
蛙人探测声呐系统发展综述
2021-11-08 05:08孙玉臣王德石李宗吉孙玉祥于文强
水下无人系统学报 2021年5期
孙玉臣, 王德石, 李宗吉, 姜 斌, 张 恺, 孙玉祥, 于文强
蛙人探测声呐系统发展综述
孙玉臣1,2, 王德石1, 李宗吉1, 姜 斌3, 张 恺1, 孙玉祥2, 于文强4
(1. 海军工程大学 兵器工程学院, 湖北 武汉, 430033; 2. 中国人民解放军92767部队, 山东 青岛, 266102; 3. 海军潜艇学院 航海观通系, 山东 青岛, 266100; 4. 武汉天鲸科技有限公司, 湖北 武汉, 430040)
蛙人在水下声信号强度低, 难以被探测, 可秘密潜入港口、岛礁等重点水域进行侦察破坏等行动,是水下预警的重要方式之一。文中首先论述了水下探测蛙人的难点, 分别介绍了主被动声呐探测蛙人的原理和依据的声信号特征。然后, 综述了国内外蛙人探测声呐(DDS)装备的技术现状, 总结了目前DDS系统的技术特点, 包括信号处理技术、远距离传输及供电、安装布放、环境自适应能力、系统可靠性、多声呐联合以及多系统协同等方面, 提出了新材料技术、匹配层技术、检测概率提高技术、目标自动跟踪及识别技术、垂直相控发射技术以及组阵技术等DDS装备发展的关键技术, 为行业内DDS装备的研究提供参考。
蛙人探测声呐; 水下预警; 声信号特征
0 引言
针对水域的安全监控技术手段, 现有措施多注重水面以上的目标预警, 如使用雷达, 而针对水下区域的预警探测手段则较弱。随着“非对称作战”模式在各军事力量中的普及, 敌对破坏分子开始通过水下蛙人等方式秘密潜入港口、码头、勘探平台、锚泊区或岛礁等重点水域进行侦察破坏等行动。其中, 蛙人由于目标尺度小(见图1)、噪声低、信号频率低而较难被探测, 开发蛙人预警探测装备具有一定难度, 使得水下蛙人探测装备受到各海军强国的普遍重视[1]。

图1 携带运载器的蛙人
探测蛙人的方式包括可见光及热成像系统、水面搜索雷达、水下磁探测网络以及声呐等。其中, 可见光及电磁波信号在水下衰减严重, 同处于30 kHz频率上的水下辐射损失, 电磁波可达7500 dB/km, 声波仅为5 dB/km[2], 而实际电磁波频率一般比30 kHz要高很多, 因此衰减更加严重。相比之下, 由于水声是目前已知的最为可靠、可用的物理特性之一, 因此主要依靠声呐探测水下蛙人。
1 蛙人声信号特征
蛙人探测声呐(diver detection sonar, DDS)主要有主、被动2种方式, 其中主动声呐依靠蛙人的反射回波确认目标, 被动声呐则依靠蛙人的水下呼吸信号特征探测识别目标。
主动声呐进行蛙人探测时, 主动声呐发射的声波经蛙人目标反射的回波信号主要来源于其肺部组织、骨骼和其他软体组织。穿戴不同样式的潜水服, 蛙人目标的回波信号也有所区别: 开式潜水服信号最强, 在75 kHz时目标强度不小于–16.9 dB; 其次是干式潜水服, 在75 kHz时目标强度约为–17 dB; 湿式潜水服在75 kHz时的目标强度不到–25 dB。另外, 开式呼吸气瓶在75 kHz时目标强度约–24 dB; 蛙人身体的目标强度相对较小, 在75 kHz时目标强度约–27.2 dB。
被动声呐主要依靠蛙人的呼吸进行探测和识别。开式呼吸蛙人水下声辐射信号周期与其水下生理性呼吸基本一致, 是被动探测的理想频段, 其频率范围为0.2~13 kHz, 周期约为3~5 s (见图2)[3]。其吸气能量主要来源于减压阀的振动(频率范围为2~13 kHz, 持续时间约为0.7~0.8 s); 呼气能量主要源于气泡群的排出入水(频带范围为0.2~2 kHz, 持续时间约为1.2~1.5 s)。在标准参考距离和声压下, 开式呼吸蛙人的声源级约为161±1 dB, 半闭式呼吸蛙人的声源级约为131±2 dB, 全闭式呼吸蛙人的声源级约为108±1 dB, 三者的声源能量都主要集中于200 Hz以下[4]。
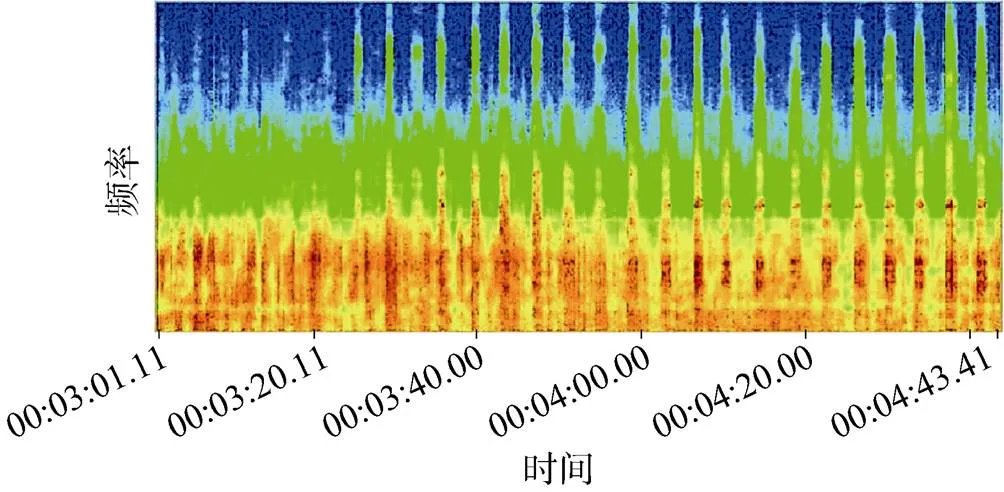
图2 蛙人信号时频光谱图
2 DDS研究进展
由于蛙人尺寸小、信号弱, 且其经常活动的港口和沿海等浅水地带经常会存在船舶残骸、港壁、海床等后向散射体或边界, 混响噪声严重[5], 增加了DDS的设计难度。针对上述特点, 利用具有高频声波的主动声呐来分辨蛙人更为可靠; 同时, 要提高探测距离性能, 就需要获取较高的目标回波强度, 因此高频主动声呐成为目前各国探测蛙人的主要方式。高频主动声呐工作频率分布于60~100 kHz, 带宽3~20 kHz, 发射声强级为180~210 dB, 最远探测距离范围为400~2000 m[6-8], 经常布置于港口、码头、海上平台或者随船携带等[9]。被动声呐在港湾等噪声复杂的环境下, 对蛙人目标检测的效果不甚理想, 但与主动声呐相比, 被动声呐能耗低、隐蔽性强、鲁棒性强, 对生态环境友好, 尤其配置于航母等大型舰艇周围时, 容易隐蔽自身, 且可以通过不同声学特性识别目标的功能[10-11], 因此被动声呐更适合用于长时间隐蔽探测和目标自动识别。
2.1 主动声呐
2004年, 英国QinetiQ公司设计生产了“地狱犬360”(Cerberus 360)DDS(见图3), 美军用其组建了港口水下安保系统(underwater port security system, UPSS)。该声呐工作深度小于10 m, 可座底海床或安装于船舷, 由椭圆型玻璃钢外壳包裹, 高1.2 m, 直径0.7 m, 水中质量45 kg, 由100 kHz搜索声呐(探测距离800 m)、300 kHz图像声呐(探测距离500 m)和2~8 kHz低频声呐3部分组成, 采用主被动联合探测方式, 其中前2个部分为主动声呐, 后1个部分为被动声呐, 可进行360°全方位搜索, 有效探测距离800 m, 可同时跟踪50个目标, 在100 kHz频率工作时可分辨出蛙人或海豚, 在300 kHz频率工作时可在探测距离内识别出蛙人肺部空气腔[6, 12-16]。
随后, 英国Atlas Elektronik公司研制了“地狱犬Ⅱ型”(Cerberus ModⅡ)DDS(见图4), 较“地狱犬360”系统布放和维护更加简单, 可独立工作, 也可多套协同, 目前已部署于德国海军护卫舰。该声呐由1~3个压电换能器阵组成, 采用主动方式工作, 工作频率70~130 kHz可选, 水平探测角度范围0~360°, 方位精度小于1°, 目标探测的水深范围2~50 m, 最大探测距离1000 m, 对开式呼吸蛙人的探测距离大于900 m, 跟踪距离大于850 m, 对闭式呼吸蛙人的探测距离大于700 m, 跟踪距离大于675 m, 该声呐单套独立工作时可同时跟踪50个目标[6]。

