
矿用无轨胶轮车调度系统的设计与应用研究
2021-10-15 09:13孙俊
机械管理开发 2021年9期
孙 俊
(晋能控股煤业集团四老沟矿大型设备管理队,山西 大同 037000)
引言
随着煤矿领域的不断发展,采煤效率越来越高,对煤矿运输系统要求也越来越高,煤矿中使用的有轨运输系统,其劣势逐渐显露[1]。无轨胶轮车作为煤矿领域非常重要的辅助运输设备,不需要受到轨道的限制,使用时具有很大的灵活性,在煤矿领域得到了很广泛的应用,在提升运输效率方面发挥着非常重要的作用[2-3]。但是煤矿井下工作环境较为复杂,巷道通常比较狭窄,如果调度不当可能导致无轨胶轮车在矿井内发生堵塞等问题,严重时可能引发安全生产事故[4]。基于此应充分结合煤矿巷道实际情况,设计研究无轨胶轮车调度系统,以便实时掌握矿井内无轨胶轮车的运行状态,并对其运行轨迹进行调度,保障矿井运输安全[5-6]。
1 调度系统整体结构设计
图1为设计研究的矿用无轨胶轮车调度系统整体结构框图。从图中可以看出,调度系统整体上可以划分成为两大部分,分别为井上和井下部分。井下部分的作用主要是完成井下无轨胶轮车的定位以及信息的检测、上传等功能,主要由检测节点、移动节点、信号灯、传感器等部分构成。通过传感器检测车辆的位置信息,并充分结合矿井内部其他区域的车辆信息情况,判断车辆能否安全通过下一个区间,并通过信号灯来控制无轨胶轮车的停止与运行。井上部分的作用主要是对井下所有无轨胶轮车的运行状态进行记录并显示,同时还需要对井下各分站以及信号灯进行控制。
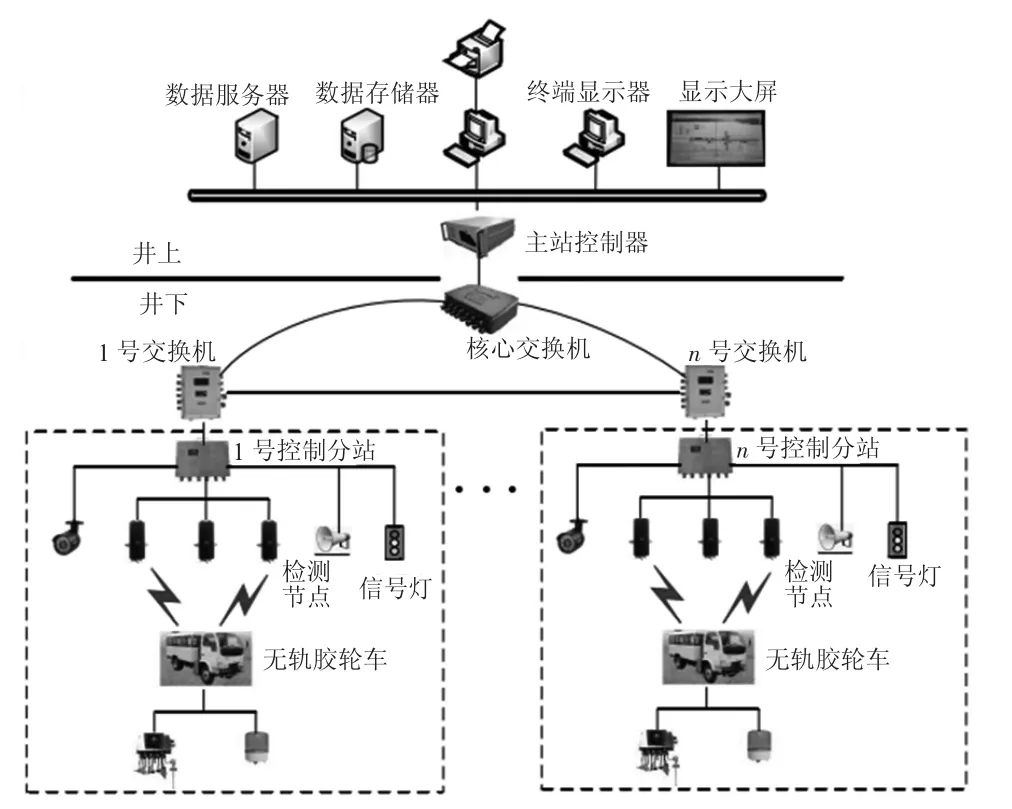
图1 无轨胶轮车调度系统整体结构框图
无轨胶轮车的调度全部由系统自动控制,正常情况下无需人为干预,特殊情况下可以通过人为方式进行控制。通过井上部分和井下部分之间的相互协调工作,使得工作人员能对井下所有车辆的运行轨迹进行充分掌握。调度系统的应用能够实现矿井无轨胶轮车的自动化控制和可视化。
2 调度系统主要硬件设施选型
2.1 井上控制主站选型
井上控制主站的作用是接受井下部分的车辆信息,并对所有车辆信息进行综合判断分析,结合控制策略下达控制指令,对井下分站以及所有信号灯进行控制,实现无轨胶轮车的调度。结合实际情况选用的井上控制主站型号为610-H/L,该型号设备具有非常丰富的I/O接口,可以很好地与其他硬件设施进行连接,实现功能的拓展,对数据处理的能力也能够满足实际使用需要。
