
基于VSG的多微网二次调频控制
2021-09-23 08:24李凤祥汤军贾军成
电气自动化 2021年4期
李凤祥, 汤军, 贾军成
(江苏大学 电气信息工程学院,江苏 镇江 212013)
0 引 言
近年来,由于化石能源日益减少,可再生能源开始得到各国的重视,分布式发电以其合理消纳可再生能源的特点得到了广泛的应用[1]。为了提高分布式电源的渗透率,微电网之间的互联势必将成为微电网发展的主流趋势,互联的微电网具有相同的任务目标,相互支援,体现了微电网互联的灵活性[2]。
微电网之间通过背靠背变流器互联,便于在各自的电压频率水平下实现理想运行,但是,各个微电网之间的功率平衡以及频率的稳定必须得到保障。文献[3]对多个直流微电网的拓扑结构进行了研究,提出采用分散自律的架构实现集群控制。文献[4]则提出了多微网并/离网的切换控制策略。文献[5]采用联络线控制策略参与多微网调节与协调控制。文献[6]通过多个采用下垂控制的调频电源参与调频,使频率波动稳定在一定范围内。文献[7]则将主从博弈论应用到多微网的优化调度上,解决了多微网运行的经济问题。
基于上述分析,采用下垂控制的逆变电源虽然模仿了同步发电机的下垂调频特性,但不具备转子惯量和阻尼,因此调频时产生波动较大,对系统稳定产生威胁。本文采用改进的VSG控制取代传统下垂控制,有效抑制了二次调频过程时的频率和能量波动,有利于多微网系统的可靠运行。
1 多微网系统的结构与能量控制
1.1 系统结构
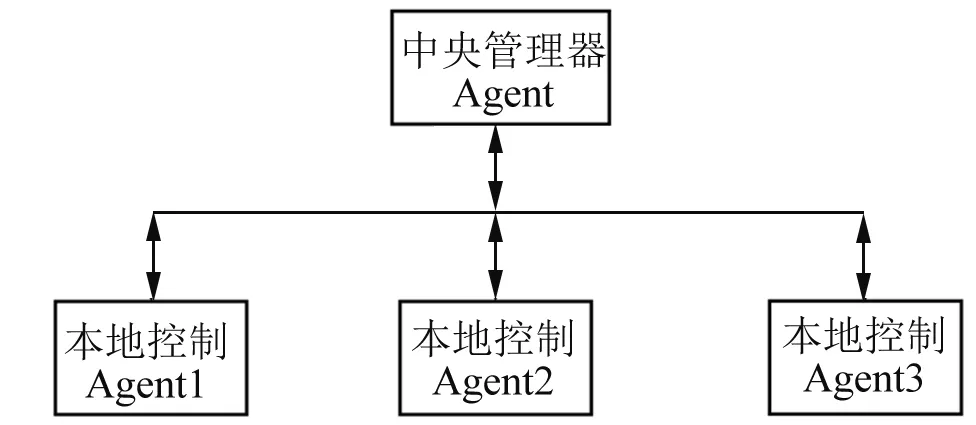
图1 系统结构
本文采用多代理系统作为基础架构对微电网进行协调控制,其具有通信协作、协调分配的优点。混合式结构融合了集中式和分布式结构的优点,因此本文选用混合式架构。系统结构如图1所示。
1.2 能量结构