图4 “地狱犬Ⅱ型”DDS
英国Coda公司研制的Echoscope-SD型DDS, 为128×128主动声呐阵列, 工作频率分别为80 kHz (有效作用距离740 m, 用于探测目标)和180 kHz(有效作用距离140 m, 用于识别目标), 探测角度范围50°×50°, 距离和方位分辨率均高于0.5°, 可同时跟踪4个目标, 并对目标进行实时三维成像[12]。
2006年, 英国Sonardyne公司研制的“前哨” (Sentinel)入侵者探测声呐(intruder detection sonar, IDS)(见图5和图6), 因其表现优异的性能, 已成为世界上部署最广泛的DDS之一。该声呐可固定于港口海岸或随船配置, 最大工作水深50 m, 可单机独立运行或10套以内联网配合, 湿端换能器体积小巧, 近似为圆柱形, 直径0.3 m, 高0.4 m, 重30 kg, 采用主动工作方式, 工作频率70 kHz, 带宽20 kHz, 水平探测角度范围0~360°, 方位精度0.1~0.5°, 配合自动化程度较高的软件系统能够快速实现探测、识别和跟踪, 在列装测试中能够100%区分开式呼吸蛙人、闭式呼吸蛙人、水面游泳者、游艇以及鲸鱼等大型水下动物, 对开式呼吸蛙人的有效探测距离大于900 m, 与之配套的水下音响可对水下入侵的蛙人进行声音警告驱离, 目前已部署于美国海军和斯洛文尼亚海军, 2008年部署于亚太地区[6,17-23]。
英国Oceanscan公司的X-Type水下监视系统(见图7), 可在–5~40℃环境下正常工作, 最大工作深度500 m, 其声呐发射阵包括8块平面复合材料换能器, 接收阵直径约1 m, 内含多个接收模块, 该系统采用主动方式工作, 发射频率为100 kHz, 带宽约40 kHz, 探测距离范围500~ 1000 m, 水平波束宽分为90°/180°/270°/360°, 分辨率100 mm@50 m, 数据更新率1.5 fps@500 m, 可以同时对250个水下蛙人目标的侵入时间、位置、运动速度和轨迹等参数进行持续更新, 并对入侵者予以声光警告驱离[12, 18, 24-25]。

图5 “前哨”入侵者探测声呐

图6 “前哨”入侵者探测声呐布放

图7 X-Type发射阵和接收阵
2005年, 美国的综合蛙人预警系统(integra- ted anti-diver system, IAS)新加入10套SM2000水下监视系统(见图8), 该系统由挪威Kongsberg公司研制, 可安装于港口或船舷, 通过声呐高频成像, 能有效分辨蛙人的形状轮廓、运动速度及方向, 有效作用距离1 000 m, 发现目标后可使用大功率水下音响警告并驱逐蛙人至水面[12-13, 26-29]。

图8 SM2000水下监视系统
上世纪90年代, 美海军装备的AN/WQX-2 DDS可在730 m作用距离内区分蛙人与其他生物或物体, 并可有效分辨目标的距离和方位, 然后将其转换为GPS方位, 上传至数据链系统[12, 30]。
以色列DSIT公司先后研发了3型知名的DDS, 分别为“水盾”(AquaShield)DDS、“尖盾” (PointShield)便携式DDS和港口监控系统(harbor surveillance system, HSS)[6, 31-37]。
“水盾”DDS(见图9)于2006年面世[38], 其湿端换能器由德国ARSTECH GmbH公司生产, 该声呐适合宽广水域的水下目标长距离探测, 可长时间固定安装于水中并免于维护, 从探测到跟踪实现全天候全自动化, 采用模块化设计, 可单机独立运行或组合使用, 每套声呐的发射基阵由4个90°扇面的垂直线列阵组成, 接收基阵由4个水平线列阵十字形交叉组成(长1.25 m, 每2组阵列背向布置), 采用主动工作方式, 工作频率为60 kHz, 也可探测频率低于60 Hz的超低频声音信号, 在水平方向上提供120°/240°/360°可选角度覆盖范围, 角度精度小于0.1°, 港口海试验证了该声呐对闭式呼吸蛙人的探测距离可达740 m, 对开式呼吸蛙人的探测距离可达1000~1200 m, 对蛙人运载器(swimmer delivery vehicle, SDV)的探测距离可延伸至1400~2000 m, 测距精度高于0.5 m, 通过处理算法可有效分辨出水面或水下、蛙人或运动平台等各种目标, 能同时跟踪多达20个目标, 并可对目标的距离、方向、深度和多普勒速度进行实时解算。2014年开始, DSIT公司开发出“水盾”DDS的扩展系统, 大大拓展了探测距离, 对闭式呼吸蛙人的探测距离达到了1200 m, 对开式呼吸蛙人的探测距离达到了1800 m, 对蛙人运载器的探测距离达到了3 500 m。2004年, 在德国不来梅港的测试中对闭式呼吸蛙人的探测距离不足700 m, 之后在以色列港口的测试中对闭式呼吸蛙人的探测距离为740 m, 这2次海试的水深都为5~7 m[12-13, 15, 18, 31, 38-40]。
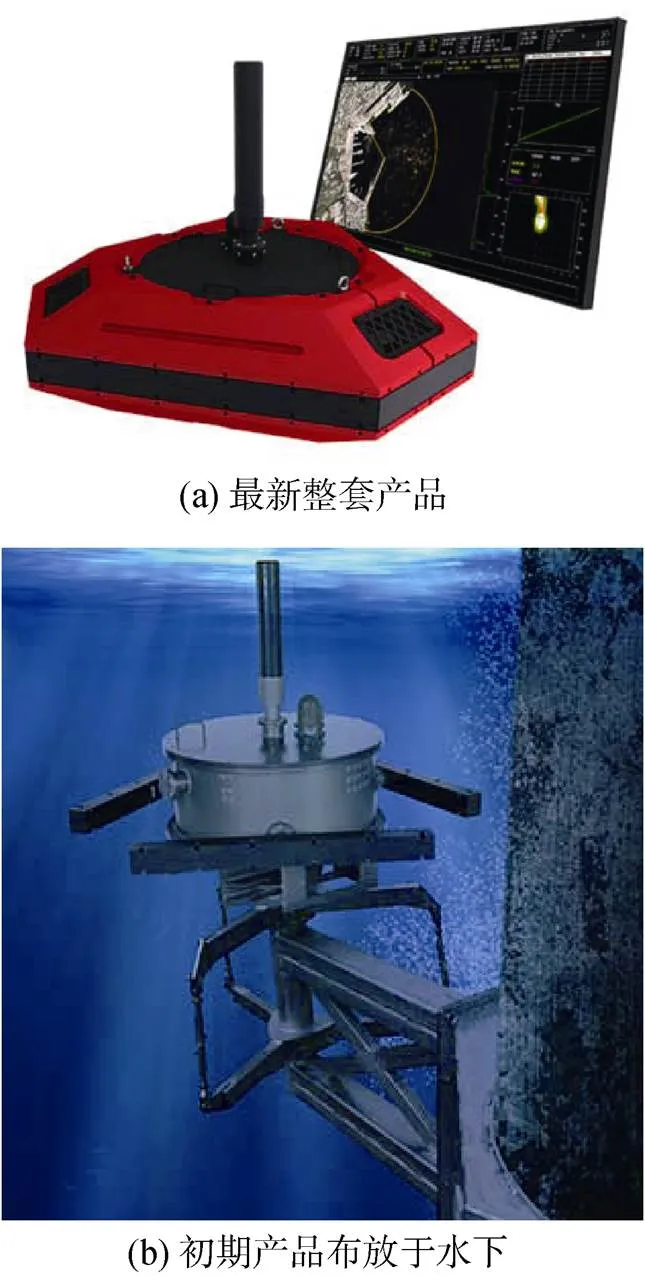
图9 “水盾”DDS
“尖盾”便携式DDS(见图10)于2007年面世, 该声呐小巧轻便, 可快速安装部署, 长期固定安装于海底、港口或随船携带, 适合狭窄水域的水下目标中、短距离探测, 从探测到跟踪实现全天候全自动化, 采用模块化设计, 可单机独立运行或多台组合使用, 采用主动工作方式, 工作频率70 kHz, 带宽20 kHz, 测距精度高于0.3 m, 角度覆盖范围0~360°, 角度精度小于0.4°, 对闭式呼吸蛙人的探测距离大于500 m, 对开式呼吸蛙人的探测距离大于700 m, 也可用来探测无人水下航行器(unmanned undersea vehicles, UUV)。2018年, 印度海军部署了78套该型声呐[6, 32-34, 41]。

