
潜艇与UUV协同作战发展现状及关键技术
2021-11-08 05:06张鑫明韩明磊余益锐黄田力
水下无人系统学报 2021年5期
张鑫明, 韩明磊, 余益锐, 黄田力, 陈 谦, 吴 铭
潜艇与UUV协同作战发展现状及关键技术
张鑫明, 韩明磊, 余益锐, 黄田力, 陈 谦, 吴 铭
(中国舰船研究院, 北京, 100101)
潜艇和无人水下航行器(UUV)协同作战是现代海军作战能力的重要组成部分, 也是海军装备中新式作战理念、新技术应用最为广泛的领域。文章介绍了国内外潜艇与UUV协同作战研究的发展现状, 主要分析了美国、俄罗斯和英国等国家在水下作战体系、协同作战系统和新质水下作战力量等方面的发展思路; 重点研究了水下协同作战的关键技术, 涉及水下多介质传输、网络化协同探测、多源异构信息融合等装备体系技术, 以及控制体系结构、协同任务规划与分配、贫弱信息下的自主决策等作战应用技术, 以期为装备技术和作战应用协调发展、水下新质作战力量的快速形成提供技术参考。
潜艇; 无人水下航行器; 协同作战
0 引言
随着水下无人系统技术的快速发展, 未来水下战的形态将更加多样化, 传统以单一平台为核心的对抗模式将逐渐丧失优势, 未来海上战争将以体系对抗为主, 其作战模式的主要特点是体系化、无人化、智能化、分布式和集群化[1]。加快构建以平台为中心的水下作战体系, 并作为作战网络节点参与陆、海、空、天、潜的跨域作战体系, 形成与强敌在海上体系对抗中的相互制衡, 同时大力发展水下隐蔽攻击等非对称作战样式, 对提升我国海军整体作战效能、形成非对称作战优势具有重要的军事意义。
潜艇和无人水下航行器(unmanned undersea vehicle, UUV)组成的异构协同作战系统, 是水下作战体系的核心部分。其以各类功能型UUV无人系统为前出力量, 以潜艇为后方遥控指挥及远程打击核心, 通过水下或跨域通信进行信息传输和指挥控制, 可充分发挥UUV的“倍增器”效能, 大幅提升潜艇综合作战能力, 并可降低舰艇装备损失和人员伤亡。潜艇和UUV协同作战, 既可发挥人的决策经验优势, 又可发挥无人平台的机动自主能力, 将成为未来水下作战的主要样式。
1 国内外研究现状
1.1 美海军水下作战体系和协同作战系统
美海军的水下作战体系建设处于世界领先水平。为了应对前苏联不断增长的潜艇威胁, 美海军从1949年起先后开始了固定式水下监视系统(sound surveillance system, SOSUS)、固定式分布系统(fixed distributed system, FDS)和先进可部署系统(advanced deployable system, ADS)等3项水下固定监视系统和舰载监视拖曳阵传感器系统(surveillance towed array sensor system, SURTASS)的研制工作, 构建了“固定与机动相结合”的综合水下监视系统(integrated undersea surveillance system, IUSS), 大幅提高了美海军的体系化反潜能力[2]。随着遥控声呐水声调制解调器技术的快速发展和海底无线通信网络技术的逐步成熟, 美海军从1994年起又推动发展了可部署自主分布式系统(deployable autonomous distributed system, DADS)、广域海网(Seaweb)和濒海水下持续监视网(persistent littoral undersea surveillance network, PLUSNet)等多个项目, 基本建成了“以力量网(ForceNet)为核心”、“有人与无人相结合”、“多域协同”的网络化水下作战体系, 以期在水下攻防中获得不对称优势。
DADS由美国海军研究办公室(office of naval research, ONR)资助, 在1994年由空间与海战系统司令部(space and naval warfare systems command, SPAWAR)和洛克希德马丁公司等多家公司和院所共同研发[3]。DADS是一套由14个固定节点和多个移动节点组成的濒海防雷反潜作战项目。其中固定节点包括2个传感器节点、2个浮标网关节点和10个遥控声呐中继节点, 潜艇、自主水下航行器(autonomous undersea vehicle, AUV)和蛙人等充当移动结点。岸基指挥中心通过固定网关节点和AUV移动网关节点获取水下态势数据, 并通过网关节点与其他移动节点进行通信, 从而实现对敌反潜作战[4]。
Seaweb由ONR资助, 在1995年由海军研究生院(naval postgraduate school, NPS)等多家高校和院所开始联合研制[5], 是一种具有通道自适应、情境自适应、自我配置和自我修复功能的自主海底水声网络系统。该网络系统以水下远程声呐调制解调器为固定节点, 以舰船、潜艇、飞机、卫星或岸基为指挥节点, 并以潜艇或AUV为水下移动节点。该系统以固定节点为中继, 向移动节点提供多域网络接口和来自指挥节点的指挥、控制、通信和导航(command, control, communications, and navigation, C3N)信息。Seaweb的成功部署推动了跨系统、跨平台和跨任务的水下反潜体系发展[6]。
PLUSNet由ONR资助, 在2005年由华盛顿大学等多个高校和公司开始联合研发, 是一种半自主控制的“海底固定+水中机动”的网络化系统设施。该系统以俄亥俄级战略核潜艇为母船, 以多型UUV/AUV为活动节点, 并以水下潜标、浮标和水声探测阵为固定节点。潜艇通过携带半自主传感器的UUV实施水下反潜、水面目标攻击等任务, 为水下作战提供支撑, 其项目部署如图1所示。该项目的试验系统分别于2006年和2007年进行第1次和第2次海上试验, 并于2015年形成作战能力[7]。