本文采用集中混合式架构协调各个微电网之间的运行,各个子微网通过联络线并联的方式,先通过总的中央管理器分配各个分支管理器的任务,然后分支管理器进行各自系统内的任务,控制方式灵活多变。
2 二次调频的控制对象和控制策略
2.1 控制对象
在互联的多微网系统中,频率和联络线有功功率是至关重要的两个参考量。本文采用MGCE(microgrid control error)表示微电网控制偏差,由各微电网的频率偏移和联络线有功功率偏移两部分组成,表达式为:
MGCEn=Kf,nΔfn+ΔPL,n
(1)
式中:Kf,n为第n个微电网的频率调整系数;Δfn为第n个微电网的频率偏移量;ΔPL,n为第n个微电网系统联络线上有功功率偏离计划值的量。
由于微电网属于不同的地区,其内部电源和储能装置可能相差较大,相对功率调整自由度比较大。上述公式在稳定频率保证支援的过程中不断调整联络线有功功率平衡,保证系统平稳运行。
2.2 控制策略
本文以两个微电网为模型说明二次调频控制策略,通过MGCC(micro grid central controller)采集误差数据生成总的MGCE,接着分配调节量给调频电源完成任务,如图2所示。

图2 二次频率控制策略框图
图2中:Kf为微电网频率偏移系数;ΔPL为联络线有功功率实际值与计划值的误差;MGCE为各微电网的误差总量;ΔPT为子微网系统的功率调节总量;ΔPDG为分配给各调频电源的功率调节量;PDG、PDG,R为DG输出的实际功率及功率参考值。
首先,MGCC采集各微电网的数据,计算出频率偏差以及联络线有功功率偏差,将两者结合成MGCE,经过比例积分环节得到子微网的功率调节总量。方程式如下:
(2)
式中:Ki和Kp分别为PI控制的积分和比例系数;ΔPT为子微网系统的功率调节总量;MGCE为微电网的控制偏差。