2.2 井下控制分站处理器选型
井下控制分站处理器的作用是根据采集到的数据信息分析判断车辆的具体位置,并根据井上控制主站下达的控制指令对无轨胶轮车进行控制。选用的处理器型号为西门子公司研制生产的S7-200型PLC控制器,该型号控制器具有稳定的功能,且有丰富的I/O拓展接口,能够通过多种网络模式实现数据信息的交互,在工业领域有广泛应用,已经得到了实践的检验。
2.3 无轨胶轮车定位模块选型
定位模块主要由两部分构成,分别为检测节点和移动节点,检测节点安装在煤矿巷道固定位置上,移动节点车放置在无轨胶轮车上,移动节点的位置即为无轨胶轮车的位置。工作过程中,移动节点将车辆相关数据信息,包括运行速度、油温、ID编号等向外发射,检测节点接受移动节点发射的数据信号。由于两个节点之间需要实现无线数据传输,因此选用的是CC2530型芯片作为定位模块的处理器,该型号处理器内置有ZigBee协议,可以实现无线数据传输。图2所示为无轨胶轮车定位模块的工作示意图。
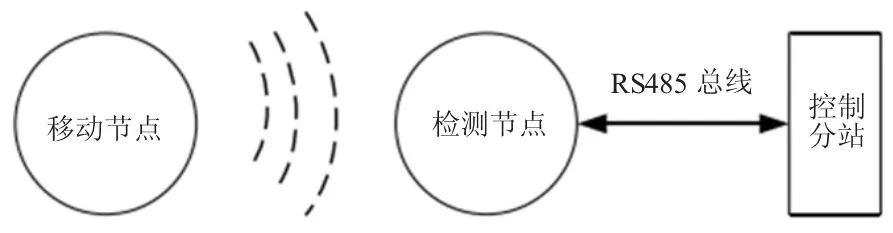
图2 无轨胶轮车定位模块工作示意图
2.4 车辆信息检测模块选型
为了保障无轨胶轮车在井下的运行安全,有必要对车辆的运行状态数据信息进行检测,主要检测的信息包括运行速度、油温、油压以及环境瓦斯浓度。结合实际情况选用柴油机车保护监测仪对上述信息进行检测,具体型号为YE0.3/24。该型号监测仪工作时的电流和电压分别为300 mA和DC 15~30V。
3 调度系统的软件设计
调度系统软件部分是整个系统的灵魂所在,是实现各项功能最为关键的环节,本系统中井下软件程序最为关键,以下主要对该部分软件程序进行介绍。井下部分的主要作用是获取无轨胶轮车的相关数据信息,并对数据进行分析并判断车辆的具体位置及其运动方向。同时根据井上部分下达的控制指令对信号灯进行控制。井下所有硬件模块都要配套使用软件程序才能实现各项功能。图3为井下部分软件整体构成框图。
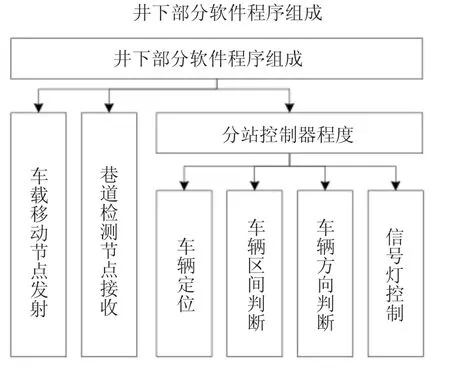
图3 井下部分软件整体构成
