
多面立方设计及分析
2021-09-10 05:59陆伟缪卓佑
科教创新与实践 2021年19期
陆伟 缪卓佑
0.设计背景
目前随着科技的发展,各种机器人已经层出不穷。针对各应用特点,开发爬壁机器人时应该根据爬壁机器人将要适用的环境条件选择合适的吸附和运动方式,近年来爬壁机器人在各方面领域的应用越来越广泛,传统的壁面机器人在壁面适应性、功耗、噪音等方面已经无法满足新形势下的应用要求,因而迫切需要一款新型的攀爬机器人。
攀爬机器人的吸附方式有许多种,不同的吸附方式存在各自的优缺点,各自适应于不同的应用环境。如磁吸附方式,结构简洁,吸附力大,不受壁面粗糙度的影响,但是只能应用到导磁材料的壁面;负压吸附不受壁面材质限制,但是却对壁面粗糙度要求较高,壁面凹凸不平很容易使壁面吸附失效,吸附力也相对较弱,运动噪音大,等等。
1.设计方案
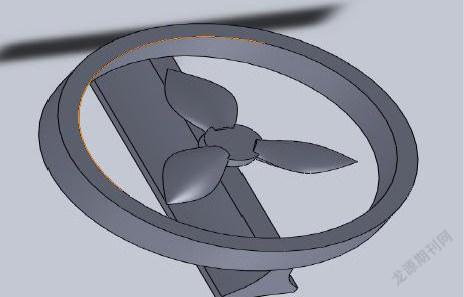
吸附机构在抽气的时候,气体顺着下面的小板往风扇上走,让下面的小板跟风扇的距离调到一个合理的位置,让那个位置时候气体抽进来的流速是最大的,那气体进来的时候会压在小板上,这样就多了一個压力,我们可以在再小板上做上镂空的花纹减少面积,这样负压吸附的时候作用面是这个小板底面,继续增大压力。上图是第一次设计时所采用的叶轮。
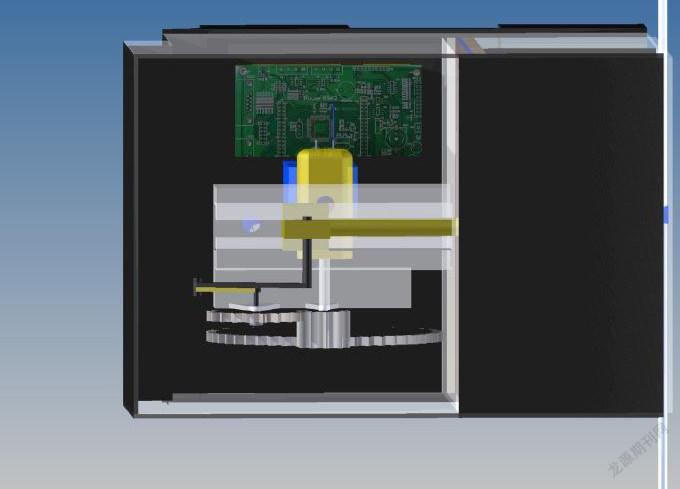
下图为最终设计采用的叶轮以及电机。
下图为上述提到的增大压力的小板地面,并做了镂空减小面积。
起到吸附作用的电机的选择以及计算过程如下:
2吸附设计
当爬壁机器人工作于竖直墙壁上时, 对机器人进行竖直平面内任意姿态的安全受力分析。 为了简化分析, 只需对吸附力要求最高的直线向 上运动状态的爬壁机器人受力状态进行分析。 当爬壁机器人在竖直平面上以与竖直呈 θ 角 姿态直线向 上运动时, 其受力如图 1 所示。
根据达朗贝 尔虚功原理及受力平衡关系, 竖直壁面任意姿态机器人直线运动的受力方程为:
3各部件设计
考虑到马达跟叶轮占有的体积大小,本次决定把地盘设计成13cm×13cm
下面为初次设定时底盘的样式。
下图为底盘最终设定的样式。
下图为车轮组初次设计时采用的样式。
下图为车轮组最终采用的样式
打扫翼
打扫翼由三部分组成 。一个本体的框架结构,一个替换开关,一个可替换的海绵块。
设计样式如下。
通过上述替换开关的旋转,可以轻松的拆分打扫翼并替换损耗的海绵块,设计结构类似于列车上作为背后的可收纳式桌子。
在地盘上两侧安装有磁铁,在收纳状态时牢牢固定住打扫翼。
水箱
作为打扫时清洁液体的来源,水箱被安置在底盘的前部,内部有齿轮连杆机构,可推动前面的活塞做往复运动,从而不停地将液体挤出出水口。
在水箱的内部也有与车轮组一样的电机来驱动齿轮组的运动,旁边有电路板控制。
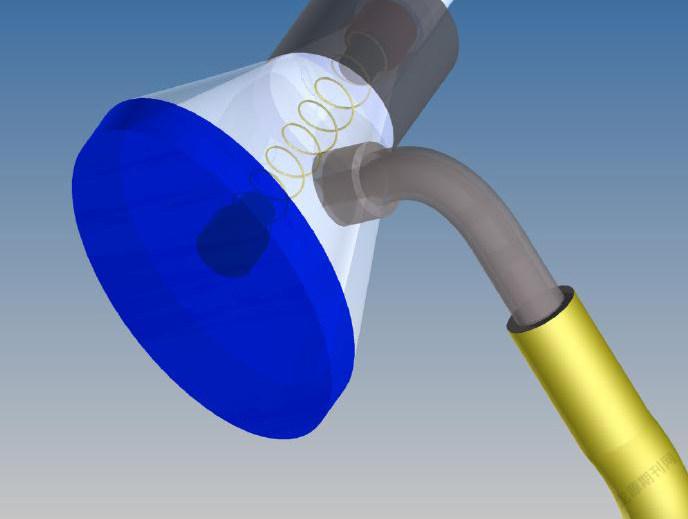
出水装置在活塞将水挤压出来后,推动内部的弹簧。平时伸展的弹簧受挤压收缩,不再堵住出水口,使得水流能够流出。
在地盘上还装有控制用的电路板和电池(内部)。
4.总结与感想
本设计结构可靠,可进行多种功能应用,对机器人设计提供了一定的借鉴。
参考文献:
[1]张越.国内外壁面移动式机器人发展概况[J].唐山工程技术学院学报,1994,16(1):27-30.
[2]濮良贵,陈国定,吴立言。机械设计[M]北京:高等教育出版社 2012:190-230.
[3]李兴华.机械设计课程设计[M]北京:清华大学出版社 2012:9-56.
[4]王国权,龚国庆.汽车设计课程设计指导书[M]北京:机械工业出版社 2009:98-109.
[5]王黎春,胡青春.基于静电吸附原理的双履带爬壁机器人设计[J]机械设计 2012,29(4):22-23
嘉兴市特种设备检验检测院 浙江 嘉兴 314000
同济大学浙江学院 浙江 嘉兴 314000
猜你喜欢
电脑爱好者(2021年2期)2021-01-22
数码设计(2020年9期)2020-10-20
当代工人(2019年23期)2019-12-30
商情(2019年9期)2019-04-01
课堂内外(初中版)(2015年9期)2015-09-10
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
青少年科技博览(中学版)(2014年2期)2014-05-27
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
数理化学习·初中版(2011年9期)2011-11-14