由于计算式中含有积分项,调整量ΔPT最终为0。调整时,微电网中心控制器将功率总调节量按照调频电源的容量分配功率调整量,即:
(3)
式中:aj为功率分配系数;ΔPDG为分配给各调频电源的功率调节量。
考虑到电源功率偏差,将调频电源有功功率偏差计入功率分配公式,有利于加快系统中频率调整的速度。改进后的公式如下:
(4)
3 微电网的二次调频
在二次调频中,调频电源通常采用无通信的下垂控制以实现各调频单元独立调频,但传统的下垂控制只具有同步发电机的调频励磁特性,不具备其转子惯性和阻尼特性,因此本文在调频过程中采用了虚拟同步发电机(virtual synchronous generator, VSG)控制,在下垂控制中加入转子运动方程,使系统具备转子惯性和良好的阻尼特性。下面给出一个调频电源的控制结构图作为范例,如图3所示。
加入的转子运动方程如下:
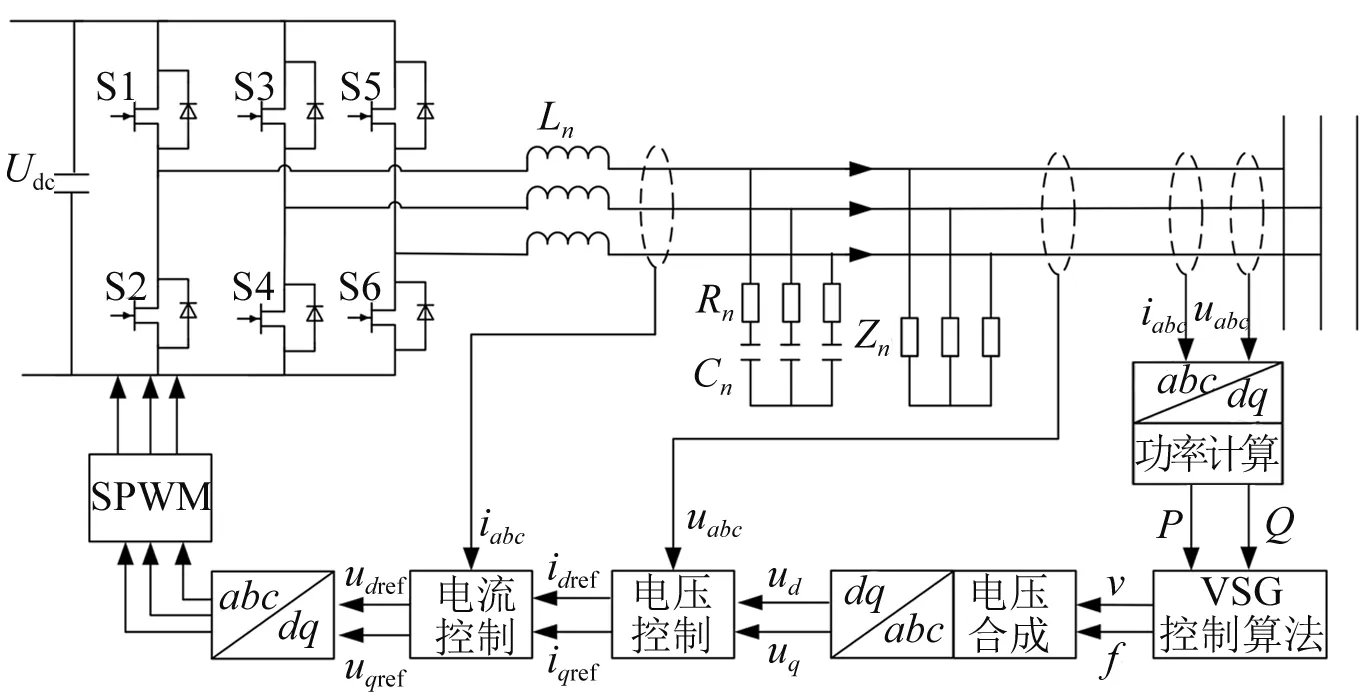
图3 DG的VSG控制结构图
(5)
式中:Pe为拟同步机的电磁功率;Pm为虚拟同步机的机械功率;ωN和ω分别为额定角频率和实际角频率;J为转动惯量;D为VSG的阻尼系数。
根据同步发电机的调频特性,原动机调节方程为
Pm=Pref+Kw(ωN-ω)
(6)
式中:Pref为有功给定;Kω为调差系数。
由式(5)和式(6),可得式(7)和式(8)。
(7)
(8)
式中:P为VSG输出有功功率;dp、τ分别为有功—频率下垂系数和时间惯性常数。
不难看出,VSG控制本质上是加入了转动惯量的有功—频率下垂控制,转动惯量能抑制频率响应速度,达到平滑调频的目的。
Pref为初始功率指令,加入功率调节量,生成新的功率指令P′ref,再通过VSG控制,最终达到控制目标。调频策略如图4所示。
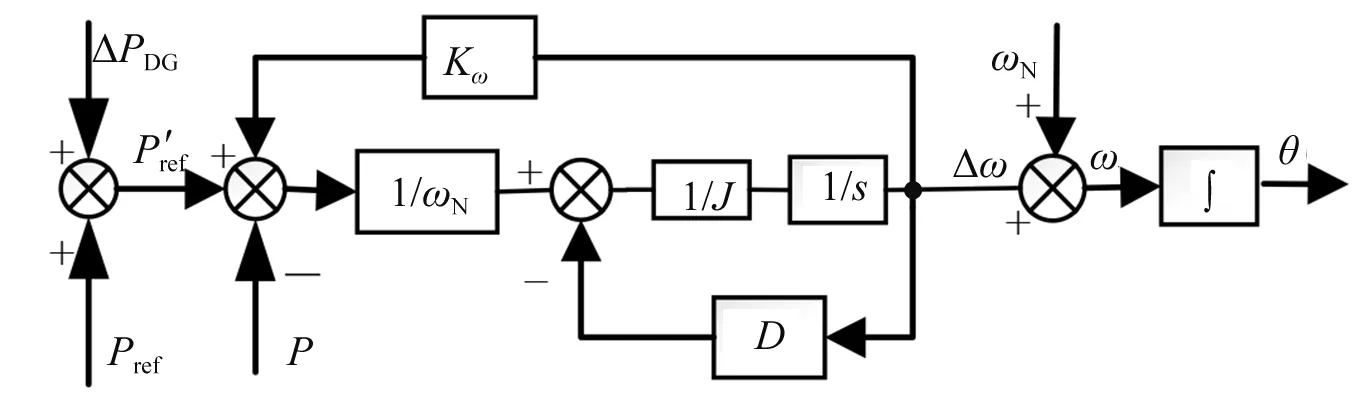