图中,最重要的是对无轨胶轮车的定位及其运动方向的判断,图4所示为无轨胶轮车的定位方法基本流程图。调度系统工作时检测节点会不断地接收移动节点发射的信号数据。当接受到同一移动节点发射的三个数据信号时,可以从中筛选出信号强度最大的三组数据,每组数据都对应有一个确定的RSSI值,该数值大小决定了移动节点和检测节点之间的距离。系统可以根据RSSI值计算得到两者之间的距离,在此基础上根据三角质心算法来确定移动节点的三维坐标,即车辆的具体位置。
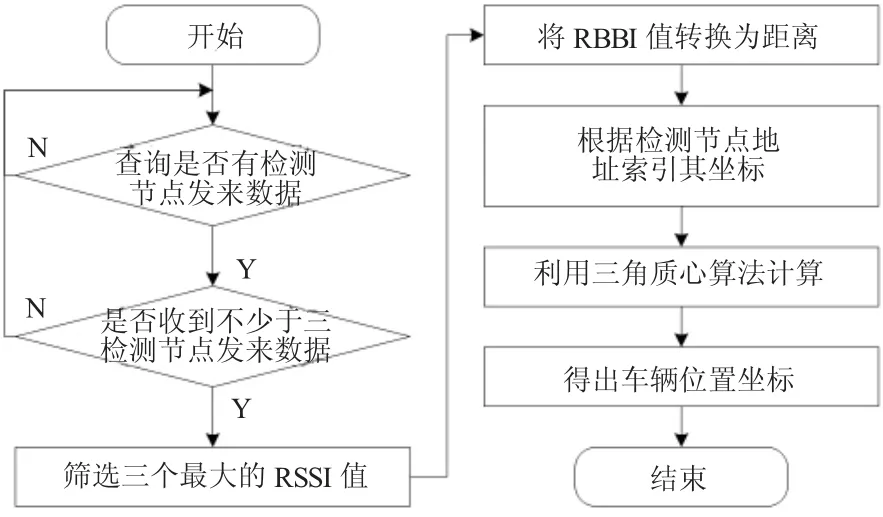
图4 无轨胶轮车定位方法流程图
在判断无轨胶轮车移动方向时,主要是根据固定检测节点和移动节点之间数据传输时的RSSI值大小进行判断。如果随着时间推移RSSI值越来越小,意味着两者的距离越来越远,相反的,若RSSI值越来越大,则表示两者之间的距离越来越小。在此基础上可以判断车辆的移动方向。
4 调度系统的实践应用分析
将设计的无轨胶轮车调度系统应用到煤矿工程实践中,并对其各项功能进行了连续三个月时间的测试和验证。结果发现调度系统取得了很好的实践应用效果,可以对矿井内的无轨胶轮车进行准确定位,在此基础上对信号灯进行准确控制,实现车辆的高效调度。同时,位于井上部分的服务器可以对所有车辆信息进行存储,在监控显示屏中显示车辆的运行轨迹。在系统管理层面,所有用户都需要通过账号和密码才能进入系统,操作日志自动保存,系统出现问题时可以调取查看。利用调度系统可以对矿井中使用的无轨胶轮车进行高效管理,比如可以对车辆进行登记、查询等。无轨胶轮车运行过程中如果存在违章情况,比如占道、不按信号灯指示运行等情况时,系统会发出声光警报以提示相关人员,从而保障无轨胶轮车的运行安全。无轨胶轮车调度系统的成功实践应用,不仅显著提升了车辆的运行效率,同时还在很大程度上保障了矿井安全,为煤矿企业创造了良好的经济效益和安全效益,得到了矿井人员的一致认可。
猜你喜欢
机械管理开发(2022年10期)2022-11-12
机械管理开发(2021年12期)2022-01-27
机械管理开发(2020年4期)2020-06-10
铁道通信信号(2020年10期)2020-02-07
商品与质量(2019年12期)2019-12-19
北京航空航天大学学报(2019年9期)2019-10-26
成都信息工程大学学报(2019年3期)2019-09-25
中国煤炭工业(2019年3期)2019-08-27
三门峡职业技术学院学报(2019年1期)2019-06-27
中国煤炭工业(2019年1期)2019-06-17
