基于单元模型的复杂轮系运动方案设计*
2021-09-28 01:33马雅丽沈瑞豪闫立山
组合机床与自动化加工技术 2021年9期
陈 志,方 振,马雅丽,沈瑞豪,闫立山
(大连理工大学机械工程学院,辽宁 大连 116024)
0 引言
机械系统的方案设计是要在给定的功能需求与设计约束的条件下完成系统的方案综合,而功能需求是方案设计过程中最主要的元素之一。轮系的运动功能需求最关键是要考虑输入输出的方向与大小。
近些年,齿轮轮系的方案设计方法主要基于图论理论。图论理论在轮系中的应用方法是寻找构件与构件关系去对应图论模型,从而进行复杂轮系的结构衍化与性能分析工作,进而综合出所有的运动链[1]。文献[2-4]应用图论思想确立了用于复杂轮系系统化研究的图论模型。文献[5]基于图论法进行方案穷举和筛选以实现传动方案的自动生成。文献[6]列举了单自由度有9个构件的复杂轮系运动链。文献[7]综合出7个构件的多自由度复杂轮系运动方案图。
由功能需求出发,文献[8]根据四轴加工中心机构的拓扑结构特性,对其机构方案进行创新设计研究。文献[9-11]根据矩阵分解规则以及状态空间的理念,建立了单自由度、多自由度的串联、混联机械的系统运动方案设计体系。文献[12]提出了基于单元能量与结构特征状态的机械系统方案设计方法。本文以状态空间为基本理论依据,通过研究复杂轮系的基本传动单元,抽象出数学模型,研究模型的分解与重构,提出了一种新式的轮系运动方案设计方法,完善了轮系的设计理论体系。
1 复杂轮系的基本传动单元
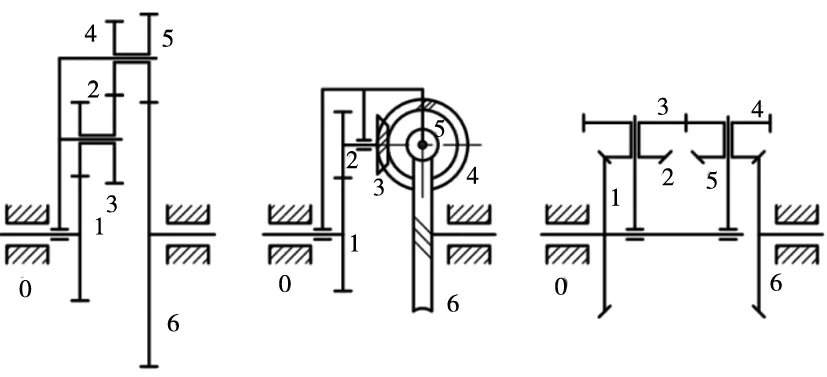
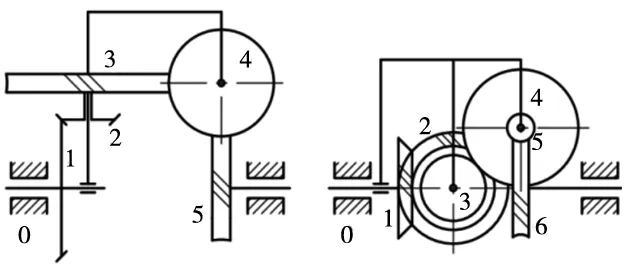
复杂的齿轮系统是由若干轮系单元相互组合而构成的,轮系基本传动单元是构成复杂轮系系统分析、设计的最小功能单元,对轮系基本传动单元的研究才是解决轮系问题的根本。因此,复杂轮系的分析与拆解是运动方案设计的基础,对空间轮系系统而言,其基本传动单元分别为:定轴基本传动单元、单双自由度行星基本传动单元。如图1~图3所示。
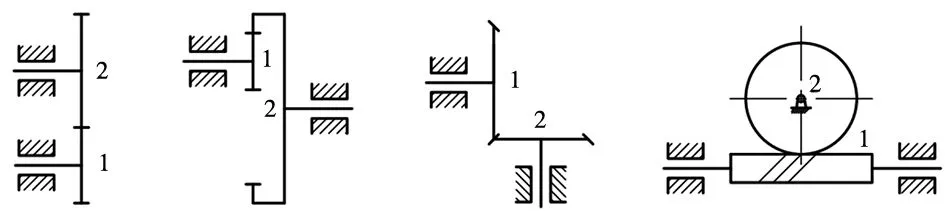
(1)平行轴内啮合 (2)平行轴外啮合 (3)相交轴外啮合 (4)交错轴外啮合图1 定轴基本传动单元
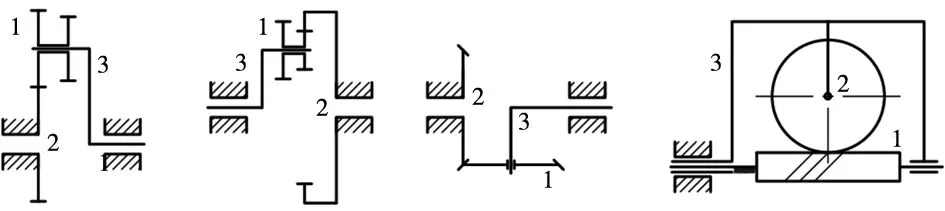
(1)平行轴内啮合 (2)平行轴外啮合 (3)相交轴外啮合 (4)交错轴外啮合图2 单自由度行星基本传动单元
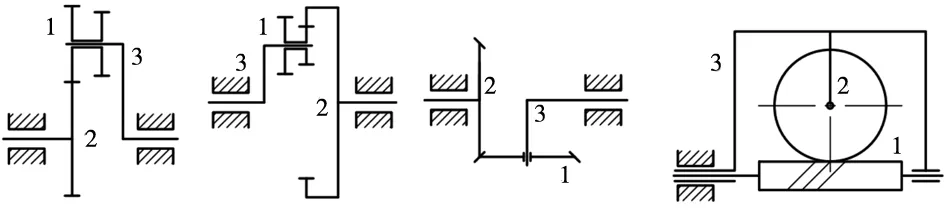
(1)平行轴内啮合 (2)平行轴外啮合 (3)相交轴外啮合 (4)交错轴外啮合图3 双自由度行星基本传动单元
2 轮系单元的运动特征模型
轮系传动单元的运动转换特征模型是用来描述运动的变换,即轮系输入端到输出端的运动方向与大小的变化。由于拆分后的行星基本传动单元可将定轴与动轴的传动相互转换,故在输入输出为定轴的周转轮系中,行星传动也只是构成其中的一部分。因此,在行星基本传动单元的数学模型的构建过程中,可以忽略行星轮任意时刻的运动状态,描述其运动初始状态下的运动特征转换信息。故本文主要研究内容为基于单元模型的输入输出为定轴的轮系运动方案的设计方法,只需给定复杂轮系的输入端与输出端的运动特征空间,得到其运动转换特征模型,从而根据抽象的数学模型与相应分解算法得到运动方案。下面,用数学模型对轮系基本传动单元的运动特征转换过程进行描述。