图1 PLUSNet项目部署示意图
美海军在持续推进水下攻防体系建设的同时, 还重点发展了包含分布式敏捷猎潜(distributed agile submarine hunting, DASH)系统和移动舷外保密通信与方法(mobile offboard clandestine com- munications and approach, MOCCA)在内的多种协同作战项目, 成立了“UUVRON 1”部队, 初步具备了潜艇与UUV协同作战的能力, 并持续通过2016年和2019年等年度先进海军技术演习(advanced naval technology exercise, ANTX)对协同作战能力进行了验证。
DASH项目由美国国防高级研究计划局(de- fense advanced research projects agency, DARPA)在2010年提出[8], 旨在研发能够在浅水和深水环境中大面积探测和定位柴电潜艇的先进无人系统感知能力, 以对抗安静型潜艇的不对称优势。该系统由可靠声学路径转换系统(transformational reliable acoustic path system, TRAPS)和潜艇风险控制系统(submarine hold at risk, SHARK)组成, 前者是用于大面积覆盖和探测潜艇的海底被动式声呐节点, 后者是用于发现后跟踪潜艇的搭载主动声呐的UUV。DASH首创自下而上的探潜模式, 可克服海面、海底声散射的影响, 能发现并跟踪大片区域的潜艇。该项目在2013完成了SHARK系统的深潜试验, 并于2017年完成验收[9]。
MOCCA项目由DARPA在2016年1月提出, 旨在寻求研发突破性潜艇声呐概念与技术。该项目以主动声呐和被动声呐相互补充为核心思路, 通过研究潜艇与搭载主动声呐的UUV间的保密通信技术、协同探测和追踪技术, 实现潜艇与UUV的协同作战[10]。该项目在低截获率和低检测率的保密通信信号方面取得突破, 其原型系统已集成在潜艇舰载声呐系统中, 并于2020年完成验收[11]。
美海军在2016年8月于纽波特市的水下声学实验室举行主题为“跨域指挥、控制与通信(command, control and communications, C3)”的年度海军技术演习(ANTX 2016), 展示了通用动力公司研制的“潜艇-UUVs-UAV”子母式协同作战能力。该演示通过潜艇发射携带子UUV和UAV的母UUV, 实现跨域C3以及母平台(潜艇)对二级子平台(小型UUV)的直接指挥[12], 其具体指控关系如图2所示。
“UUVRON 1”部队在2017年9月正式组建, 成为美国海军历史上第1支UUV战斗单位。根据美海军的设想, 该部队将具备在无人协助的情况下长时间操作和使用全级别无人水下航行装备的能力, 能够配合有人平台进行探测侦察等战术行动, 并对战略海洋学检测和战区反潜战原型系统等提供情报支持[13]。
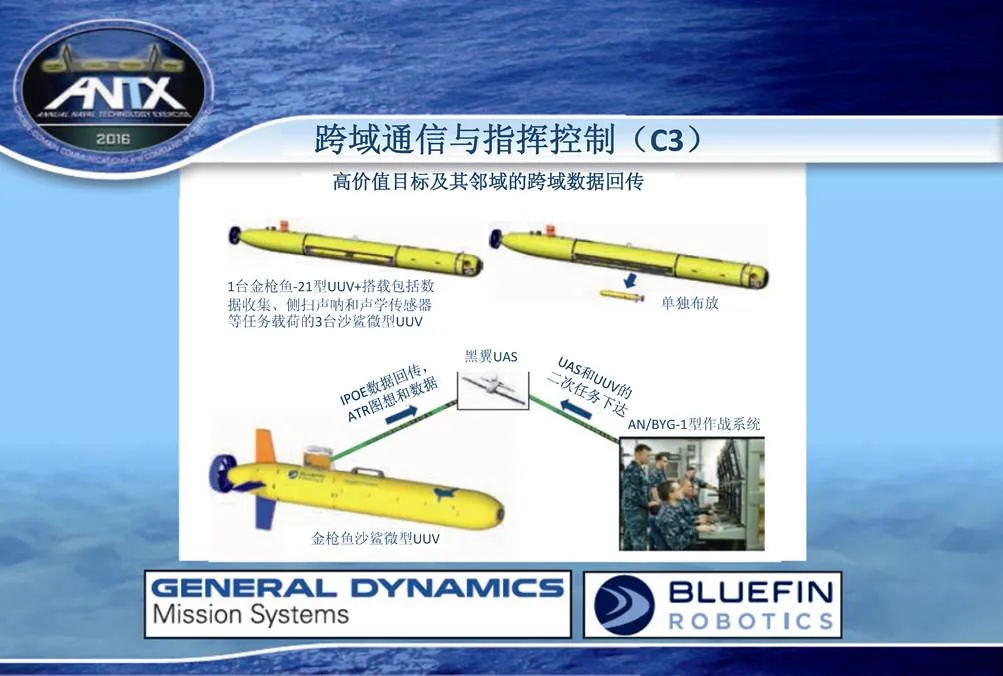
图2 “潜艇-UUVs-UAV”子母式协同作战中通信和指控关系示意图
美海军在2019年8月于纽波特市的水下声学实验室举行了主题为“准备作战: 水下安全”的年度海军技术演习(ANTX 2019), 展示了通用动力公司的“有人-无人系统跨域C3和多层级C3能力”。该演示通过两栖戒备小组(ARG)对搭载无人水面航行器(unmanned surface vehicle, USV)的濒海战斗舰和搭载UUV的弗吉尼亚级潜艇进行集中指挥, 实现了海上多有人平台与多无人平台的协同探测和打击, 构建了多层级任务指挥结构[14]。
此外, 美国国防部(department of defense, DoD)、美国国防科学委员会(defense science board, DSB)、美国海军部(department of navy, DON)、美国海军水下作战总体技术办公室(undersea warfare chief technology office, USW CTO)、美国海军潜艇部队司令部(commander submarine forces, COMSUBFOR)和美国战略预算评估中心(center for strategic and budgetary assessments, CSBA)等多家机构还发布了许多诸如第2版《无人水下航行器主计划》[15]、《水下战纲要》[16]、《下一代水下无人系统》[17]、第3版《水下战科学与技术目标》[18]、第2版《水下战科学与技术战略》[19]、第8版《无人系统综合路线图》[20]、《海军无人系统目标》[21]、《海军无人系统战略路线图》[22]、《水下战新纪元》[23]和《海军无人作战框架》[24]等纲要性文件。这些文件与项目、演习相结合, 分别从任务使命需求、总体战略规划、核心技术梳理、关键系统研发和作战技术演习这5个层面推动美海军水下有人-无人协同作战技术和水下作战体系的研究与发展。
1.2 俄罗斯海军新质水下作战力量
俄罗斯自2008年开始实施第3轮名为“新面貌”的军事改革, 力求让各兵种力量焕然一新。根据俄国防部制定的海军改革方案, 俄海军在裁员的同时将装备8艘战略核潜艇、12艘常规潜艇和41艘水面舰艇, 并推进新型UUV的研制与列装, 以此重振俄海上力量。
俄海军北方舰队在2018年1月将其第29潜艇旅重组为“深水师”, 旨在聚焦先进水下武器平台的试验和新型装备的研发。该师目前拥有包括“卡沙洛特”、“帕尔图斯”和“卡利特卡”在内的多种小型深水核动力工作台及具有运载功能的“波德莫斯科维”号核潜艇。根据俄海军计划, “贝尔戈罗德”号核潜艇也将入列该“深水师”, 成为“深水师”的又一利器[25]。