图10 “尖盾”便携式DDS
DSIT公司的HSS是一套集成化程度非常高的港口入侵监控系统, 通过统一指挥和配置的DDS、监视雷达和光电预警传感器, 能够对深水、浅水和水面的水下平台、蛙人和水面小型舰船进行有效探测、跟踪和警告驱离, 具备全天候工作能力[6, 34, 42]。
加拿大C-Tech公司研制的CSDS-85岸港安全声呐(waterside security sonar, WSS)(见图11), 从第3代开始装备加拿大海军, 目前已升级至第5代。该声呐可在海底、岸侧固定或吊放安装, 也可随船携行, 可单台独立运行或多台组网, 采用主动工作方式, 工作频率80 kHz, 带宽3 kHz, 可选250 m/500 m/1000 m/1500 m/2000 m多个档位探测距离, 水平覆盖角度既可360°全向, 也可选择扇面范围, 可有效探测蛙人、蛙人运载器和小型水下平台[6, 13, 34]。

图11 CSDS-85岸港安全声呐
2012年, 土耳其研制了一种新型DDS(见图12), 该声呐主要布置于港口或海底, 采用主动工作方式, 工作频率60 kHz, 带宽2 kHz, 可选400 m/ 800 m/ 1 200 m多个档位探测距离, 配合自适应降噪算法, 对闭式呼吸蛙人的探测距离可达1200 m, 最多支持96台设备组阵, 可通过声光报警对水下入侵者进行警告[6, 34]。

图12 土耳其DDS概念图
波兰水下战中心与其国家海军研究院共同开发出了Kryl水下目标探测系统, 该系统包括主动换能器和水听器, 发现目标后可通过国家海军作战中心遥控提前布放的水雷打击入侵者。其中的Kryl-A子系统主要用于探测蛙人、海豚等水下小目标, Kryl-B主要用于探测水面舰船和潜艇。Kryl-A子系统可在150 m外探测到无装具的游泳者, 300 m外探测到携带装具的蛙人, 600 m外探测到小型水下航行器, 在最小8 m的深度中能同时跟踪10个目标[12]。
俄罗斯自前苏联时期就一直致力于DDS的研制, 目前已有“帕拉达”(Pallada)、“安纳帕”(Anapa)等多套高频主动声呐型号列装。设计于20世纪90年代的“帕拉达”舰载DDS在21世纪初验收成功, 分别在舰艇首尾各布置1套吊放基阵, 对舰艇形成探测回路网, 其工作频率高于100 kHz, 接收阵有48个水平波束, 水平角度范围为0~360°, 垂直角度范围0~20°, 最大探测距离400 m, 能同时跟踪3个目标。俄罗斯和乌克兰使用的是MOK-A型DDS, 采用主动探测方式, 利用匹配场设计原理, 在100 m距离上能有效探测到带吸声材料的蛙人[7, 12-13, 30]。
21世纪初, 我国对蛙人探测的方式手段仍然较少, 水面主要依靠侦查预警雷达、人力瞭望等方式进行预警; 水下预警方式普遍非常原始, 甚至靠水下布设阻隔网、布置碰撞铃铛等手段进行探测, 严重依赖人力, 预警效果差。虽然目前国内在DDS方面取得了不少进步, 但由于起步较晚, 相比英美等西方海洋强国, 在DDS的系统智能化、环境适应性、目标虚警率等方面还存在差距[43]。
我国与乌克兰合作研制的TRONKA DDS系统(见图13), 在第聂伯河和黑海的水下试验中效果良好, 2008年, 在青岛奥帆赛浮山湾赛场中成功投入实际应用, 填补了当时的国内空白。该系统主要由压电磁感应传感器、声速剖面仪等部分组成, 通过绞车实时调整声呐位置, 保持声速剖面仪所测场地声速的稳定, 使探测获得更好的效果, 结果通过显示器实时显示。该系统声呐正常工作水深20 m, 采用主动工作方式, 使用工作频率为60 kHz的3个主动声呐换能器, 每个换能器的水平覆盖角度为0~360°, 垂直覆盖角度0~10°, 方位精度2°, 3个换能器组合后垂直角度可覆盖30°, 探测范围宽800~1000 m, 纵深7~ 100 m, 对闭式呼吸蛙人的有效作用距离达500 m, 对开式呼吸蛙人的有效探测距离达900 m, 距离精度为1.5%, 对半径大于0.3 m、运动速度1.5~ 6 kn的目标探测效果突出, 可实现目标方位、距离和系统所在位置的声速、声线图等信息的实时传输[5, 6, 12-14, 44-46]。

