 2021年3期
朱伟文




摘 要:本文从汽车超声波测距基本原理开始,运用电路分析的方法,剖析超声波测距电子电路原理、组成、元件功能和工作过程;并以汽车超声波测距系统控制电子电路的实例(LM1812超声波控制电路),详细阐述了日产汽车倒车防撞报警系统超声波测距电路工作过程,希望能够为相关初学者和工作者提供借鉴。
关键词:汽车;电子电路;超声波测距;电路分析
0 引言
目前,汽车车辆测距方法主要有:超声波测距、激光测距、雷达测距等三种。采用超声波测距电路电子技术具有测距精确、灵敏度高、成本低、易于做到实时控制等优点,在汽车倒车预警测距电器装置中得到了广泛的应用。汽车超声波测距电子电路技术,主要是解决汽车行驶的安全距离问题,超过安全距离,超声波测距防碰撞系统立即报警以至自动采取减速措施,使车辆处于安全状态。
1 汽车超声波测距工作原理
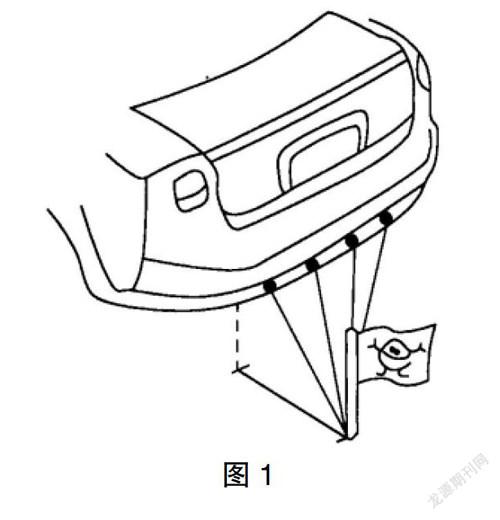
汽车超声波测距的声波频率一般为40 kHz。如图1所示,汽车超声波倒车报警系统装置。系统有四个超声波传感器,均匀安装在汽车后保险杠上未喷漆的部位内。超声波传感器既是执行元件又是传感器,既可发射信号,也可接收信号。如图2所示,超声波传感器由一个无线电收发机和一个整理器构成(见图3),整理器将回波信号转换成数字信号传递给控制单元。简单的工作过程是:当挂上倒挡时,超声波倒车测距系统即开始工作,发出“嘟嘟”的声音,表明该系统状态良好;当车与障碍物相距约1.6 m时,听见间歇警报声。离障碍物越近,声音越急促,距离小于约0.2 m时,连续发出警报声。回波信号被转换成数字信号,并将其传递到控制单元,控制单元根据回波的传播时间计算出与障碍物的距离,即:s=340 t/2(超声波常温下在空气中的传播速度为340 m/s)。
2 超声波测距电路分析
超声波测距电路由超声波发射电路、接收放大电路、倍压检波电路和实时监控电路四个部分组成,下面详细分析各组成电路的工作过程。
2.1 超声波发射电路
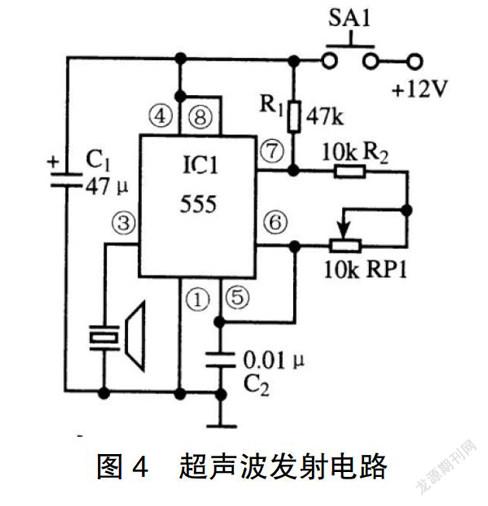
超声波发射电路见图4,是555IC1定时器产生40 kHz超声波的信号电路原理图。电路中电阻R1、R2、电位器RP1和电容C2是外接定时元件,决定输出矩形脉冲的振荡频率和周期。电路工作过程:按下电源按钮开关SA1后,电源+12V→按钮SA1→R1→R2→RP1→C2→负极-。刚接通电源时,电容C2两端电压Uc=0V,结合555IC1定时器的功能表(请读者自行查阅该电路逻辑功能表),可知555IC1定时器的输出脚③=1,内部晶体管VT截止,脚⑦和①相当于开关断开。电源+12 V不断通过R1、R2、RP1向C2充电,Uc电压按指数规律上升,当Uc略大于2/3电源电压12 V时,定时器的状态发生翻转,输出电压跳变为低电平,即输出脚③=0,VT饱和导通,相当于开关闭合,C2通过外接电阻对地放电,Uc电压下降,当下降到略小于1/3电源电压12 V时,定时器再次发生翻转,输出电压跳变为高电平,即输出脚③=1,VT截止,相当于开关断开。电源再次通过R1、R2、RP1向C2充电,电路重复前面的工作过程,形成振荡。因此,超声波发射电路的输出端经超声波发射器UCM-40T向外不断发射矩形波信号。