“波塞冬(2M39)”号核动力UUV(自主核鱼雷)在2018年3月于普京发表的国情咨文中被正式提出。该型UUV是一种带有热核弹头或常规载荷的高速核动力洲际自主水下航行器, 能够在距离目标数千英里外由母艇发射, 可自主导引和避障, 且难以拦截, 预计将在2027年服役[26]。2019年7月, 俄罗斯新型特种核潜艇“贝尔格罗德”号亮相。该型潜艇先按949A“安泰”级方案铺设龙骨, 后按09852新方案进行升级, 将具备搭载和运送6枚“波塞冬”核鱼雷和1艘“大键琴”UUV的能力, 具体布局如图3所示。根据俄海军的计划, “贝尔格罗德”在2021年上半年将继续进行服役之前的各种试验, “哈巴罗夫斯克”号特种核潜艇在改装完成后将成为第2艘“波塞冬”运载艇[27]。
可以预见, 随着深水部队的成立以及“波塞冬”号核鱼雷的服役, 俄海军将拥有水下有人-无人协同核威慑和深水UUV隐秘水下核打击等非对称作战样式, 从而显著提升俄海军的整体作战效能。

图3 搭载“波塞冬”核鱼雷和“大键琴”UUV的“贝尔格罗德”号巡航导弹核潜艇布局图
1.3 英国海军水下作战体系构想
英皇家海军海上项目规划团队(maritime enterprise planning group, MEPG)在2020年12月发布了一份详细阐述“亚特兰蒂斯2040”概念的文档[28], 构想了一种使用半自主潜艇作为母艇,利用远程、自主和无缆水下平台协同作战的混合水下能力。这些有人-无人平台协同作战, 共同构建了网络化的水下战空间。
“亚特兰蒂斯2040”主要兵力构想如图4所示, 其目标是构建包含如下作战能力的水下战体系布局:
1) 半自主潜艇提供发射下一代轻型和重型鱼雷以及自主扫雷的能力, 能够将UUV部署到其他平台无法到达的位置;
2) UUV提供遥感、反潜战(anti-submarine warfare, ASW)屏障和区域拒止的能力;
3) 超大型UUV或XLUUV提供远程水下作战的能力;
4) 水下滑翔机具备环境分析的能力;
5) 近地轨道卫星充当水下平台与水面平台的通信中继节点。
表1梳理了近年来外军在潜艇与UUV协同作战方面的项目, 可以看出, 美国与俄罗斯在潜艇与UUV协同作战的理念与装备研制方面走在前列。美国更注重体系建设, 在“空、海、陆、天、网”实施跨域作战, 并不断加快水下作战的理论与技术创新, 大力发展以UUV为主体的水下作战无人装备。而俄罗斯则大力发展“贝尔戈罗德”核潜艇、“波塞冬”核鱼雷等杀手锏式的新质作战力量。
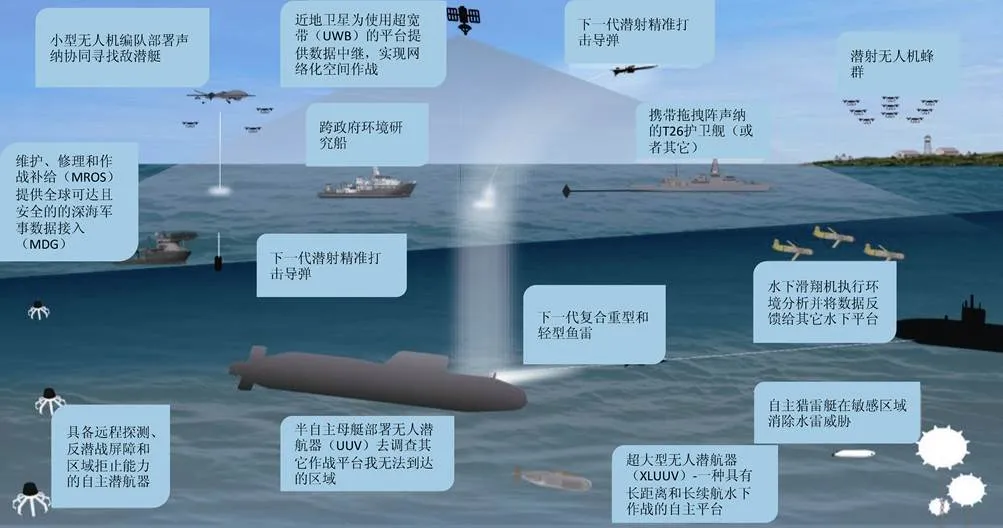
图4 “亚特兰蒂斯2040”项目构想图
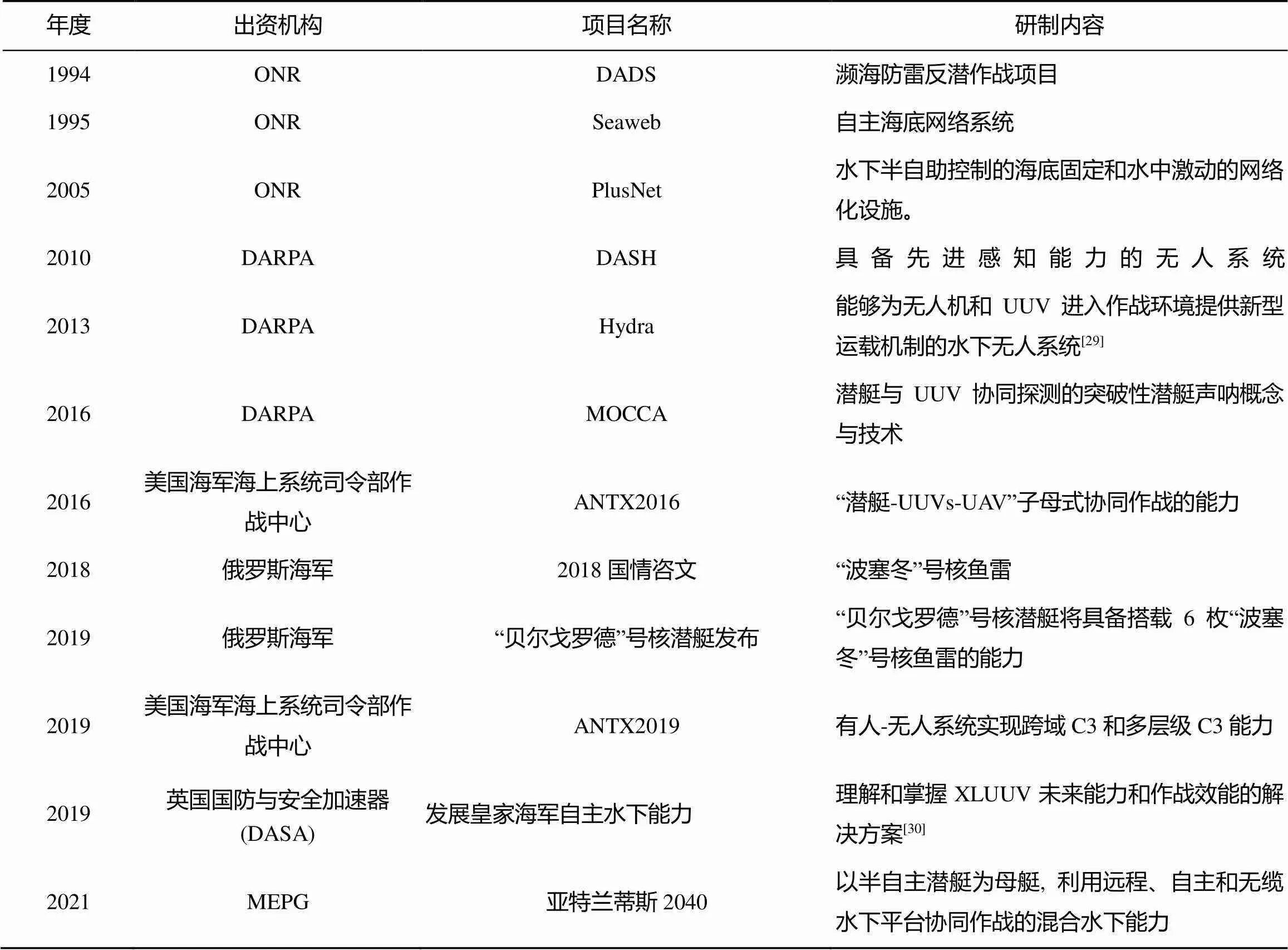
表1 国外潜艇与UUV协同作战典型研究项目
1.4 国内研究现状
从公开资料看, 国内对UUV与潜艇的协同作战以理论研究居多。陶伟等[31]分析了水下有人-无人集群的传统控制结构, 并基于DARPA的马赛克战概念提出了新的接替式控制结构。吴超等[32]对有人与无人平台协同侦察、反潜、反舰和布雷4种典型运用方式进行深入探讨, 为未来海战场“平台无人、系统有人, 前线无人、后方有人, 行动无人、指控有人”的新型作战样式设计提供参考。王圣杰等[33]提出将人的智能引入智能 UUV 编队, 形成一种潜艇与智能 UUV 结合的协同系统, 能够有效地实现避障并能躲避突发威胁, 具备应急能力。随着理论研究的逐渐深入以及UUV研制和列装的逐步推进, 国内潜艇与UUV的协同作战将获得长足发展。
2 关键技术分析
潜艇与UUV协同作战是多学科交叉、融合的综合系统, 以能源动力、自主控制、载荷设计、减振降噪(艇)等单平台技术为基础, 以协同探测、组网通信、传感信息融合等多平台集群技术为支撑, 以作战模式设计、作战任务分配、指挥流程控制等作战技术为牵引, 最终实现遂行特定作战任务的目标。
文中重点研究了潜艇与UUV协同作战装备技术中存在的较大难点和创新性强的前沿技术, 并对以作战应用为目标的相关作战应用技术进行了探讨, 对基础支撑性技术也进行了简述。装备技术中的短板和热点主要在水下组网通信技术和网络化协同探测技术, 包括以水声为主的多介质传输、自组织组网与保密通信、异构多源传感信息融合、多目标协同跟踪等; 作战技术中的短板和热点主要在作战样式设计和分布式智能协同指挥控制, 包括作战任务与样式设计、控制体系结构、协同任务规划与分配、贫弱信息下的自主决策等, 基础支撑性技术包括编队集群控制、UUV布放和回收等, 如图5所示。
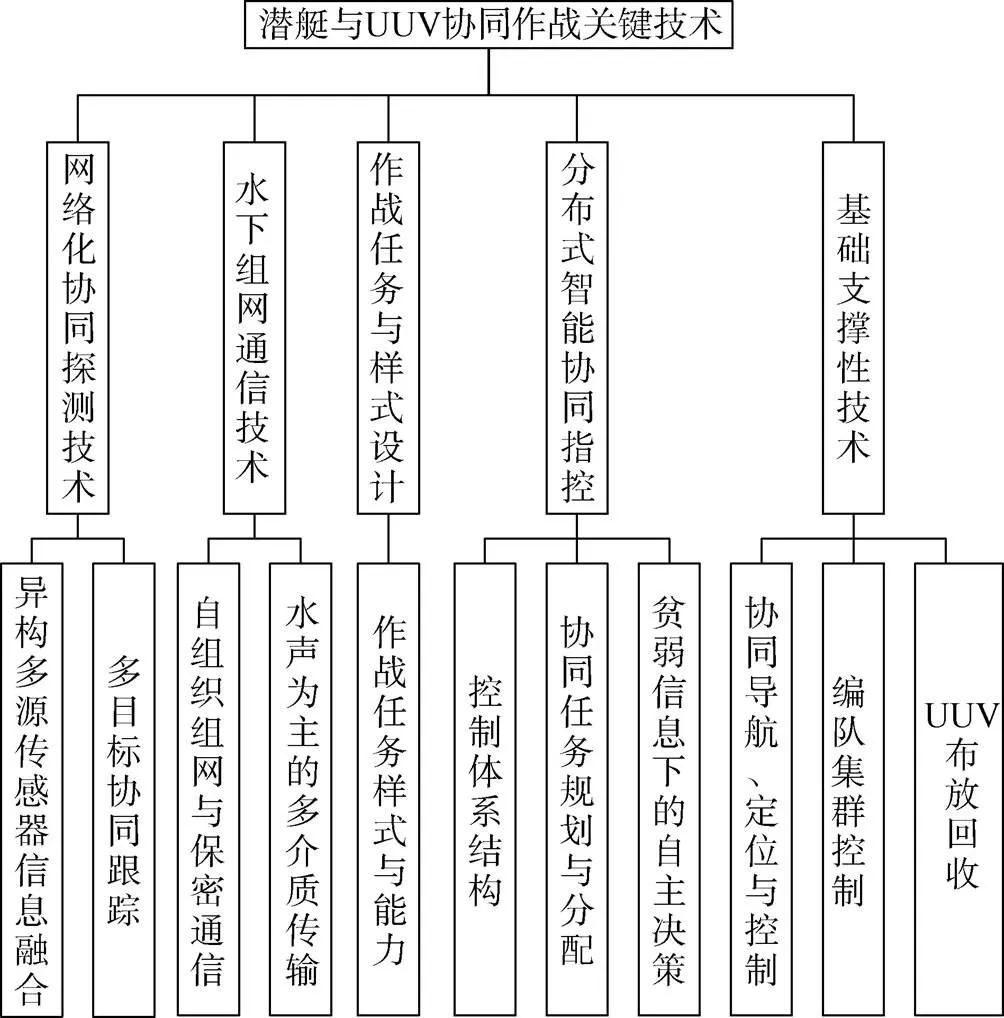
图5 潜艇与UUV协同作战关键技术体系图
2.1 水下组网通信技术
2.1.1 以水声为主的多介质传输
在潜艇与UUV协同中, 数据传输应用于潜艇与UUV之间以及UUV集群内, 各型信息对于传输要求差异较大。潜艇和UUV之间传输的主要为作战指令型信息, 对实时性和可靠性要求高,UUV集群内传输则以探测信息为主, 需要传输的数据量大。当前水下通信以水声通信为主, 虽然传输距离较远但具有时延长、带宽窄、速率慢的特点(10 km、10 kb/s量级), 需要大力发展补充手段, 形成稳健可靠的通信链路。如水下蓝绿激光通信、水下临时光纤通信网(tactical undersea network architecture, TUNA)、特低频机械天线(a mechanically based antenna, AMEBA)技术等。Hydromea公司设计开发了微型水下光学WIFI系统“LUMA”, 研制了超灵敏光电探测器, 利用蓝绿激光低损耗窗口, 已实现50~100 m的10 Mb/s光学无线通信[34]。TUNA系统通过研制特殊光纤电缆和浮标技术, 以期在战场环境下实现用光纤网替代无线射频战术数据网络, 其相关技术前沿如华盛顿大学应用物理实验室研制的自部署波浪能浮标和住友电气工业株式会社研制的无锗硅芯光纤[35]。美国SLAC国家实验室、加州大学洛杉矶分校等机构分别研制了铌酸锂压电晶体[36]、压电和磁性串联多铁特性等机械天线[37]。