图13 TRONKA DDS系统组成
中科院声学所提出依靠检测水下声场扰动的方式来检测是否有目标侵入声场范围, 在湖试过程中, 采用100 kHz的高频连续波(continuous wave, CW)信号作为发射声源构建水下稳定声场,通过射线理论检测声场的变化, 判别概率较高, 有望应用于中科院自主产权的固定安装声栅栏蛙人探测系统[47]。
中科院声学所与上海船舶运输科学研究所合作生产的2010型DDS系统(见图14), 在2010年上海世博会中成功投入使用, 该系统工作频率70 kHz, 探测范围可达0~180°, 宽带滤波器带宽10 kHz, 信号形式可选CW信号、线性调频(linear frequency modulation, LFM)、伪随机编码或双曲调频等, 可在4~20 kHz范围内自动调节带宽。在±15°范围内采取可调节的垂直相控发射方式, 便于匹配水下复杂地形。在混浊水环境探测距离超过200 m, 清澈水环境可达500 m以上, 对水下蛙人及无人航行器具备探测、跟踪、识别和定位能力。该系统由16台声呐组成, 多台声呐可以配合使用, 以扩展探测范围, 在同步工作的情况下可有效抑制各种干扰。之后, 根据厦门金砖五国会议、广州亚运会及三峡大坝等的需求, 对该系统不断进行系统集成, 先后与水下喊话器、雷达和视频监控等配套使用, 以降低虚警率[6, 12, 14, 48]。
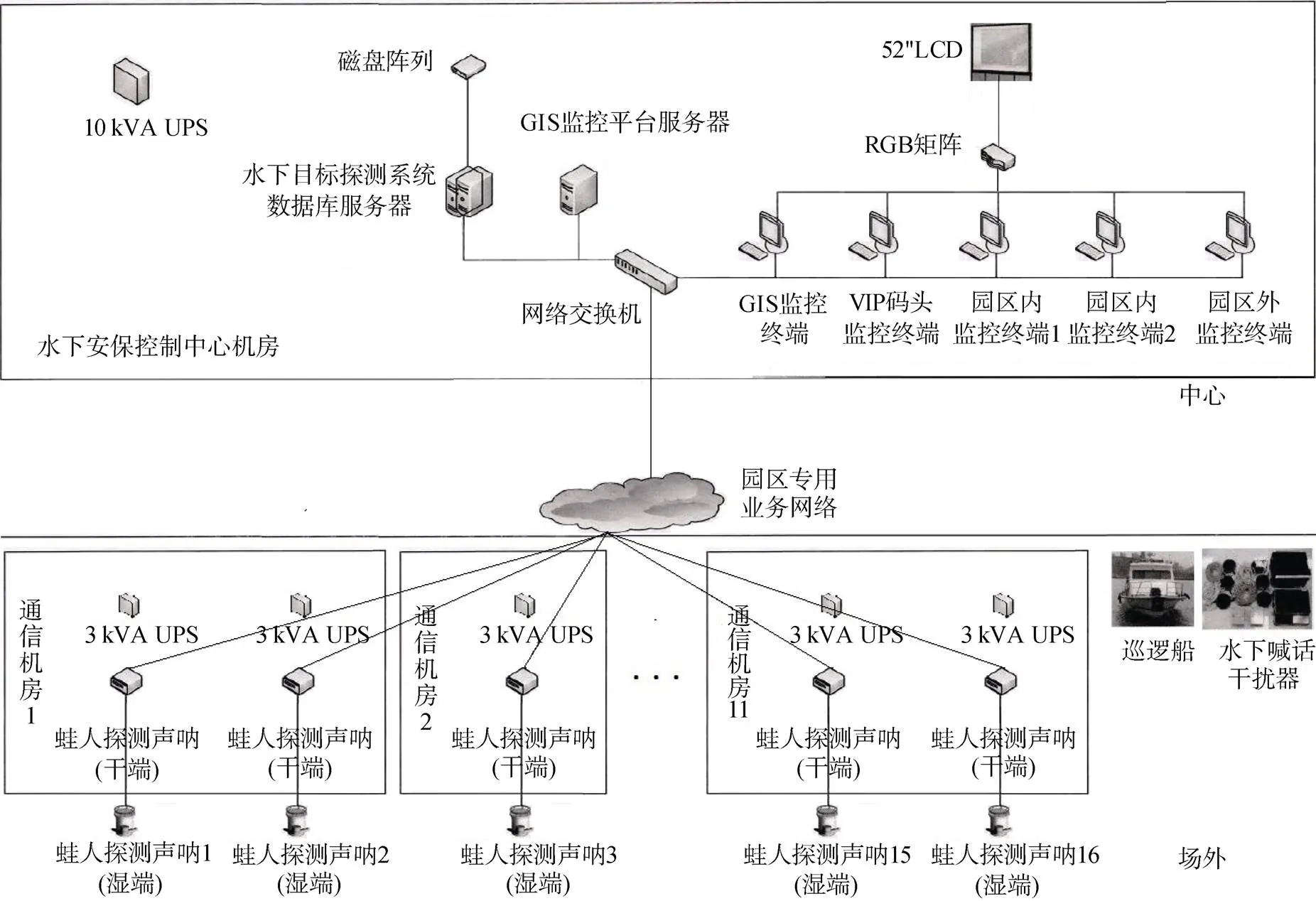
图14 上海世博会应用的水下安防系统组成示意图
2018年, 上海船舶电子设备研究所研制的水下安保声栅栏系统(见图15), 成功应用于该年11月在深圳大亚湾举办的中国杯帆船赛, 该系统采用锚系结构进行位置固定, 圆柱形换能器在水中始终保持竖直状态, 电子舱始终浮于水面, 系统布放之前需使用测深仪、侧扫声呐和地层剖面仪等设备对海底地形和深度进行探查, 根据水深、底质、水流速等参数调节锚的钢丝缆长度。该系统可以多台组合为声栅栏, 海上持续正常工作时间超过30天[49]。
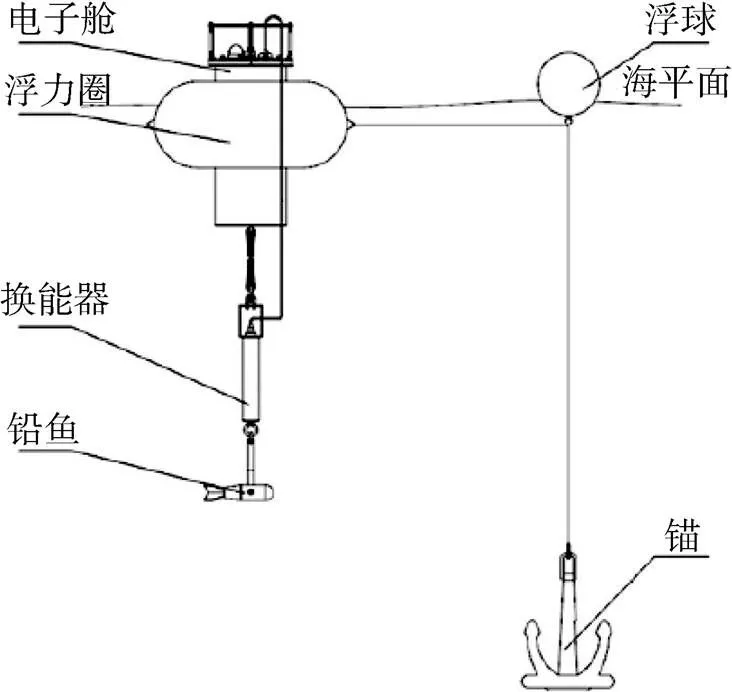
图15 声栅栏总体结构示意图
中船集团第715研究所研制的岸基DDS系统(见图16)采用主动探测方式, 主要由声呐基阵及岸上控制系统组成, 有效作用距离达公里级。“十二五”期间, 第715研究所又研制了船载小型声呐(见图17), 专门用于探测蛙人、水雷等水下小目标[18]。
中国电科三所于2016年研制的蛙人探测设备, 实现了发射阵、接收阵及相关软硬件的全套自主, 可自动进行目标检测、分类和识别[5]。
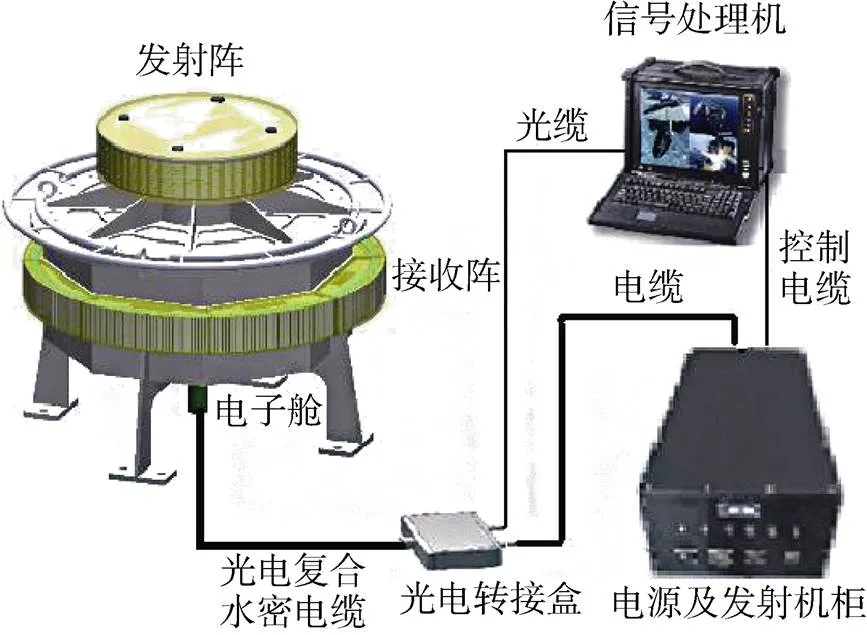
图16 第715研究所研制的岸基DDS系统

图17 715研究所研制的船载DDS
北京新源永泰公司研发的XT02WR01 DDS对水下蛙人的有效检测范围为400~700 m, 覆盖范围达150 hm2 [5]。
2.2 被动声呐
美国和荷兰通过被动声呐探测出了开式呼吸蛙人辐射声信号的周期性特征, 根据该特征信号, 分别研制出了SPADES和Delphinus System 两型水下被动探测系统, 后者的最远探测距离可达350 m[11, 50-51]。
海军工程大学的孙玉臣[52]与武汉天鲸科技有限公司合作研制的被动式DDS水平直线阵样机(见图18)于2018年在三亚某港口进行了海试, 成功探测到水下2 m深处的蛙人。

图18 海军工程大学研制的被动式DDS阵元
2.3 便携式声呐
2005年, 英军开始列装手持式蛙人侦察系统(diver reconnaissance system, DRS)(见图19), 该系统由英国QinetiQ公司研制, 可军民两用, DRS依靠电池供电, 在水下可连续工作6.5 h, 质量10 kg, 水下重0.5 kg, 工作深度可达100 m, 采用主动工作方式, 内含500 kHz前视高频电子扫描声呐, 可在230 m距离上探测到-25 dB的目标, 可有效探测水雷形状的类球形物体。该系统通过在水下布置2~4个工作频率为40~80 kHz的主动发射机进行可靠定位, 定位误差控制在0.5 m, 最大作用距离1 200 m, 对闭式呼吸蛙人的探测距离可达200 m以上, 声呐探测和导航信息均实时显示于机载平板显示器, 并支持数据回放[6, 13-14, 30]。