图4 有功—频率控制框图
最终功率指令值的计算公式为:

(9)
式中:aj为功率分配系数。aj表达式如式(10)所示。
(10)
4 仿真结果和分析
本文使用仿真软件MATLAB建立如图5所示的多微网互联模型,此处以两个微电网互联为例,设定两个微电网的额定电压为380 V,频率为50 Hz。VSG1~VSG4均为可调频电源。太阳能发电单元经交流馈线接入联络线中,其逆变器控制采用MPPT控制。
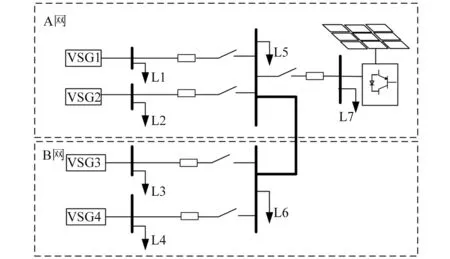
图5 多微网互联模型
给出VSG逆变电源下垂系数以及部分控制系统参数,如表1所示。
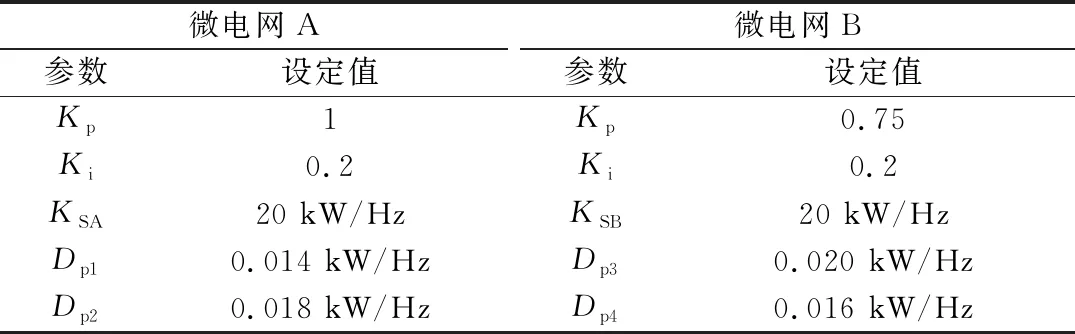
表1 VSG逆变电源下垂系数以及部分控制系统参数
4.1 单微网发生负荷扰动
研究设置初始状态下系统频率为49.985 Hz,联络线有功功率为27.9 kW,方向由B网流向A网,到1 s时,A网负荷L 5投入运行。系统频率和联络线功率如图6所示。
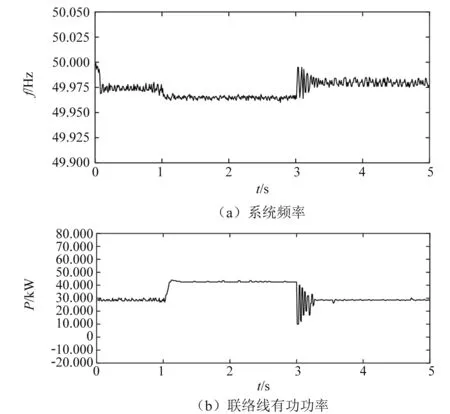
图6 改进前仿真结果
由图6可知:0~1 s系统平稳运行;在1 s时加入负荷,导致频率下降,电源启动一次调频环节,由于偏差,频率一次调整结束后维持在49.975 Hz,这个过程中联络线有功功率上升至42.5 kW;3 s时启动二次调频环节,从联络线的有功功率变化来看,A网流出的有功功率和B网流入的有功功率相当,二次调频结束后联络线有功功率恢复到28.2 kW,系统频率恢复至49.985 Hz。研究发现,系统频率和联络线有功功率波动很大,采用本文改进控制策略后,明显转好。仿真结果如图7所示。
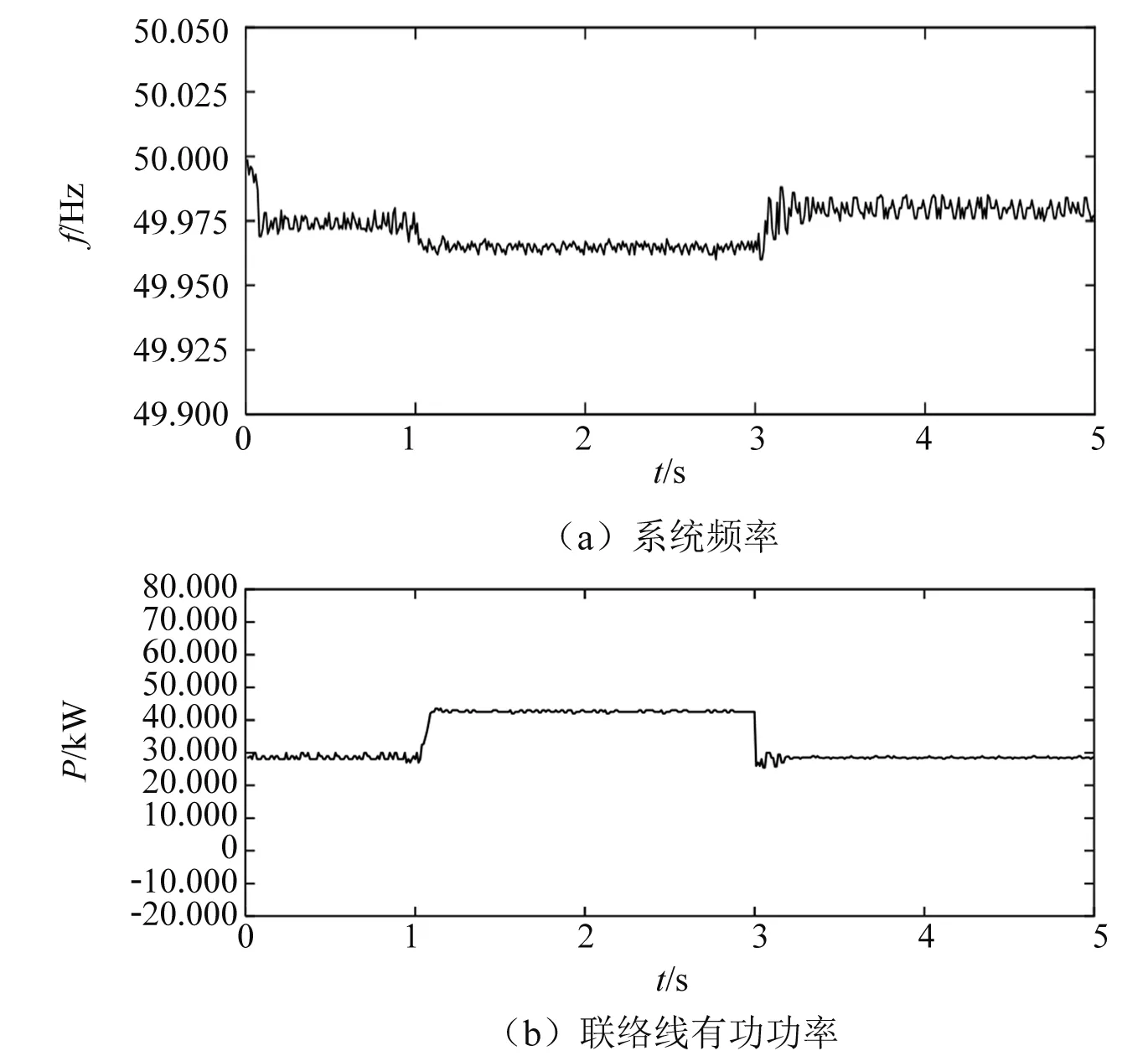