2.1.2 自组织组网与保密通信
对于潜艇与UUV协同, 为提高编队通信效率, 提升网络通信容量, 进行拓扑机动适变, 实现安全可靠的指挥控制, 需要加强对水下自组网和保密通信的研究。美欧等对水下组网通信和编队作业等方面展开深入研究并进行了一定的试验。Schneider等[38]针对多AUV 快速环境感知的任务需要, 设计了一种新网络协议, 采用新的MAC层处理信道中的各种数据包状态, 组建动态拓扑水声通信网络。Kalwa[39]对面向多UUV编队结合信息交互过程的分层通信结构进行了设计, 处理通信中出现的延迟、信息损失、水声信号发散等情况。同时, 由于侦收技术敌强我弱, 为保障指控信息安全, 还需要大力发展保密通信技术, 研究低截获率和低检测率的水声通信信号或是其他通信手段。我国在量子保密通信方面处于领先水平, 上海交通大学团队已完成世界首个海水量子通信试验, 国内有关团队对水下量子密钥分配的误码率和成码率进行了理论分析[40], 可信的通信距离和速率虽然还仅为100 m级和100 b/s量级, 但随着理论和技术的进步, 将有广阔的水下军事应用前景。
2.2 网络化协同探测技术
2.2.1 异构多源传感信息融合
潜艇与UUV组成的有/无人系统集群进行协同探测, 探测平台可以是潜艇或UUV, 探测手段包括声、光、电、磁、热尾流以及重力场等[41], 其感知信息具有多源性、异构性、非完备性和不确定性的特点。使用融合后的数据可以全面地得到目标的多维度信息, 提升对目标检测、识别和跟踪探测的性能, 但存在非同源信息融合置信度冲突等问题。解决异构融合的问题核心在于融合算法, 当前异构多源传感信息融合算法可概括为随机和人工智能两大类, 随机类方法有加权平均法、卡尔曼滤波法、多贝叶斯估计法以及Demp- ster-Shafer(D-S)证据理论等; 而人工智能类方法则有模糊逻辑、神经网络、粗糙集理论以及专家系统等。D-S证据理论作为表征不确定、非完备、大差异性信息的重要理论, 其与神经网络和模糊理论等人工智能类方法的融合是当前技术发展热点方向之一[42]。另一个方向则是基于深度学习框架, 与大数据技术结合, 构建相应的模型框架和数据集等, 对数据进行深层次的挖掘, 实现特征提取[43]。
2.2.2 多目标协同跟踪
水下平台在跟踪目标特别是非合作性目标时往往会遇到复杂的多目标环境, 例如敌方释放诱饵进行诱骗等。为实现多目标协同跟踪需要对多目标进行跟踪任务分配, 并通过多源信息融合实现对单目标的稳定跟踪。在潜艇与UUV协同时, 可以采用目标优化分配的方法, 对于高优先级目标, 设计合理的编成和拓扑进行协同跟踪, 对于低优先级目标可派简单功能型UUV进行跟踪。在对单目标进行稳定跟踪时, 需要解决数据配准、数据关联和数据融合等问题。分布式融合滤波算法是解决上述问题的重要方法之一, 分布式融合滤波算法无需建立中心节点, 每个节点只需要和相邻节点进行数据交互, 通过设计一致性协议, 每个节点能够得到一致的滤波值, 现有研究包括分布式卡尔曼滤波、贝叶斯一致性滤波、H-infinite分布式滤波算法等[44]。同时还可针对真实环境中存在信息传输时延、网络拓扑变换、通信带宽限制等问题对分布式滤波算法进行优化[45]。
2.3 作战任务与样式设计
在空中, 以无人机为代表的智能化分布式协同作战快速发展, 已成为行之有效的作战模式[46]。而在水下, 对于潜艇与UUV的协同作战, 智能化分布式协同也是其发展的必然方向, 但因使命任务及战场环境的不同, 其作战具有特殊性。针对水下作战可能面临的不确定威胁以及多样化任务[47], 如反水雷战、反潜战、水下体系对抗、突破岛链、要域封控等, 要开展军事威胁分析, 对潜艇与UUV协同作战样式、潜艇与UUV协同作战能力需求量化进行研究, 依据作战任务创新协同作战样式、交战策略和战术战法, 并构建作战能力需求及效能评估指标体系。特别是针对美国提出的水下蜂群等颠覆性作战样式, 可通过想定场景、作战流程和作战规则进行推演和对抗, 从而生成应对策略, 并以创新作战理论、战法设计为导向牵引装备和技术的发展。
2.4 分布式智能协同作战理论
2.4.1 控制体系结构
随着作战任务和作战样式的确定, 控制体系结构和控制模式就成为了关键问题。潜艇与智能UUV 编队指挥控制系统是一个人机结合的智能系统, 并不仅由潜艇集中完成, 而是在潜艇具有有限的中央控制权的前提下由潜艇和智能UUV 协同完成具有层次型的指挥控制结构。成熟的协同控制系统包括集中式控制和分布式控制2种方式。集中式控制具有良好的全局控制能力, 但控制缺乏鲁棒性, 且对通信依赖较大, 难以对环境态势的变化做出及时有效的反应。分布式控制没有中央控制节点, 具有良好的容错性和鲁棒性, 但是对全局态势把握不充分。发展的方向是集中式控制与分布式控制相结合的集散式控制, 一种典型的集散式控制模式如图6所示。该模式由中央控制节点(有人)和具有半自主决策能力的分布式节点(无人)组成, 在保证关键决策由中央节点做出的同时, 赋予分布式节点最大的自主决策能力。随着战局的演化, 控制体系结构也会随之调整, 存在协同过程中指控权的动态分配等问题, 实现的关键是要对任务流分解并分配相应的指挥权, 实现指挥控制的自动化甚至智能化[32]。

图6 潜艇与UUV协同集散式控制方式拓扑图
2.4.2 协同任务规划与分配