图19 手持式蛙人侦察系统
美国Soundmetrics公司研制的爱丽丝防御者3000(Aris defender 3000)型手持式声呐(见图20), 其探测频率为1.8 MHz(有效距离15 m), 识别频率为3 MHz(有效距离5 m), 工作水深100 m以内, 水平角度范围0~30°, 垂直角度范围0~14°, 波束宽度0.25°, 在水中为零浮力, 水中情况可同步显示于便携声呐屏幕和岸上显控台[53-54]。

图20 爱丽丝防御者3000
中船集团第750试验场研制了一款型号为TKIS-I的头盔式DDS(见图21), 该型DDS适合水下蛙人单兵佩戴, 最大使用水深60 m, 工作频率0.678~1.2 MHz, 覆盖角度范围0~28.5°, 波束宽度0.45°。

图21 TKIS-I头盔式DDS
上海瀚界科技公司开发了一型单兵便携式水下综合信息系统(见图22), 该系统将声呐、水下导航、显控眼镜和水下通信等功能集成于蛙人头盔, 蛙人可直接通过头盔内置的有机发光二极管(organic light-emitting diode, OLED)眼镜查看各种监控信息, 该头盔采用进口多波束扫描成像声呐, 工作频率750 kHz~1.2 MHz, 有效探测距离2~60 m, 距离分辨率8 mm, 最大波束512, 水平开角120°, 垂直开角20°, 角度分辨率1.2°, 波束间隔0.25°, 该型装备在2019年阿布扎比国际防务展进行了展出[55]。