首先建立笛卡尔坐标系,设输入端的传动方向与x轴方向相同,y轴方向由输入构件几何中心指向输出构件的几何中心的方向,z轴方向与xoy平面垂直,运动的正负方向以右手定则确定。令i,j分别表示输入与输出齿轮,对定轴基本单元与行星基本单元,它们相对运动转换方程可统一写为如下形式。
(1)
3×1列向量表示输入输出齿轮相对于机架或行星架的运动大小和方向,称为运动特征空间。3×3矩阵表达在齿轮的传动过程中,运动的转换关系,称为运动转换矩阵。若轮系单元输入输出的运动特征空间已知,通过矩阵的运算规则,可以得到运动转换矩阵。
例如,以zi表示主动轮i的齿数,zj表示从动轮j的齿数,若齿轮i的运动输入方向为x轴的正方向,齿轮j的运动输出方向为y轴的正方向,则运动转换方程为:
若齿轮i的运动输入方向为x轴正方向,齿轮j的运动输出方向为y轴的负方向,则运动转换方程为:
3 轮系的运动方案设计方法
复杂轮系系统的运动方案设计的研究重点在基本传动单元上,设计过程就是通过对拆分得到的基本传动单元进行再组合过程,按照制定的分解规则对复杂轮系的运动特征矩阵进行拆分,得到单元转换矩阵,再对照传动单元库,组合后得到复杂轮系的运动方案。
3.1 设计基本要求
输入端与输出端都是定轴的复杂轮系,故设计的基本要求如下:
(1)输入构件与输出构件必须为连架杆;
(2)输入与输出的运动方向确定;
(3)输入与输出的轴线相对位置:同轴、垂直、平行不同轴。
3.2 设计约束条件
(1)类型约束
连接的构件具有相同的运动类型,即同为定轴转动或者同为行星运动。
(2)方向约束
前一个基本传动单元的输出与后一个基本传动单元的输入需保持相同的运动方向,如果运动方向不一致,需要对后一个基本单元的坐标进行转换。
假如:已知前一个基本传动单元输出构件的运动方向为y轴方向,而后一个基本传动单元中输入构件的方向与x轴同向,则后一个基本传动单元需绕z轴进行坐标转换,使其输入方向与y轴相同。
3.3 设计过程
(1)在笛卡尔坐标系下,由输入输出的运动功能要求得出输入输出运动特征空间。将运动特征空间映射为运动的传动方向矢量,这个传动方向矢量与基本单元的运动特征空间为一一对应关系。以x轴方向为标准方向,如果轮系的输入方向与x轴不同向,则需要对轮系系统做方向转换,将输入方向转换与x轴同向。例如,输入方向Ri与x轴同向,输出方向Ro与y轴同向,则传动方向矢量为:
(2)由已知的输入输出传动方向矢量,根据矩阵运算规则,可以得到传动方向转换矩阵。
通过传动方向转换矩阵,可以匹配得到基本传动单元。传动方向转换矩阵公式为:
A=Ro·RiT
(2)
按(1)的实例,可求出:
(3)如果没有匹配的基本传动单元,则将这个转换矩阵按指定的组合方式进行矩阵分解(分解方法将在下节叙述),再到单元库中搜索与分解后的轮系单元转换矩阵相对应的基本传动单元。
3.4 运动转换矩阵的分解方法
轮系问题的基础是研究轮系基本传动单元的性能。轮系单元主要有三种组合形式,分别是串联式、并联式以及混合式,混合式中既有串联式又有并联式,因此,在研究轮系单元组合性能时,需要首先对串联式和并联式进行组合性能研究。下面以x轴输入、x轴输出的传动方向转换矩阵为例说明矩阵分解算法。
矩阵元素的运算规则:
0⊕0=0 1⊕1=1 0⊗0=0 1⊗1=1
串联式组合矩阵分解算法:
(3)
并联式组合矩阵分解方法:

(4)
综上所述,轮系的运动方案设计流程如图4所示。
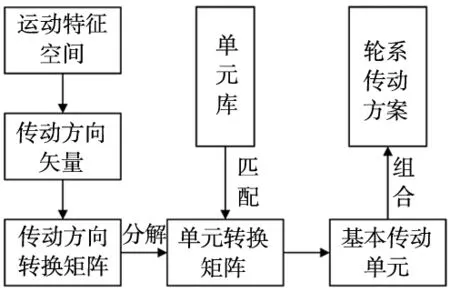
图4 轮系的运动方案设计流程图
4 运动方案设计实例
下面将通过2K-H型空间周转轮系的例子,对轮系的运动方案设计方法进行说明。因为双自由度的轮系可以蜕化为单自由度的轮系,所以本文只考虑双自由度的2K-H型空间周转轮系的设计,该轮系的运动方案设计是根据其初始状态下的相对运动转换设计的。
(1)设计要求:2K-H型空间周转轮系的输入输出方向均与x轴同向且保持同轴,它们的输入输出传动方向矢量为:
(2)输入-输出传动方向转换矩阵为:

(3)建立单元组合矩阵
由于是定轴输入输出,单个行星基本单元无法满足运动要求,需要对转换矩阵进行分解,来寻找满足要求的基本传动单元。
将传动方向转换矩阵按照串联方式进行分解为2个基本传动单元,其分解情况如下所示:
由2个基本传动单元组合得到的周转轮系设计方案应用最普遍,对传动方向转换矩阵继续分解,将其再次分解为3个基本单元,则其分解情况为:
对方案2做具体分析,转换矩阵的具体分解情况如下所示:

对分解得到的3个单元转换矩阵与单元库进行匹配检索,可得到相对最优的3个基本传动单元,如图5所示。
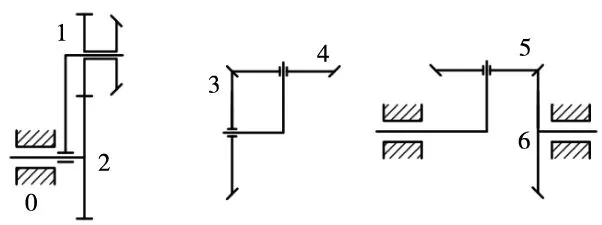
图5 基本传动单元
将得到的3个基本传动单元组成合并,得到2K-H型空间周转轮系系统的机构简图,如图6所示。

图6 2K-H周转轮系机构简图(方案2)
对其余5种含3个基本传动单元的2K-H型周转轮系按上述过程进行运行方案设计,可以得到5种相对最优的机构简图,如图7所示。
(1) 方案一 (2)方案三 (3) 方案四
(4) 方案五 (5) 方案六图7 2K-H周转轮系机构简图
通过基于单元模型的轮系方案设计方法,可以得到输入与输出端确定的所有轮系运动方案,并从中搜寻所需求的传动方式。
5 结论
(1)复杂轮系单元的运动状态模型是表征轮系传动单元输入、输出的转换关系的数学表达式,建立轮系单元的运动状态模型是进行复杂轮系运动方案设计的根本途径,是研究轮系问题的理论依据;
(2)轮系的单元组合的方法是运动方案设计的理论基础,研究轮系单元组合以及单元组合的逆向求解过程是解决复杂轮系运动方案设计的重要因素;
(3)通过建立轮系系统的传动方向转换矩阵,对该矩阵进行逆向分解,得到满足系统运动转换方程的轮系单元转换矩阵,将该转换矩阵与轮系单元库进行匹配,得到若干个轮系基本传动单元,从而对复杂轮系系统的运动方案进行设计。
猜你喜欢
智能制造(2021年4期)2021-11-04
北京航空航天大学学报(2021年9期)2021-11-02
装备制造技术(2021年5期)2021-08-14
建材发展导向(2021年6期)2021-06-09
装备制造技术(2019年12期)2019-12-25
铁道通信信号(2019年3期)2019-04-25
制造技术与机床(2017年7期)2018-01-19
校园英语·中旬(2017年10期)2017-11-20
初中生世界·九年级(2017年8期)2017-09-06
吉林省教育学院学报(2017年3期)2017-05-31