在多模态的控制体系结构下, 需要对协同任务解析、协同要素生成、协同优先级排序以及协同行动规划等关键技术理论展开研究[48]。对于潜艇与UUV协同, 为实现基于人机融合智能的动态任务规划, 实现面向群体智能的自适应指挥控制能力, 需要解决的一个重点问题是分布式任务分配, 即在实现各技战术指标的前提下, 根据作战目标状态和战场态势实时将任务分配给各作战智能体, 使得整个作战收益最大, 付出代价最小[49]。在潜艇与UUV编组较小时, 任务分配相对简单, 但如采用水下蜂群类作战样式时, 该问题会突显。分布式任务分配的一类方法是建模, 典型模型主要有多智能体(Agent)决策理论、市场机制(合同网/竞拍)、分布式马尔科夫以及分布式约束等, 且已在无人机领域得到广泛应用。另一类方法则是利用智能类算法, 如遗传算法和蚁群算法等。通过这些技术的发展应用, 最终实现智能控制和决策, 形成相互统一, 时空一致, 任务优化的自同步、自协同, 实时分配任务的方案。
2.4.3 贫弱信息条件下的自主决策
当前UUV 的智能水平有限, 各节点态势自主觉察、态势自动生成、态势互理解能力弱, 不能像空中无人作战一样获得全域的综合精准态势, 并且潜艇在与UUV协同时, 为保障安全, 往往处在较远的安全区域, 而水下通信存在长时延、低带宽、弱联通的特点, 通信链路不一定能满足指控时敏性要求。在这种态势和指控信息贫弱的条件下, 很难实现统一集中指挥, 需要加强智能UUV的自主决策能力, 研究适于UUV自主决策的指挥控制指令集、自主决策能力构建、对混合信息的多属性决策等问题[50]。随着人工智能技术的发展, 特别是人工智能在军事博弈对抗方面应用的逐渐深入, 也应创新传统水下作战方式, 由按提前规划的方案统一实施、装订执行, 逐渐向一体化规划、分布式自主实施转变。
2.5 基础支撑性技术
2.5.1 协同导航定位
导航定位的精度和准度将直接影响执行任务的质量和效率。协同导航在单平台导航定位的基础上, 强调传感器信息间的判断和决策, 包含有/无中心导航定位2种方式: 1) 编队中少数平台携带高精度传感器, 并向系统中其他平台提供中心位置信息和相对位置信息; 2) 编队中所有潜艇和UUV携带相同的高精度传感器, 并不断相互通信获得系统中其他位置信息。有中心的导航定位方式算法结构复杂, 需要通过中心位置信息求解得到自身位置信息, 具有低成本和高延迟的特点。无中心的导航定位方式算法结构简单, 但由于装有大量高精度导航设备, 具有高成本和低延迟的特点[51]。
2.5.2 集群编队控制
为了满足任务的需要和保持通信的稳定, UUV集群必须通过对编队构形的控制来保持系统各节点的相对稳定, 以实现如协同探测、协同跟踪和协同导航等群体功能。目前常用的编队方法包含领航者−跟随者法、基于行为法、人工势场法等[52-53]。领导者-跟随者法通过指定某一UUV为领导者, 再让其他UUV以设定的固定距离和方向跟踪领导者, 从而实现队形控制。行为法将UUV的编队控制看作一系列行为的组合, 通过分析各UUV的预期行为并加权, 使得编队中各UUV能够根据环境或其他UUV行为得出最优行为结果。人工势场法在集群控制中引入势能函数, 通过将编队中的某些变量用引力函数和斥力函数表示, 使得UUV根据函数求解结果保持编队构形。
2.5.3 UUV布放回收
艇载UUV布放回收发生在任务完成前后, 是任务过程中最容易暴露的节点。UUV布放回收分为水上作业和水下作业。水上作业是指母船利用机械臂或起重机抓取UUV, 从而实现其布放和回收。水下作业主要通过潜艇搭载UUV实现, 包括坞舱式、背负式、鱼雷管式和导弹管式等方式。国外先进潜载UUV 技术发展的关键在于研究先进的传感器技术、通信导航控制技术以及UUV 综合技术等方面, 这些技术的发展有效促进了导引和捕获技术的改进, 大大提高了UUV布放回收的成功率[54]。
3 结束语
潜艇与UUV协同的作战系统, 可以大大提高潜艇战斗性能, 提高自身在与敌方潜艇、水面与空中力量对抗中的生存与获胜概率, 对海上作战方式和理念产生了革命性的影响, 当今各军事大国都在加紧研制和开发。我国与世界军事强国相比, 还有一定差距, 尚需持续加强体系化建设, 并加大对集群智能、大数据、量子保密通信等新技术的研发和应用。同时, 要以作战需要和技术创新为双牵引, 加大军队单位、科研机构、高等院校、工业部门的协同, 制定切实可行的发展规划、技术路线, 加速形成新质作战力量。
[1] 钟宏伟. 国外无人水下航行器装备与技术现状及展望[J]. 水下无人系统学报, 2017, 25(3): 215-225.
Zhong Hong-wei. Review and Prospect of Equipment and Techniques for Unmanned Undersea Vehicle in Foreign Countries[J]. Journal of Unmanned Undersea Systems, 2017, 25(3): 215-225.
[2] Whitman E C. SOSUS: The “Secret Weapon” of Undersea Surveillance[J]. Undersea Warfare. 2005, 7(2): 436.
[3] Department of the Navy. Definitive Contract WD10H 199409DN6600194C6023[EB/OL]. Federal Contract Aw- ard. [1994-09-15]. https://govtribe.com/award/fedeal-con- tract-award/definitive-contract-wd10h199409dn6600194c6023.
[4] Hatch M D, Kaina J L, Mahler R P, et al. Data Fusion Methodologies to Support Theater Level and Deployable Surveillance Systems[C]//Conference Record of Thirty- Second Asilomar Conference on Signals, Systems and Computers. Pacific Grove, CA, USA: IEEE, 1998, 1: 563- 567.