图22 单兵便携式水下综合信息系统
3 DDS系统主要技术难点
要使DDS系统在使用过程中能够顺利完成工作, 需要考虑以下技术难题和关键节点。
3.1 信号处理技术
DDS需要辨别的水下声信号主要有主动声呐的辐射信号、目标回波和周边移动舰艇的噪声等。在声呐信号发射波束方面, 采用高分辨率多波束形成技术可以实现反蛙人声呐高速大范围区域扫描。而全数字波束可使上百个接收换能器形成各自独立的信道, 将某一个信道与其他换能器阵元的时延信号或相移信号进行融合, 可以形成特定方向上的空间指向, 并减少机械能耗, 缩短系统反应时间。
声呐的探测距离由多种因素决定, 包括波束宽度、发射功率、目标信号强度和接收灵敏度等。为了简化高分辨率多波束声呐系统的计算, 声呐的发射波束宽度与警戒扇面宽度相等为宜。而发射波束越宽, 对发射换能器尺寸的要求越小, 但为了提供较强的发射信号强度, 又要求发射换能器具有较高的声源级, 这就会导致发射器空化现象的产生, 因此在保证波束宽度的前提下, 为避免空化, 需要增加发射器的表面积, 例如使用凸弧形阵等曲面阵。
3.2 远距离传输及供电
DDS一般布置于港口、舰船附近或岛礁近岸, 根据使用环境的不同, 预警控制中心与所部属声呐系统的水下单元距离一般为200~2000 m, 传统电缆或双绞线因阻抗和干扰引起的信号衰减和失真明显, 传输距离受限。光纤传输技术可以较好地解决这个问题。当水下声呐与预警指挥控制中心之间的距离超过100 m时, 光纤就成为首选的传输介质。经计算, 长度2 km的光纤对信号的衰减仅约3 dB[56]。光纤传输部分除了完成信号的有效传输外, 还要做好与同轴信号线间的信息转换, 同时为节省成本, 光纤与电源金属线一般捆绑制作, 水下部分需自带信号调制及电源分配模块, 并做好水密工作。为保护光缆可靠传输, 光缆的水下部分宜加装铠装, 其水陆交接部分应做好隐蔽保护处理。
3.3 安装布放
声呐系统的部署应当提前考察蛙人可能的入侵路线, 探测深度应与预期入侵目标的深度大致相当, 为最大程度减少空化气泡、水面噪声等干扰, 换能器布置深度应足够, 一般布置在水下10~20 m。根据实际需要和成本考虑, 布放方式可以选择固定式部署, 使声呐长期固定于水底, 也可采用机动式部署, 通过折叠回收等装置完成快速收放。
在港口岛礁周围、基地入口等大面积区域, 为保证探测声波的完整覆盖, 通常部署多部DDS进行警戒。多个声呐换能器工作时, 互相存在一定的交叠区, 声波扇面角度以10°~15°为佳。2个及以上的换能器同时工作, 为减少相互之间的干涉, 所有的发射应当同相。
3.4 环境自适应能力
海洋中声速、盐度、温度以及声线弯曲等因素会随使用地点、部署地季节等条件变化而变化。因此, 为了加强DDS系统的环境自适应能力, 应对声呐部署地的声速等因素进行实时测量, 以补偿传播损失, 将测量到的实时数据进行建模, 利用蒙特卡洛等算法计算出传播损失的结果, 以此对声呐发射波束进行调整以达到声呐的最优性能。也可将多台不同性能的声呐交叉重叠使用, 不同性能的声呐对同一环境因素的变化反应是不同的, 以此始终保证其中的几台声呐可以在较佳状态工作。另外, 可通过加装航向、姿态、三维全向等传感器, 以实现声呐姿态数据的自我校准。有些先进的DDS已具备了内部异常磁场校准功能, 大大提高了声呐使用环境的自适应能力。
3.5 系统可靠性
除了提高单台装备的使用寿命和可靠性之外, 可通过组网技术, 将多个换能器连接成为网状链路, 以提高系统稳定性。当网络中某节点或线路出现问题时, 系统可自行检测定位故障点, 并回馈给指挥控制中心, 同时不影响其他部分的正常工作, 从而将单节点故障导致的声呐系统功能影响降到最低。在多部声呐工作过程中, 为保证蛙人探测不留死角, 在布放距离上应保证相邻声呐之间存在互相重叠的探测区域, 重叠区域内, 较强的换能器信号可以弥补较弱的信号, 从而保证信号的连续性。
3.6 多声呐联合
蛙人在速度一定的情况下, 要做到提前预警并延长预警持续时间, 就需要扩大声呐换能器的探测距离, 以此扩大有效监控范围。但扩大探测距离势必会影响到换能器的目标分辨率, 导致信噪比下降。
多套声呐系统联合工作, 能够有效增强对目标探测的指向性, 提高探测距离, 扩大覆盖范围。水下预警的特点决定了DDS必将大规模集群式发展, 采取多套声呐系统联合配合工作的模式, 形成监控网络。但伴随监控网络中声呐数量的增多和信号线路的延长交叉, 声呐之间的相互影响和干扰也会增加, 为此, 在网络系统设计中必须要考虑声呐间的相互作用, 力求各声呐系统协调同步工作[48]。
3.7 多系统协同
随着多波束声呐技术、信号数据库技术、目标识别技术、光纤传输技术、实时数字信号处理技术以及光纤激光水听器技术的日益成熟, 未来, 水下蛙人探测系统将会由单纯的水声换能器探测逐步完善成集水下导航、定位、远距离信息传输、数据库比对、信号特征识别、光电传感系统和警告打击系统等多系统集合的探测系统[57], 从而在降低虚警率、拓展探测范围、可靠信号传输、提高自动化程度、值班全天候的基础上, 实现探测距离远近搭配, 检测精度高低配合, 并降低整个系统的能耗。
4 DDS系统关键技术
为有效解决上述技术问题, 提高DDS系统的综合工作能力, 需要从提高单阵元性能、优化信号处理技术和探索新的组阵形式等方面开展进一步研究。
4.1 新材料技术
锆钛酸铅压电陶瓷(PZT)作为最常用的压电材料, 因其高稳定性和强压电性, 已被业界使用30余年。性能优良的水听器一般具备较大的静水压压电常数, 但受物理特性限制, PZT材料的压电常数很小, 柔韧性较差, 抗机械冲击能力不足, 导致其在压电换能器的应用进一步受限[58]。
近年来, 随着新材料技术的发展, 为了进一步拓展换能器带宽, 提高压电常数, 保持换能器长期工作的稳定性, 一系列性能更优的压电材料陆续被研发, 最具代表性的主要有复合压电材料、压电高聚物聚偏二氟乙烯(PVDF)、弛豫铁电体PZNT和PMNT、玻璃陶瓷以及稀土超磁致伸缩材料(Terfenol-D)等[59]。
在目前研究的复合压电材料中, 1-3型复合压电材料是应用最广泛的一种。复合压电材料柔韧性好, 便于加工; 相同尺寸下, 其静水压压电常数比PZT高1~2个数量级; 密度较低, 与水介质能实现较好的声匹配; 声阻抗较低, 约为同尺寸PZT材料的25%; 机械品质因数比同尺寸PZT低2~3个数量级, 适合拓展带宽; 介电常数很低, 利于提高电压接收灵敏度; 厚度耦合系数最高可达0.7, 大大优化了换能器的性能。但由于聚合物的引入, 增加了复合压电材料的机械损耗[58-60]。
压电高聚物中的PVDF材料是目前研究应用最广泛的一种, 该材料是一种塑性薄膜, 柔韧性好, 密度低, 声速小, 声阻抗与水介质接近, 水下匹配性好, 对温湿度等变化高度稳定, 且压电性很强, 其压电常数比PZT高十余倍, 静水压压电常数比PZT材料高很多, 可提高水听器的灵敏度, 因其制作方便且成本低, 便于大批量生产, 是一种十分理想的接收器压电材料[58]。
弛豫铁电材料是由PbTiO3和A(B1B2) O3(A、B1和B2分别代表某种组分)所形成的固溶体单晶, 主要有PMNT和PZNT两种。该材料具有很大的磁致伸缩系数而磁滞性几乎可以忽略, 有较高的介电常数, 压电常数分量可达PZT的3~6倍, 有效机电耦合系数可达0.92, 比PZT高20%以上, 应变可达1.7%, 现居压电材料首位, 带宽容量接近2个倍频程[24], 适合制作发射换能器, 在水听器中也具备较高的接收灵敏度。但其对工作环境要求苛刻, 要达到最佳工作性能, 需在该材料上施加一定的偏极化场或预应力, 且工作温度要低于60℃[58]。
与铁电体压电材料相比, 玻璃陶瓷基本不存在去极化和老化等问题, 能够在高温及高振荡频率环境下工作, 适合制作超声波换能器[58]。
稀土超磁致伸缩材料依靠焦耳效应和魏拉里效应进行发射和接收声波, 可实现电—磁—声3种能量之间的转换。与普通磁致伸缩材料相比, 该材料的磁致伸缩性能提高了近100倍, 其能力密度比同尺寸PZT高近30倍, 目前已应用于各种换能器中[61]。
4.2 匹配层技术
匹配层技术是指在换能器辐射端黏结一层或多层匹配层材料的技术, 主要起到以下3个作用: 一是隔离海水, 将换能器与外界介质绝缘密封, 保持其机电特性; 二是通过匹配声阻抗提高其灵敏度等传输能力; 三是依靠双谐振或多谐振的产生拓展其带宽[62]。计算认为, 单层匹配层的最佳厚度为中心工作频率波长的1/4[63]。
同时, 匹配效果还受材料因素影响, 实验发现, 传统聚苯乙烯材料的声透射性能要好于环氧树脂, 在发射与接收换能器上, 聚苯乙烯在拓展带宽方面的性能更佳[48]。
4.3 检测概率提高技术
目前, 主动声呐探测蛙人主要依靠蛙人肺泡或呼吸产生的气泡, 蛙人目标辐射噪声功率很低, 有效目标回波信号强度小, 且DDS的部署地通常为近岸浅水, 水下混响干扰多, 声呐系统对目标定位难度大。为了提升小信号目标的检测率, 降低虚警, 拓展声呐的作用距离, 就必须提高其信噪比。可从2个方面减少混响的影响: 一是通过系统设计改变声呐信号发射的形式, 将过去经常采用的CW信道改为宽带信道, 通过长脉冲发射来提升信噪比, 消除CW信号的长脉冲发射与分辨率的矛盾; 二是抑制混响, 提高输出信噪比, 宽带信号可更好地抑制体混响等随机混响, 并增加信号的稳定性, 从而使声呐探测距离更远。
在使用传统水平窄波束的同时, 辅之以可调节的垂直波束, 依靠竖直指向降低混响的干扰, 并构建蛙人三维探测空间。另外, 通过借鉴相关算法, 利用垂直发射波束的低旁瓣级及声呐性能建模仿真技术等, 也可以降低濒海混响对声呐系统信号的影响[64]。
4.4 目标自动跟踪与识别技术
为了在复杂噪声环境下对蛙人等小目标进行自动跟踪, 目前一般采用动静目标分离算法, 将运动和静止的目标进行区分, 并使用多波束信号系统, 保持目标对准, 提高信噪比, 采用交互式滤波提取运动目标轨迹。对于多运动目标则采用多信息联合的贝叶斯滤波算法或极大似然滤波算法, 可实现同时跟踪多个目标。这2种方法已广泛应用于雷达数据处理, 检测结果能以声图形式显示[9]。通过大量实测的方法提前构建水下目标运动特性数据库, 通过人工智能构建推理算法规则库, 采用极大似然原理, 进行目标的特征提取和检测, 由此统计推理, 达到目标自动分类的目的, 可以判别出蛙人、鱼类、舰船及水下哺乳动物等各类目标[48]。
4.5 垂直相控发射技术
为使声呐在狭窄等地形复杂的水底仍能发挥性能, 就必须使其具备对环境的自适应能力。国内采用先进的垂直相控发射技术使声呐更好地适应复杂水下地形。这种技术解决了大束宽引起的能量发散问题, 扩大了狭窄水下地形的声呐覆盖范围, 减小了声呐混响, 同步实现了混响抑制和声呐盲区抑制, 使声呐的性能不会因地形环境问题而受过多影响[2]。
4.6 组阵技术
随着信号处理技术的发展, 组阵技术逐渐由以前的相同阵元、等间隔、同平面布阵、施加同等激励的方式向多种不同性能阵元、变化间隔、立体布阵、施加不同激励的方向发展, 这主要得益于相控和束控信息处理技术的进步, 从而可以大大拓展基阵的工作频带等性能。
5 结束语
文中介绍了水下蛙人探测的难点, 分别论述了主被动探测条件下的蛙人水下声信号特征, 对国内外DDS装备的发展情况进行了综述, 总结出了目前国内外的DDS系统的主要技术性能和特点, 分析了DDS系统目前面临的主要技术问题和关键技术。可以看出, 经过多年努力, 国内对蛙人水下声信号特征的研究日趋成熟, 对主被动声呐探测蛙人的技术已接近国际水平, 但实际列装型号较少, 对蛙人在水下不同条件下的信号特征研究还有待完善, 这也是我国水声技术领域的一个重要发展方向。
[1] 易华君. 日益发展的反蛙人装备[J]. 水雷战与舰船防护, 2006(4): 61-65.
[2] Waite A. D. 实用声纳工程[M]. 王德石, 译. 3版. 北京: 电子工业出版社, 2004.
[3] Borowski B, Sutin A, Roh H, et al. Passive Acoustic Threat Detection in Estuarine Environments[C]// Proceedings Volume 6945, Optics and Photonics in Global Homeland Security IV. Orlando, Florida, United States: SPIE Defense and Security Symposium, 2008: 694513- 1-694513-11.
[4] Radford C A, Jeffs A G, Tindle C T, et al. Bubbled Waters: The Noise Generated by Underwater Breathing Apparatus[J]. Marine and Freshwater Behaviour and Physiology, 2005, 38(4): 259-267.
[5] 孙珂. 基于OMAP-L138的蛙人探测声呐目标模拟应答器设计[D]. 哈尔滨: 哈尔滨工程大学, 2019.
[6] 黄颖淞, 葛辉良, 王付印, 等. 蛙人探测声呐系统发展综述[J]. 水下无人系统学报, 2020, 28(1): 1-9.
