
矿用胶轮车自动调度控制系统的设计
2022-01-27 06:29张辉
机械管理开发 2021年12期
张 辉
(晋能控股煤业集团晋圣亿欣煤业有限公司, 山西 晋城 048006)
引言
煤矿运输包括有主运输和辅助运输,其中,主运输主要是指带式输送机、刮板输送机;辅助运输主要分为轨道辅助运输和无轨辅助运输。本文所研究的胶轮车为无轨辅助运输的一种,也是煤矿常见的运输模式之一。但是,在实际应用中由于巷道内空间狭窄,仅能够保证一辆胶轮车通过,极易导致车辆堵塞,需要频繁倒车解决上述问题,甚至发生较为严重的安全事故[1]。因此设计了一款自动调度控制系统,以保证胶轮车在巷道安全、高效通过。
1 矿用胶轮车自动调度控制系统的总体设计
结合胶轮车在实际生产的运输需求,要求其自动调度控制系统需满足如下要求:
1)矿井胶轮车的调度任务是基于控制算法而实现的,从而保证控制的精度和实效性;
2)矿井胶轮车自动调度控制系统具备上位机显示功能,方便用户实时通过界面直观掌握工作面胶轮车的运输状况;
3)需采用可靠、高速的信号传递软件实现上位机与下位机的实时通信。
1.1 矿用胶轮车自动调度控制系统概述
自动调度控制系统包括有自动控制和调度系统两部分,具体划分为胶轮车辆的监测定位、自动调度与控制以及上位机显示功能。
胶轮车辆监测定位功能:对现场胶轮车辆的位置和运行方向进行实时监测和控制;
自动调度与控制功能:在对现场路况进行监测的基础上,对所有车辆的运行状态进行控制;同时,可对现场车辆运行的优先级根据运输任务进行调整[2]。
上位机显示功能:用户可通过上位机显示软件对胶轮车辆的行驶位置、行驶路线以及交通灯的状态进行实时显示。
矿用胶轮车自动调度控制系统需结合矿井巷道的实际情况进行制定,巷道可分为直线型巷道和三岔口巷道等。针对胶轮车辆数量及其他信息的采集,需在区段的出入口位置安装对胶轮车辆进行检测的装置,主要对胶轮车辆是否进入错车点或是否离开错车点进行监测。对应的,在胶轮车辆的车身位置安装无线发射装置,并在工作面巷道沿途内安装“接收机”。接收机的布置如图1 所示:
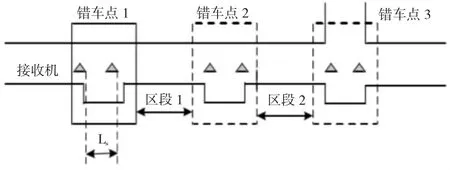
图1 接收机布置位置
1.2 胶轮车辆监控系统的总体设计方案
结合矿井胶轮车辆的运输任务,胶轮车监控系统须实现对区段内所有车辆行驶方向进行监测,并通过无线传输功能实现相关采集信息的传输[3]。总的来讲,胶轮车辆监控系统包括有发射节点、检测点、检测基站和发放控制信息的交通信号灯等。胶轮车辆监控系统总体框图如下页图2 所示。

图2 胶轮车辆监控系统总体框图
上述系统中,除了常规的车辆检测定位单元、通信单元、车辆运行状态显示单元以及人工干预控制单元外,更为核心的是根据现场监测数据得出可行、实时的控制策略实现对矿井胶轮车辆的自动调度功能[4]。
2 胶轮车辆自动调度控制策略的设计
胶轮车辆自动调度控制策略设计的主要依据为与其相关的运行和调度的规则。因此,本节首先对胶轮车辆运行相关的规则进行研究,而后设计相应的控制策略。
2.1 胶轮车辆安全行驶原则
为避免现场胶轮车辆的追尾、冲撞顶牛事故的发生要求控制策略能够避免多辆车辆进入同一个区段;要求系统能够对同一个区段或躲避点处的车辆信息进行检测。