[5] Rice J A. US Navy Seaweb Development[C]//Proceedings of the Second Workshop on Underwater Networks (WuWNet'07). Association for Computing Machinery. Montreal, Quebec, Canada: ACM, 2007.
[6] Rice J A, Creber R K, Fletcher C L, et al. Seaweb Underwater Acoustic Nets[R]. San Diego, USA: Biennial Review 2001, SSC San Diego Technical Document TD 3117, 2001: 234-250.
[7] Stewart M S, Pavlos J. A Means to Networked Persistent Undersea Surveillance(U)[C]//Submarine Technology Sy- mposium Session V. Stewart. British Columbia, Canada: STS, 2006: 16-18.
[8] 董晓明. 海上无人装备体系概览[M]. 哈尔滨: 哈尔滨工程大学出版社, 2020: 225-337.
[9] DARPA. Department of Defense Fiscal Year(FY) 2018 Budget Estimates[EB/OL]. [2017-05-01]. https://www. darpa.mil/attachments/DARPA_FY18_Presidents_BudgetRequest.pdf.
[10] DARPA. Mobile Off-board Clandestine Communications and Approach(MOCCA)[EB/OL]. Broad Agency Announcement. [2016-01-24]. https://govtribe.com/opportu- nity/federal-contract-opportunity/mobile-off-board-clandestine-communications-and-approach-mocca-darpabaa1610.
[11] DARPA. Department of Defense Fiscal Year(FY) 2021 Budget Estimates[EB/OL]. Defense-Wide Justification Book Volume. [2020-02-02]. https://comptroller.defen- se.gov/Portals/45/Documents/de-fbudget/fy2021/budget_justification/pdfs/03_RDT_and_E/RDTE_Vol1_DARPA_ MasterJustificationBook_PB_2021.pdf.
[12] NAVSEA. Annual Naval Technology Exercise(ANTX) 2016 Overview[EB/OL]. [2016-08-16]. https://www. Nav- sea.navy.mil/Portals/103/Documents/NUWC_Newport/A-NTXdocs/ANTX%202016Summary_Distro%20AFinal.p- df?ver=2016-12-07-110753-347.
[13] AUVSI News. Navy Establishes First UUV Squadron, UUVRON 1[EB/OL]. [2017-09-29]. https://www.auvsi. org/navy-establishes-first-uuv-squadron-uuvron-1.
[14] NAVSEA. Annual Naval Technology Exercise(ANTX) 2019 Directory[EB/OL]. [2019-08-29]. https://www.nav- sea.navy.mil/Portals/103/Documents/NUWC_Newport/ANTdocs/ANTX19Directory.pdf?ver=2019-08-21-113113-900.
[15] Department of the Navy. The Navy Unmanned Undersea Vehicle(UUV) Master Plan[R/OL]. [2004-09-09]. https:// www.hsdl.org/?view&did=708654.
[16] Commander, Submarine Forces. Design for Undersea Warfare[R/OL]. [2012-09-10]. https://www.hsdl.org/?vi- ew&did=726701.
[17] The Defense Science Board. Next-Generation Unmanned Undersea Systems[R/OL]. [2016-10-12]. https://apps. dtic. mil/dtic/tr/fulltext/u2/1023641.pdf.