2.2 超声波接收放大电路
超声波接收电路见图5,图中R3、R6是三极管VT1和VT2集电极的负载电阻;同时R3、R4分别是VT2、VT1的基极偏置电阻,与电源电压Vcc配合,决定放大电路基极电流的大小;R5、C2分别为发射极电阻和射极旁路电容,R5在电路中起负反馈作用,稳定VT2的静态工作点。R5两端并联一个射极旁路电容C2,隔直流通交流稳定R5工作点,避免放大倍数下降。
超声波接收电路工作过程分析:超声波接收器UCM-40T接收发射器超声波信号,将其转换为电信号后,经过二级三极管VT1、VT2放大,送入检波电路C3和VD1,由VD1同时分两路电信号输出,一路直接施加到IC1(集成运算放大器CA3140)的同向输入端。电路路径:发射器→接收器→VT1→VT2→C3→VD1→IC3140→R2;当IC1设定的频率与发射的该信号频率一致时,输出脚电平=1,经R2输出高电平,使三极管VT4导通,继电器线圈KA得电,KA常开主触点闭合,驱动外接主电路的报警器工作(在图5中略)。另一路,经R7、R8,VT3导通,毫安表 mA指针摆动。每按一次电源按钮SA1,发射电路就发射一次超声波信号,接收电路继电器吸合一次,同时毫安表 mA指针也摆动一次,吸合和摆动的时间与发射电路发射信号时间同步。
2.3 倍压检波电路
在图5中C3、VD1、VD2和4.7uF高频滤波电容组成倍压检波电路。C3电容的作用是通交流阻直流,有效地防止直流电回窜给VD1;VD1、VD2的型号是IN4148管,是硅材料小功率高频开关二极管,由于该电路对工作频率要求的很高,当电路出现故障时,不能用普通整流二极管代替,它由导通-截止或由截止-导通所需的时间比一般二极管要短很多。采用倍压检波法,在微波射频领域中,目的就是得到更高的输出电压。
2.4 终端驱动电路
在图5 IC3140(CA3140)中,R1、RP1、R2、VT4、VD3和继电器KA组成超声波接收器终端驱动电路。核心元件是IC3140(CA3140),CA3140高输入阻抗运算放大器,是美国无线电公司研制开发的一种BiMOS具有高速、宽带和低噪声等优点的高电压运算放大器集成芯片。R1、RP1、R2起限流作用,同时R2也是VT4的基极回路电阻;三极管VT4是起开关作用,即是VT4达到饱和状态时,集电极脚c和发射极脚e的电压Vce减少到接近为零(硅管约0.3 V,锗管为0.1 V,称为饱和压降),此时集电极电流Ic=Vcc-Vce/Rc(集电极电阻)≈Vcc/Rc已达到最大值。VD3是一个续流二极管,在VT4截止期间为线圈KA提供通路,防止线圈KA的自感反电動势损坏VT4。