Huang Yin-song, Ge Hui-liang, Wang Fu-yin, et al. Review on the Development of Diver Detection Sonar System[J]. Journal of Unmanned Undersea Systems, 2020, 28(1): 1-9.
[7] 蒋立军, 杨娟, 许枫. 蛙人探测声呐技术研究进展[J]. 科学通报, 2009,54(3): 269-272.
Jiang Li-jun, Yang Juan, Xu Feng. Technological Progress of Diver Detection Sonar[J]. Chinese Science Bulletin, 2009, 54(3): 269-272.
[8] 欧阳文, 朱卫国. 蛙人探测声呐系统研究进展[J]. 国防科技, 2012,33(6): 53-57.
Ouyang Wen, Zhu Wei-guo. The Advancement of the Research of the Frogman Detect Sonar System[J]. National Defense Science and Technology, 2012, 33(6): 53-57.
[9] 胡明军. 蛙人探测声呐的现状及发展趋势[J]. 四川兵工学报, 2010, 31(1): 36-37.
[10] Lennartsson R K, Dalberg E, Persson L, et al. Passive Acoustic Detection and Classification of Divers in Harbor Environments[C]//Oceans 2009. Biloxi, MS, USA: IEEE, 2009.
[11] 聂东虎, 乔钢, 朱知萌, 等. 水下蛙人主被动探测实验研究[J]. 声学技术, 2015(4): 300-305.
Nie Dong-hu, Qiao Gang, Zhu Zhi-meng, et al. Experimental Research of Passive and Active Detection for Underwater Diver[J]. Technical Acoustics, 2015(4): 300-305.
[12] 张寅权, 张爽, 孙春健, 等. 水下目标监视系统发展综述[J]. 海洋信息, 2019, 34(1): 11-18.
Zhang Yin-quan, Zhang Shuang, Sun Chun-jian, et al. Development of Underwater Target Surveillance System [J]. Marine Information, 2019, 34(1): 11-18.
[13] 赵武. 蛙人被动式探测中的识别方法研究[D]. 成都: 电子科技大学, 2017.
[14] 徐瑜, 倪小清, 夏红梅, 等. 蛙人探测声呐发展现状及关键技术[J]. 舰船电子工程, 2017, 37(3): 1-3, 126.
Xu Yu, Ni Xiao-qing, Xia Hong-mei, et al. Current Status of Diver Detection Sonar and Key Technologies[J]. Ship Electronic Engineering, 2017, 37(3): 1-3, 126.
[15] 宋昕, 甘新胜. 舰艇近区安全防卫系统分析[J]. 指挥控制与仿真, 2013, 35(5): 39-42.
Song Xin, Gan Xin-sheng. Discussion on Development of Ship Near-zone Defense System[J]. Command Control & Simulation, 2013, 35(5): 39-42.
[16] Pickeringbrown S M, Baker M, Nonaka T, et al. Navy to Evaluate Anti-Terrorist Diver Detection System[J]. Sea Technology, 2004(11): 65.
[17] The Hydrographic Society UK. Slovenian Navy Chooses Sonardyne Sentinel Diver Detection Sonar[EB/OL]. [2019-09-27]. https://www.ths.org.uk/news_details.asp? V 0=208.
[18] 许钢灿, 倪东波, 郭建. 反蛙人声呐系统发展综述[J]. 中国安全防范技术与应用, 2018(5): 13-18.
Xu Gang-can, Ni Dong-bo, Guo Jian. Development of Anti Frog Sonar System[J]. China Security Protection Technology And Application, 2018(5): 13-18.
[19] Anon. New Sonardyne Diver Detection Sonar[J]. Ocean News & Technology, 2007,13(5): 51.
[20] Anon. Sentinel Diver Detection Sonar Succeeds in Warm Asia Pacific Waters[J]. Ocean News and Technology, 2008, 14(5): 48.
[21] Anon. Sentinel Diver Detection Sonar Used in Asia Pacific Waters[J]. Sea Technology, 2008, 49(8): 70-71.
[22] Anon. Sentinel Diver Detection Sonar Completes U.S. Navy Trials[J]. Sea Technology, 2008, 49(1): 56.
[23] Anon. Diver Detection Success in UK Port Trials[J]. Mari- time journal, 2009(259): 33.
[24] 胡明, 朱辉庆. 中高频水声换能器发展综述[J]. 声学与电子工程, 2014(4): 40-44.
Hu Ming, Zhu Hui-qing. Development of Medium and High Frequency Underwater Acoustic Transducers[J]. Acoustics and Electronics Engineering, 2014(4): 40-44.
[25] Svet V D, Sandilands D, Monteiro M. An Improved Diver Detection Method for Shallow-Water Port Areas[J]. Sea Technology, 2009, 50(11): 25-28.
[26] Anon. Kongsberg Maritime Installs Diver Detection System[J]. Sea Technology, 2006, 47(8): 74.
[27] Anon. Kongsberg Diver Detection System[J]. Ocean News and Technology, 2006, 12(4): 44.
[28] Crawford A M, Vance Crowe D. Observations from Demonstrations of Several Commercial Diver Detection Sonar Systems[C]//Oceans 2007. Vancouver, BC, Cana- da: IEEE, 2007.
[29] Anon. Kongsberg’s DDS 9000T Diver Detection Sonar[J]. Ocean News and Technology, 2007, 13(5): 54.
[30] Shcherbakov V. How to Kill a Frogman? Anti-saboteur Weapons and Devices-a Russian Approach[J]. Naval Forces, 2007, 28(3): 64-70.
[31] Newswire P R. Navy Orders DSIT’s AquaShield™ Diver Detection Sonar[R]. PR Newswire US, 2014.
[32] Newswire P R. DSIT, An Acorn Energy Company, Secures New Order for PointShield™ Portable Diver Detection Sonar[R]. PR Newswire US, 2012.
[33] Shmuel G. DSIT Receives an Order for 78 PointShield Portable Diver Detection Sonars[EB/OL]. [2021-09-09]. https://dsit.co.il/dsit-receives-order-78-pointshield-portable-diver-detection-sonars/.
[34] 黄颖淞, 葛辉良, 王付印, 等. 蛙人探测声呐系统发展综述[J]. 水下无人系统学报, 2020, 28(1): 1-9.
Huang Ying-Song, Ge Hui-Liang, Wang Fu-yin, et al. Review on the Development of Diver Detection Sonar System[J]. Journal of Unmanned Undersea Systems, 2020, 28(1): 1-9.
[35] 佚名. 以色列推出先进的蛙人探测声呐[J]. 舰载武器, 2006(2): 10.
[36] Shmuel G. DSIT Solutions Ltd., an Acorn Energy Com- pany, Receives an Order for Six Portable Diver Detection Sonar Systems for the Protection of Naval Vessels[EB/ OL]. [2012-11-09]. https://www.edn.com/dsit-solutions- ltd-an-acorn-energy-company-receives-an-order-for-six-portable-diver-detection-sonar-systems-for-the-protection- of-naval-vessels/.
[37] New Product News: Diver Detection Sonar Protects Assets from Underwater Threats[EB/OL]. [2014-6-9]. http:// pku. summon.serialssolutions.com/2.0.0/link/0/.
[38] DSIT Solution. AquaShield™ Diver Detection Sonar (DDS)[EB/OL]. [2020-6-27]. https://dsit.co.il/sonar/un- der-water-security/diver-detection-sonar-aquashield-dds/.
[39] 陈健. 国外浅水小目标探测系统发展综述[C]//中国造船工程学会电子技术学术委员会2006学术年会. 中国贵州贵阳: 中国造船工程学会, 2006.
[40] Acorn Energy, Inc.. DSIT Signs an Agreement Valued at Close to US$5M Securing Future Orders for the AquaShield Diver Detection Sonar[EB/OL]. [2009-1-9]. http://pku.summon.serialssolutions.com/2.0.0/link/0/.
[41] DSIT Solution. Portable Diver Detection Sonar-Point- shield™ PDDS [EB/OL]. [2020-6-27]. https://dsit.co.il/ sonar/underwater-security/portable-diver-detection-sonar- pointshield-pdds/.
[42] DSIT Solution. Harbor Security–Harbor Surveillance System (HSS) [EB/OL]. [2020-6-28]. https://dsit.co.il/ sonar/underwater-security/harbor-surveillance-system-hss/.