[18] Undersea Warfare Chief Technology Office. The Undersea Warfare Science & Technology Objectives[R/OL]. [2016- 07-23]. https://defenseinnovationmarketplace.dtic.mil/wp- content/uploads/2018/02/USW_ST_Objectives.pdf.
[19] Undersea Warfare Chief Technology Office. The Undersea Warfare Science & Technology Strategy[R/OL]. [2016- 05-23]. https://defenseinnovationmarketplace.dtic.mil/wp- content/uploads/2018/02/USW_Strategy.pdf.
[20] Department of Defense. Unmanned Systems Intergrated Roadmap(2017-2042)[R/OL]. [2017-06-13]. https://s3. D- ocumentcloud.org/documents/4801652/UAS-2018-Road- map-1.pdf.
[21] Department of the Navy. Department of Navy Unmanned Systems(UxS) Goals[R/OL]. [2018-01-11]. https://nps. edu/documents/105302057/105304195/ASN_RDA_SIGNED+DON+UxS+GOALS_2018.pdf/5452a9cb-f29f-4a4a-b493-fc3a75ca54e8.
[22] Department of the Navy. Department of the Navy Strategic Roadmap for Unmanned Systems[R/OL]. [2018- 05-29]. https://www.secnav.navy.mil/rda/Documents/DO N-Strategic-Roadmap-for-Unmanned-Systems.docx.
[23] Bryan Clark. The Emerging Era in Undersea Warfare[R/OL]. CSBA. [2015-01-22]. https://csbaonline. org/ uploads/documents/CSBA6292_(Undersea_Warfare_Re- print)_web.pdf.
[24] Department of the Navy. Department of Navy Unmanned Campaign Framework[R/OL]. [2021-03-16]. https://www. navy.mil/Portals/1/Strategic/20210315%20Unmanned%20 Campaign_Final_LowRes.pdf?ver=LtCZ-BPlWki6vCBTd gtDMA%3D%3D.
[25] Navy Naval Defense Industry News. Russian Northern Fleet Creates Submarine Division for Deep-Water Operations[EB/OL]. [2018-04-27]. https://www. navyrecognition.com/index.php/naval-news/naval-news-archive/2018/april-2018-navy-naval-defense-news/6169-russian-northern-fleet-creates-submarine-division-for-deep-water-operations.html.
[26] Kyle M. How Russia’s New Doomsday Torpedo Works [EB/OL]. [2018-03-07]. https://www.popularmechanics. com/military/weapons/a19160734/how-russias-new-doomsday-torpedo-works/.
[27] IndraStra. Russia Launches Belgorod Nuclear Submarine to carry Poseidon Underwater Drones[EB/OL]. [2019- 04-29]. https://medium.com/indrastra/russia-launches-bel- gorod-nuclear-submarine-to-carry-poseidon-underwater- drones-d49bda5287e3.
[28] Naval Technology. Royal Navy Details “Atlantis” Hybrid Underwater Capability[EB/OL]. [2021-04-06]. https:// www.naval-technology.com/news/royal-navy-details-atlantis-hybrid-underwater-capability/.
[29] DARPA. Hydra[EB/OL]. Broad Agency Announcement. [2013-08-22]. https://govtribe.com/opportunity/federal- contract-opportunity/hydra-darpabaa1339.
[30] DASA. Developing The Royal Navy’s Autonomous Underwater Capability[EB/OL]. Competition Document. [2019-6-6]. https://www.gov.uk/government/publications/ competition-developing-the-royal-navys-autonomous-un- der-water-capability/competition-document-developing-the-royal-navys-autonomous-underwater-capability.
[31] 陶伟. 基于马赛克战的水下有人-无人集群控制结构[J].指挥与控制学报, 2020, 6(3): 264-270.
Tao Wei. Control Structure of Underwater Manned and Unmanned Swarm Based on Mosaic Warfare[J]. Journal of Command and Control, 2020, 6(3): 264-270.
[32] 吴超, 杜辉, 何青海. 水下“有人/无人”作战平台协同运用方式探讨[J]. 舰船科学技术, 2020, 42(17): 153-156.
Wu Chao, Du Hui, He Qing-hai. Discussion on the cooperative use mode of underwater manned/unmanned combat platform[J]. Ship Science and Technology, 2020, 42(17): 153-156.
[33] 王圣洁, 康凤举, 韩翃. 潜艇与智能无人水下航行器协同系统控制体系及决策研究[J]. 兵工学报, 2017, 38(2): 335-344.
Wang Sheng-jie, Kang Feng-ju. Han Hong. Research on Control and Decision-making of Submarine and Intelligent UUV Cooperative System[J]. Acta Armamentarii, 2017, 38(2): 335-344.
[34] Hydromea. Hydromea Launches the Most Advanced Wireless Underwater Optical Modem LUMA X-the Future in Affordable High-Speed, Wireless Subsea Connectivity[EB/OL]. [2020-10-08]. https://www.hydromea.com/ 2020/10/09/hydromea-launches-the-most-advanced-wireless-underwater-modem-luma-x-the-future-in-affordable-high-speed-wireless-subsea-connectivity/.
[35] Tamura Y , Sakuma H , Morita K , et al. The First 0.14 dB/km Loss Optical Fiber and its Impact on Submarine Transmission[J]. Journal of Lightwave Technology, 2018, 36(1): 44-49.
[36] Kemp M A, Franzi M, Haase A, et al. A High Q Piezoelectric Resonator as a Portable VLF Transmitter[J]. Nature Communications, 2019, 10(1): 1715.
[37] Schneider J D, Domann J P, Panduranga M K, et al. Experimental Demonstration and Operating Principles of a Multiferroic Antenna[J]. Journal of Applied Physics, 2019, 126: 224104.
[38] Schneider T, Schmidt H.Unified Command and Control for Heterogeneous Marine Sensing Networks[J]. Journal of Field Robotics, 2010, 27(6): 876-889.
[39] Kalwa J.The GREX-project: Coordination and Control of Cooperating Heterogeneous Unmanned Systems in Uncertain Environments[C]//Oceans 2009-Europe. Bremen, Germany: IEEE, 2009.
[40] 张贺, 王申涛, 李海涛. 水下量子保密通信可行性分析[J]. 中国新通信, 2018, 20(8): 29-30.
[41] 程锦房, 张伽伟, 姜润翔, 等. 水下电磁探测技术的发展现状[J]. 数字海洋与水下攻防, 2019, 2(4): 45-49.
Cheng Jin-fang, Zhang Jia-wei, Jiang Run-xiang, et al. Development Status of Underwater Electromagnetic Detection Technology[J]. Digital Ocean & Underwater Warfare, 2019, 2(4): 45-49.
[42] 谢伟, 陶浩, 龚俊斌, 等. 海上无人系统集群发展现状及关键技术研究进展[J]. 中国舰船研究. 2021, 16(1): 7-17, 31.
Xie Wei, Tao Hao, Gong Jun-bin, et al. Research Advances in the Development Status and Key Technology of Unmanned Marine Vehicle Swarm Operation[J]. Chinese Journal of Ship Research, 2021, 16(1): 7-17, 31.