图7 改进后仿真结果
4.2 双微网发生负荷扰动
恢复系统后进行第二次仿真,在1 s和2 s时分别投入负荷L 5和L 6,3 s时进行二次调频,改进后的频率和联络线有功功率如图8所示。
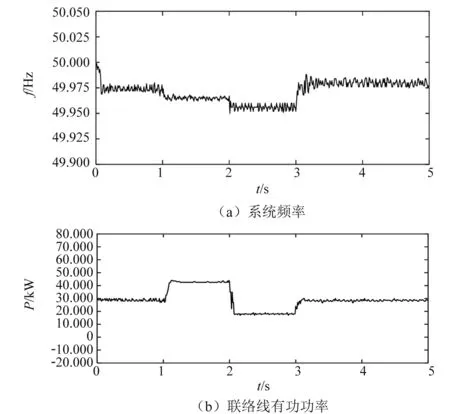
图8 双负荷扰动仿真结果
由于1 s和2 s增加负荷,系统的频率先下降到49.974 Hz,后进一步下降至49.956 Hz,有功功率也偏离了计划值。由于A网负荷增加更多,因此A网的两个逆变电源主要满足自身负荷需求,而B网的两个逆变电源对A网加以支援。3 s以后,B网中的VSG3、VSG4不再支援,A网的两个逆变电源VSG1、VSG2为满足负荷需求展开二次调节增加输出,联络线有功功率也恢复至原先的计划值附近。
5 结束语
本文针对多微网的频率调整问题提出了基于VSG的二次调频控制策略,由MGCC统一计算各微电网的有功功率调节总量,再根据各调频电源的容量合理分配功率调节量。在频率二次调整中,本文采用改进的VSG技术取代下垂控制。研究表明,采用上述控制策略能够完成微电网相互支援,有效平稳地完成频率调整,抑制有功功率波动。
猜你喜欢
能源工程(2021年5期)2021-11-20
山东交通科技(2020年2期)2020-08-13
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2020年9期)2020-02-06
通信电源技术(2016年6期)2016-04-20
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18
电测与仪表(2015年16期)2015-04-12
海军航空大学学报(2015年4期)2015-02-27
电测与仪表(2014年12期)2014-04-04