2.2 胶轮车辆是否能够进入区段的判定规则
结合胶轮车辆在现场的工作任务,并总结为如下四种情况:
1)当现场一台基站检测到一辆胶轮车时,默认现场仅有的一辆胶轮车辆位于该基站;
2)当相邻基站也检测到胶轮车辆,说明胶轮车辆正在向该基站方向运行;
3)当胶轮车再次被1)中的基站检测到,说明在检测间隔的时间段内胶轮车辆并未运行;
4)在连续运行工况下,胶轮车辆未被其他基站识别,说明胶轮车辆一直在该区段且运行方向不变[5]。
2.3 胶轮车辆控制规则
在上述监测结果的基础上,控制策略的设计必须按照车辆控制规则实现,具体如下:
1)只有在当前区段信号绿灯的情况下才可以保证通行;
2)在正常行驶情况下,不允许胶轮车辆在区段内随意掉头、倒车等操作;只能够在错车点完成掉头和错车等操作;
3)除非有特殊情况,否则不运行胶轮车辆在区段内随意停车;同时,区段内相邻车辆的间距不得小于10 m。
当胶轮车进入错车点时,其对应的控制规则如图3 所示:
如图3 所示,当胶轮车辆驶入错车点时,X1为绿灯意味着可继续前行;而C 方向的X3为红灯。因此,胶轮车只能左转进入B 向。同时,B 向和C 向的车辆不允许进入A 向,实现两个区段的逆向封锁,保证其安全。

图3 错车点控制规则
2.4 控制策略流程设计
基于上述控制规则,并充分结合现场运输状态,充分考虑如下要求完成控制策略的设计:
1)要求胶轮车自动调度控制系统首先对有车和无车情况进行检测,有车包括双车或单车情况;
2)监测数据通过上行通道传至上位机和数据处理器;控制策略信号通过下行通道传至现场设备;
3)当系统出现故障时应能够及时识别,并实时作出动作保证整体的安全性。
设计如图4 所示的控制策略流程:
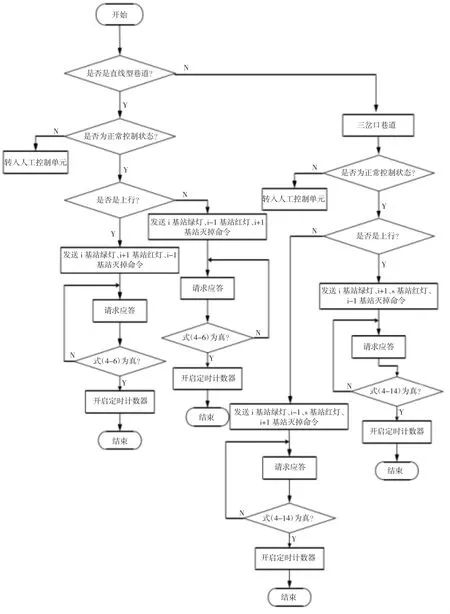
图4 胶轮车控制流程
3 结语
胶轮车为煤矿的辅助运输设备之一,其担负着矿井的运输任务,进而影响煤矿整体运输效率和生产效率。为解决传统矿井胶轮车在实际控制中出现延时、安全性低以及事故频发的问题,本文设计胶轮车自动调度控制系统并对整个控制系统进行调试并总结如下:
1)结合矿井巷道实际情况对现场的走向、红绿灯以及无线接收装置进行合理布置;
2)当整个自动调度控制系统通电后,系统上位机监控软件、数据监测软件等均可正常运行;
3)将无线发射装置安装于胶轮车上,随着胶轮车的运行上位机所接收的信号可实时反映其运行状态;
4)分别在直线巷道和三岔口巷道工况下验证控制策略的控制效果,得出整个控制策略是正确的、严谨的。
猜你喜欢
机械管理开发(2022年10期)2022-11-12
云南画报(2021年11期)2022-01-18
山东煤炭科技(2020年6期)2020-07-07
机械管理开发(2020年4期)2020-06-10
商品与质量(2019年12期)2019-12-19
煤炭工程(2019年1期)2019-02-19
铁道通信信号(2018年8期)2018-11-10
铁道通信信号(2018年8期)2018-11-10
科学与财富(2017年30期)2018-01-01
铁道通信信号(2016年4期)2016-06-01