[43] 邢更力, 徐常星, 范殿梁, 等. 近岸水域反恐防范技术发展现状及关键技术[J]. 中国安全防范技术与应用, 2018(5): 8-12.
[44] 张颖, 孙继昌, 郭威. 蛙人探测声纳系统在奥帆赛中的应用[J]. 气象水文海洋仪器, 2008(3): 47-50.
Zhang Ying, Sun Ji-chang, Guo Wei. Application of Research of TRONKA Sonar System in Frogmen Detection[J]. Meteorological, Hydrological and Marine Instru- ments, 2008(3): 47-50.
[45] 张颖, 孙继昌, 张颖颖, 等. TRONKA声纳系统在蛙人探测中的应用研究[J]. 海洋技术, 2008, 27(2): 92-95.
Zhang Ying, Sun Ji-chang, Zhang Ying-ying, et al. Application of TRONKA Sonar System in Frogman Detection[J]. Ocean Technology, 2008, 27(2): 92-95.
[46] 张波, 刘文章. 蛙人回波建模与实验研究[J]. 应用声学, 2010, 29(4): 313-320.Zhang Bo, Liu Wen-zhang. Modeling and Experimental Study of Echo from a Diver[J]. Applied Acoustics, 2010, 29(4): 313-320.
[47] 张伟豪, 许枫. 基于扰动声场的水下入侵目标检测方法[J]. 哈尔滨工程大学学报, 2009, 30(9): 975-979.
Zhang Wei-hao, Xu Feng. A Method for Detecting Underwater Intruders Based on Disturbed Sound Field[J]. Journal of Harbin Engineering University, 2009, 30(9): 975-979.
[48] 尹凯华. 蛙人探测声纳在水下安保的技术实现[J]. 上海船舶运输科学研究所学报, 2011, 34(1): 71-75.
Yin Kai-hua. Underwater Security by Diver Detection Sonar System[J]. Journal of Shanghai Ship and Shipping Research Institute, 2011, 34(1): 71-75.
[49] 杨小芳, 陆红茂, 陈子铨, 等. 水下安保声栅栏设备总体结构设计与应用[J]. 科学技术与工程, 2019, 19(21): 315-319.
Yang Xiao-fang, Lu Hong-mao, Chen Zi-quan, et al. Design and Application of the Overall Structure of Underwater Security Acoustic Fence Equipment[J]. Science Technology and Engineering, 2019, 19(21): 315-319.
[50] Stolkin R, Sutin A, Radhakrishnan S, et al. Feature Based Passive Acoustic Detection of Underwater Threats[C]// Proceedings Volume 6204, Photonics for Port and Harbor Security II. Orlando (Kissimmee), Florida, United States: SPIE, 2006.
[51] Stolkin R, Florescu I. Probability of Detection and Optimal Sensor Placement for Threshold Based Detection Systems[J]. IEEE Sensors Journal, 2009, 9(1): 57-60.
[52] 孙玉臣. 反蛙人水声换能器设计研究[D]. 武汉: 海军工程大学, 2017.
[53] Anon. Soundmetrics, Arics Defender 3000[EB/OL]. [20 21-9-10]. http://www.soundmetrics.com/Products/ARIS- Sonars/ARIS-Defender-3000.
[54] 刘宁, 李珊, 茶文丽. 蛙人装备研究现状及发展展望[J]. 中国造船, 2018,59(4): 212-222.
Liu Ning, Li Shan, Cha Wen-li. Research Status and Development Prospect of Frogman Equipment[J]. Shipbuilding of China, 2018, 59(4): 212-222.
[55] 胡延平, 黄晓霜, 政书钧. 单兵便携式水下综合信息系统设计与实现[J]. 电子技术应用, 2019, 45(8): 83-86.
Hu Yan-ping, Huang Xiao-shuang, Zheng Shu-jun. Design and Implementation of Portable Underwater Integrated Information System for Individual Soldiers[J]. Appli- cation of Electronic Technique, 2019, 45(8): 83-86.
[56] 刘洋, 李先伟, 张波. 反蛙人声呐技术结构分析[J]. 舰船科学技术, 2012, 34(3): 99-101.
Liu Yang, Li Xian-wei, Zhang Bo. The Analysis of Technique And Structure In Diver Detecting Sonar[J]. Ship Science and Technology, 2012, 34(3): 99-101.
[57] 张彦敏, 佟盛. 蛙人探测声呐系统关键技术论证[J]. 舰船科学技术, 2010, 32(2): 44-47.
Zhang Yan-min, Tong Sheng. Demonstration of the Key Technology of Diver Detection Sonar System[J]. Ship Science and Technology, 2010, 32(2): 44-47.
[58] 栾桂冬, 张金铎, 王仁乾. 压电换能器和换能器阵[M]. 北京: 北京大学出版社, 2005.
[59] 李邓化, 居伟骏, 贾美娟, 等. 新型压电复合换能器及其应用[M]. 北京: 科学出版社, 2007.
[60] 张凯. 高频宽带压电复合材料换能器研究[D]. 哈尔滨: 哈尔滨工程大学, 2011.
[61] 贺西平. 稀土超磁致伸缩换能器[M]. 北京: 科学出版社, 2006.
[62] 冯若. 超声手册[M]. 南京: 南京大学出版社, 1999.
[63] 韩宝栋, 张恺. 匹配层结构Tonpilz水声换能器的有限元分析[J]. 四川兵工学报, 2013, 34(2): 54-56.
Hao Bao-dong, Zhang Kai. FEM Analysis of Tonpilz Acoustic Transducer with Matching Layer[J]. Sichuan Ordnance Journal, 2013, 34(2): 54-56.
[64] 王萍, 余华兵, 乔钢, 等. 蛙人湖试试验处理分析方法[C]//2016年全国声学学术会议论文集. 武汉: 中国声学学会, 2016: 205-208.
[65] 李新天. 三型高频声呐的关键技术与发展趋势[J]. 声学与电子工程, 2011(4): 51-53.
Li Xin-tian. The Key Technology and Development Trend of Three-Type High Frequency Sonar[J]. Acoustics and Electronic Engineering, 2011(4): 51-53.
Review of Diver Detection Sonar System
SUN Yu-chen1,2, WANG De-shi1, LI Zong-ji1, JIANG Bin3, ZHANG Kai1, SUN Yu-xiang2, YU Wen-qiang4
(1. College of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China; 2. 92767thUnit, The People’s Liberation Army of China, Qingdao 266102, China; 3. Department of Navigation, Navy Submarine Academy, Qingdao 266100, China; 4. Wuhan Tianjing Technology Co., Ltd, Wuhan 430040, China)
Detecting a diver is difficult because of the low strength of underwater acoustic signals, which can secretly sneak into water bodies such as ports, islands, and reefs for reconnaissance and destruction, which is one of the key aspects of underwater early warning. In this study, first, the difficulties of underwater diver detection are discussed, and the principle and acoustic signal characteristics of active and passive sonar to detect divers are introduced. Then, the technical status of diver detection sonar(DDS) equipment is overviewed, including signal processing technology, remote transmission and power supply, installation and distribution, environmental adaptive ability, system reliability, multi-sonar combination, and multi-system collaboration. Key technologies for the development of DDS equipment, such as new material, matching layer, detection probability improvement, target automatic tracking and identification, vertical phased emission, and arraying technologies, are proposed to provide a reference for the research on DDS equipment in the industry.
diver detection sonar(DDS); underwater early warning; acoustic signal characteristic
孙玉臣, 王德石, 李宗吉, 等. 蛙人探测声呐系统发展综述[J]. 水下无人系统学报, 2021, 29(5): 509-523.
TJ67; TB566
R
2096-3920(2021)05-0509-15
10.11993/j.issn.2096-3920.2021.05.002
2020-11-17;
2021-02-05.
孙玉臣(1988-), 男, 在读博士, 主要研究方向为水声换能器设计及制造.
(责任编辑: 陈 曦)
猜你喜欢
小哥白尼(军事科学)(2022年5期)2022-08-17
舰船科学技术(2022年11期)2022-07-15
河北工业大学学报(2019年4期)2019-09-10
小学科学(2017年9期)2017-09-20
珠江水运(2017年7期)2017-05-11
现代兵器(2016年12期)2016-12-22
现代兵器(2016年12期)2016-12-22
科学大众·小诺贝尔(2009年12期)2009-07-21
物理(2009年3期)2009-05-21
物理(2009年3期)2009-05-21