2.5 实时监控电路
见图5,R7、R8、RP2、毫安表 mA、VT3组成超声波接收器实时监控电路。三极管VT3也是起开关作用,工作原理同上VT4。当VT3导通时,支路电路路径:Vcc+12 V→可调电阻RP2→毫安表 mA→VT3→负极-(接地),表指针摆动。
3 日产汽车倒车防撞报警系统超声波测距电路
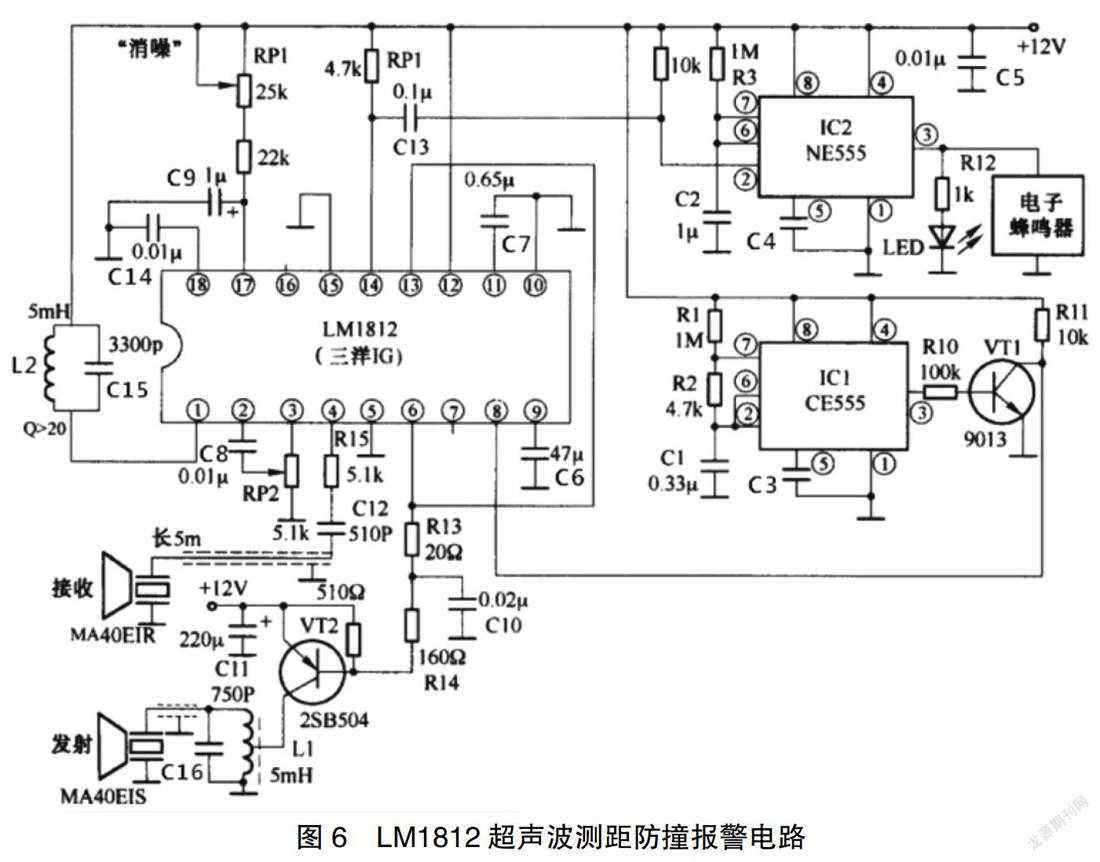
如图6所示,现以日产汽车LM1812超声波倒车防撞报警器电路为例,根据上述汽车超声波测距电路分析的基础原理,分析其元件组成功能和电路工作过程。各个引脚的说明和外围元件功能见下表1,其电路主要由40 kHz的超声波振荡器,检测器、控制器和报警电路等组成。倒车防撞距离为3 m左右,报警灵敏度可调节电位器RP2;检测器是由超声波发射器和接收器两部分组成。
3.1 超声波振荡发生器(40 kHz)电路分析
主要由555时基集成电路IC1(NE555)和R1、R2、C1等元件组成的无稳态多谐振荡器构成。振荡电路工作时产生的矩形波信号从IC1的③脚输出,经电阻R10施加到VT1的基极,经VT1三极管放大后的信号从集电极输出,直接施加到IC(LM1812)的⑧脚内。电路中,改变R1、R2、C1等元件,可以改变振荡电路的振荡频率。
3.2 超声波发射与功率放大電路分析
功率放大电路由IC(LM1812)集成电路⑧脚与⑥脚内的部分电路及驱动管VT2等组成。超声波振荡信号经过其内部有关电路处理后,从⑥脚输出,由电阻R13和R14,以及电容C10组成的“T”形滤波电路,滤波后的信号施加到VT2功率放大管基极,进行功率放大后,施加到L1线圈抽头处。L1与C16两者组成的并联谐振网络,经对信号进一步滤波选频后,由带状屏蔽电缆线传送给超声波发射器(MA40EIS),经超声波发射器对信号做进一步处理后向外空间发射。电路中,超声波发射器MA40EIS与C16、L1组成的40 kHz的输出谐振回路采用并联连接方式。为了防止负载对该谐振回路的影响,回路电感L1采用中心抽头的方式与VT2的集电极相连接。
3.3 超声波接收控制电路分析
接收传感器采用与发射器相配套的MA40EIR,其接收、放大用的谐振回路与发射回路一样,谐振在40 kHz频率上。接收传感器接收到的信号,经整形放大等一系列电路处理后,信号由带状屏蔽电缆引入控制电路,再经电容C12和电阻R15,送至LM1812集成电路④脚内。内部两级放大后同由①脚的谐振回路取出的信号一起送到检测器。此时也检测噪声脉冲,通过⒄脚外接C9和RP1进行滤波,调试时可以调整电位器RP1电阻最佳的位置状态。