[43] Gao J, Li P, Chen Z, et al. A Survey on Deep Learning for Multimodal Data Fusion[J]. Neural Computation, 2020, 32(5): 829-864.
[44] 唐胜景, 史松伟, 张尧, 等. 智能化分布式协同作战体系发展综述[J]. 空天防御, 2019, 2(1): 6-13.
Tang Sheng-jing, Shi Song-wei, Zhang Yao, et al. Review on the Development of Intelligence-based Distributed Cooperative Operational System[J]. Air & Space Defense, 2019, 2(1): 6-13.
[45] Millan P, Orihuela L, Vivas C, et al. Distributed Consensus-Based Estimation Considering Network Induced Delays and Dropouts[J]. Automatica, 2012, 48(10): 2726-2729.
[46] 李风雷, 卢昊, 宋闯, 等. 智能化战争与无人系统技术的发展[J]. 无人系统技术. 2018, 1(2): 15-23.
Li Feng-lei, Lu Hao, Song Chuang, et al. Development of Intelligent Warfare and Unmanned System Technology[J]. Unmanned Systems Technology, 2018, 1(2): 15-23.
[47] 蒋荣华. 潜载UUV的作战使用分析[J]. 舰船电子工程,2015, 35(10): 17-20, 69.
Jiang Rong-hua. Application Analysis of Submarine UUV[J]. Ship Electronic Engineering, 2015, 35(10): 17- 20, 69.
[48] 唐胜景, 史松伟, 张尧, 等. 智能化分布式协同作战体系发展综述[J]. 空天防御, 2019, 2(1): 6-13.
Tang Sheng-jing, Shi Song-wei, Zhang Yao, et al. Review on the Development of Intelligence-based Distributed Cooperative Operational System[J]. Air & Space Defense, 2019, 2(1): 6-13.
[49] 万路军, 姚佩阳, 孙鹏. 有人/无人作战智能体分布式任务分配方法[J]. 系统工程与电子技术, 2013, 35(2): 310-316.
Wan Lu-jun, Yao Pei-yang, Sun Peng. Distributed Task Allocation Method of Manned/Unmanned Combat Agents [J]. Systems Engineering and Electronics, 2013, 35(2): 310-316.
[50] 邹启杰, 张汝波, 唐平鹏, 等. 基于多属性决策的自主等级评估算法[J]. 华中科技大学学报(自然科学版), 2011, 39(z2): 382-384.
Zou Qi-jie, Zhang Ru-bo, Tang Ping-peng, et al. Evaluation Algorithm for Autonomy Level Based on Multi-At- tribute Decision Making[J]. Journal of Huazhong University of Science and Technology(Nature Science), 2011, 39(z2): 382-384.
[51] 张伟, 王乃新, 魏世琳, 等. 水下无人潜航器集群发展现状及关键技术综述[J]. 哈尔滨工程大学学报, 2020, 41(2): 289-297.
Zhang Wei, Wang Nai-xin, Wei Shi-lin, et al. Overview of Unmanned Underwater Vehicle Swarm Development Status and Key Technologies[J]. Journal of Harbin Engineering University, 2020, 41(2): 289-297.
[52] 宋运忠, 杨飞飞. 基于行为法多智能体系统构形控制研究[J]. 控制工程, 2012, 19(4): 687-690.
Song Yun-zhong, Yang Fei-fei. On Formation Control Based on Behaviour For Second-order Multi-agent System[J]. Control Engineering of China, 2012, 19(4): 687- 690.
[53] 张帅. 基于人工势场法的无人机编队关键技术研究[D].哈尔滨: 哈尔滨工业大学, 2018.
[54] 曹和云, 倪先胜, 何利勇, 等. 国外潜载UUV布放与回收技术研究综述[J]. 中国造船, 2014, 55(2): 200-208.
Development and Key Technologies of Submarine-UUV Cooperative Operation
ZHANG Xin-ming, HAN Ming-lei, YÜ Yi-rui, HUANG Tian-li, CHEN Qian, WU Ming
(China Ship Research and Development Academy, Beijing 100101, China)
The cooperative operation of submarines and unmanned undersea vehicles(UUVs) is an important aspect of modern naval operational capabilities. It is also the most widely investigated field in terms of new operational concepts and new technologies in naval armaments. This study introduces the development of submarine-UUV cooperative operation, and mainly analyzes the developing strategies of undersea warfare system architecture, cooperative battle system and new undersea combat force in United States, Russia and United Kingdom; focuses on armament system technologies of undersea cooperative operation, including underwater multimedia transmission, network collaborative detection, multi-source heterogeneous information fusion, and operational application technologies, including control architecture, collaborative mission planning and allocation, autonomous decision-making with a lack of information, to provide technical reference for the coordinated development of armament technology and operational applications and the rapid formation of new underwater operational forces.
submarine; unmanned undersea vehicle; cooperative operations
TJ630.1; E925; E837
R
2096-3920(2021)05-0497-12
10.11993/j.issn.2096-3920.2021.05.001
张鑫明, 韩明磊, 余益锐, 等. 潜艇与UUV协同作战发展现状及关键技术[J]. 水下无人系统学报, 2021, 29(5): 497-508.
【编者按】潜艇凭借其特有的隐蔽作战模式长期称霸水下战场, 近年来世界强国均将其作为海上重要遏制力量加以发展, 使得现代新型潜艇的生命力和作战能力大幅提升; 与此同时, 无人水下航行器(UUV)在军事应用方面取得丰硕成果, 一些国家已开始着手构建相应的水下无人作战体系。伴随各种反潜技术和兵力战法的研究应用, 潜艇水下行动和作战运用面临更加复杂的形势, 传统的潜艇作战运用模式面临诸多挑战, 以单一平台为核心的对抗模式将逐渐丧失优势, 代之的以体系对抗为主的未来海上战争模式将会以体系化、无人化、智能化、分布式和集群化作为其主要特点。加快构建以平台为中心的水下作战体系, 同时大力发展水下隐蔽攻击等非对称作战模式, 对提升我国海军整体作战效能、形成非对称作战优势具有重要的军事意义。潜艇与UUV组成的异构协同作战系统, 作为水下作战体系的核心部分, 既可发挥人的决策经验优势, 又可发挥无人平台的机动自主能力, 将成为未来水下作战的主要模式。
该文以详细介绍国内外潜艇与UUV协同作战的发展现状为切入点, 重点论述了潜艇与UUV协同作战中水下组网通信、协同探测、作战模式设计、分布式智能协同指挥控制以及基础支撑性技术等关键技术, 内容详尽、分析严谨, 具有较强的可读性和借鉴价值。
2021-05-11;
2021-07-29.
张鑫明(1986-), 男, 博士, 高级工程师, 主要研究方向为水下体系对抗、信息与通信系统.
(责任编辑: 陈 曦)
猜你喜欢
电气技术(2022年8期)2022-08-20
北京航空航天大学学报(2022年6期)2022-07-02
小哥白尼(军事科学)(2022年1期)2022-04-26
科学与财富(2021年36期)2021-05-10
科学与财富(2021年35期)2021-05-10
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
军事文摘·科学少年(2018年6期)2018-09-06
今传媒(2016年11期)2016-12-19
科技视界(2016年13期)2016-06-13
小学阅读指南·低年级版(2014年10期)2015-01-27