总之,首先LM1812①脚外接L2、C15决定电路发射或接收超声波的工作频率,其频率最高可达325 kHz。当⑧脚为高电平时,L2、C15振荡电路开启振荡模式,振荡信号经驱动放大后,由⒀脚及⑥脚输出,LM1812处于发射模式;⑧脚为低电平时,LM1812处于接收模式。其次,当LM1812处于发射模式时,内部第二级放大器自动断开;当切换回接收模式时,第二级放大器暂时不接通,由⑨脚外接电容延时后再接通,延时使接收器暂时封闭(检测器也封闭),为超声波振荡发生器的停止提供足够时间,⑨脚外接电容C6的大小与延时长短有关。最后,LM1812的⒁脚提供与COMS兼容的逻辑输出,⒁脚为内部集电极开路输出,⑾脚保护⒁脚功率输出端,外接电容C7在⒁脚为低电平时(吸收电流)对内部电流进行积分;若将⑾脚接地,则此功能失效。
3.4 光声报警电路分析
光声报警电路受IC2(NE555)时基集成电路和R3、C2等组成的单稳态电路进行控制,由电子蜂呜器发出断续的报警声。同时,LED发光二极管发光,并同步闪烁(如图6)。
3.5 故障电路检修分析
电路出现故障时,主要检测IC1③脚、VT1与VT2集电极、LM1812④脚、⑧脚与⒁脚这几个关键点上的波形来确定故障的可能部位。其简单的工作过程是:当超声波发射器发出的超声波在倒车时碰到物体反射回来,被超声波接收器MA40EIR接收处理后,得到的信号经C12、R15进入IC(LM1812)④脚内,经处理识别后,就会从其⒁脚输出控制信号,该信号经C13电容耦合加到IC2的②脚,触发单稳态电路翻转,从IC2的③脚输出高低变化的电平。当输出高电平时,经降压电阻R12导通LED发光,电子蜂鸣器发出报警声;当输出低电平时,光、声均消失。
4 结束语
综上所述,目前我国经济快速发展,汽车的普及化极大地提高人们综合生活素质,但汽车的行使安全至关重要,汽车车辆测距电子电路的应用就是其中一项安全重要保障的技术之一。在当今众多车辆测距电路技术中,超声波测距电子电路技术依然占据着重要地位。而本文就较好地为从事或即将从事汽车电子电气的维修技术人员提供参考,尽快掌握和理解电子电路元件组成、功能、电路路径、工作过程原理分析等,为汽车超声波测距电子电路故障检测提供理论依据,以提高工作效率和专业职业能力。
参考文献:
[1]刘明.电子线路综合设计实验教程[M].天津大学出版社,2008.
[2]孙余凯,项绮明.新型汽车电子单元电路原理与维修图说[M].电子工业出版社,2004.
[3]毛峰.汽车车身电控技术[M].机械工业出版社,2004.
[4]程周.电工与电子技术[M].高等教育出版社,2006.
猜你喜欢
电脑知识与技术(2022年9期)2022-05-10
重庆与世界(2020年9期)2020-10-20
儿童时代·快乐苗苗(2017年7期)2018-01-24
科教导刊·电子版(2016年27期)2016-11-18
作文大王·低年级(2016年4期)2016-04-18
科技视界(2016年3期)2016-02-26
决策探索(2014年21期)2014-11-25
中小企业管理与科技·下旬刊(2014年6期)2014-08-27
科学大众·小诺贝尔(2009年12期)2009-07-21