大型校园人群行为仿真与管控优化技术
2021-11-17 07:34李东芮钟竞辉
计算机仿真 2021年7期
陈 剑,李东芮,王 静,钟竞辉
(1. 肇庆医学高等专科学校,广东 肇庆526020;2. 华南理工大学计算机科学与工程学院,广东 广州 510000;3. 中新国际联合研究院,广东广州 510000)
1 引言
人群行为仿真是利用人群行为模型来模拟人群在特定场景中的宏观或微观行为的过程[1]。随着社会经济的发展和城镇化进程的加快,人群密集的大型公共场所(如火车站、飞机场和大型商场等)的数量急剧增加。利用人群行为模型对大型公共场所进行仿真与优化成为当前各国政府和学术界都十分关注的热点研究问题[2]-[4]。可靠的人群行为模型可用于预测大型公共场所中人群的分布和密度、人群疏散的瓶颈区域等,从而辅助场所的管理人员提前做好应对措施,防止发生公共安全事故,同时也可以对场所的布局合理性进行评估和优化等。目前,人群行为仿真已被成功用于飞机场和旅游区等公共场所的仿真,取得了令人鼓舞的应用成效[5]-[10]。
然而,人群行为仿真在校园安全方面的应用还比较缺乏,目前尚未有基于人群行为仿真的大型校园人群管控应用。现有的基于ZigBee技术的校园实时监控主要专注于帮助安保人员在异常事件发生后尽快采取措施,但无法预测未来将要出现的异常,也无法预测在假定场景下的人群行为[11]。因此,如何利用人群行为仿真技术对大型校园人群行为进行预测和管控优化,实现校园人群智慧管控,是智慧校园建设亟待研究的课题。
针对上述问题,本文提出了一个通用的大型校园人群行为仿真与管控优化框架,并以肇庆医学高等专科学校北岭新校区为例进行仿真,验证了所提出方案的可行性和有效性。
2 相关工作
本文旨在提出校园人群行为仿真与管控优化技术。因此,本小节对人群行为的研究现状以及相关应用领域进行概述。
2.1 人群行为建模与仿真
人群行为建模旨在定义特定场景下的人群行为,相对其它建模问题更有挑战性,因为人群的行为不但受到物理、心理和社会的影响[1],还涉及到路线规划、碰撞避免等复杂的行为。人群行为建模的方法可分为宏观行为建模与微观行为建模两大类。宏观的建模方法将人群视作整体,几乎不关注内部行人自身的特点及人与人之间的作用,而是用宏观的特征来描述人群,比如基于流的模型[12]。微观的建模方法则关注人群中个体的微观行为,常见的方法包括基于元胞自动机的方法[15]和基于智能体的方法[13][14][16]。其中,基于智能体的方法用具有智能的、与人的行为相似的智能体来代表行人,通过设定智能体的行为规则来获得微观和宏观的群体行为,具有建模灵活和建模质量高等优点,是当前人群行为建模的主流方法。
2.2 碰撞避免模型
碰撞避免模型通常被用于人群行为模型的底层,以实现人与人、人与物之间的碰撞避免。社会力模型[13]是一种经典的碰撞避免模型,它认为行人受到来自障碍物的斥力和来自目的地的引力,人的速度变化同时受到这些力的影响。另一种常用的模型是基于射线的碰撞避免方法RVO2[14]。与RVO2模型相比,社会力模型具有模型结构简单,建模过程灵活性高和建模质量好等特点。因此,本文采用社会力模型来实现底层的碰撞避免机制。下面简要介绍社会力模型的原理,更详细的内容可参阅[13]。
在社会力模型中,个体受到的合力由式(1)给出

(1)

障碍物分为两类,一类是动态障碍物,即其他行人,另一类是静态障碍物,即场景内的墙壁、装饰等短期内不会发生变动的障碍物。行人与行人之间的力由式(2)给出


(2)

-κg(ri-diW)(vitiW)tiW#
(3)
其中,式子右边的第一部分表示行人i与墙体W连线方向上的力,第二部分则表示行人i与墙体W之间的滑动摩擦力。同样,当行人与墙体没有接触时,压力与滑动摩擦力均为零。式(2)和(3)表明,行人之间或行人与静态障碍物之间的距离越小,行人受到的斥力越大,行人越有远离障碍物的趋势。当行人与障碍物有了接触时,会受到滑动摩擦力摩擦力和强大的压力。上述特点与一般的认知是吻合的。社会力模型属于基于智能体的算法,社会力模型与路径导航算法相结合后,仿真中的个体更加智能,能够产生具有真实感的人群行为仿真结果。
2.3 路径导航算法
A*算法[17]是利用广度优先搜索原理和适当的启发式,从起点向外扩张,找到抵达终点的最短路径的算法。相比Dijkstra算法,A*算法能在优秀的启发式的帮助下用更快的速度和更小的搜索空间找到最短路径。在扩张过程中,对于候选点n,A*算法用下式对其进行代价估计
f(n)=g(n)+h(n)
(4)
其中,g(n)是从起点到n经过的距离,h(n)是一个启发式函数,表示从n到终点的估测距离。每次扩张都选择f值最小的n点,直到抵达目的地,A*算法求最短路径的过程结束。此时,从目的地开始,寻找每个点的上一个点,连起来就得到了最短路径。
针对具体的问题特性,A*算法的变种被提出。D*算法[18]即动态的A*算法,针对机器人在场景障碍物分布动态变化的情况下的寻路问题提出,该算法从目的地向起点进行搜索,每个结点记录当前到终点的值和该值的历史最低值。在机器人沿着所得路径行进却碰到障碍物时,则在当前位置重新规划路径并更新结点记录的信息。LPA*[19]是另一种动态A*算法,该算法从起点向目的地进行搜索,当最短路上出现障碍物或清除了障碍物时,路径会根据需要重新进行规划。另一种A*算法D* Lite[20]与D*一样利用了反向搜索,与LPA*一样不断重新规划路径,但与LPA*对整条路径进行更新不同的是,D*规划的是机器人所在位置到目的地的路径。由于本文涉及的校园场景固定,故不需要采用动态算法,直接采用A*算法即可。
2.4 数据驱动的人群行为仿真
随着监控技术的发展,大量的公共场所监控视频被获取,为数据驱动的人群行为仿真提供了数据。在设计好人群行为模型的整体框架之后,数据驱动的人群行为建模方法将从真实数据中提取信息,以得到更真实的仿真人群。近年来,大量数据驱动的人群行为建模与仿真技术被提出。在Kluepfel等人提出的方法中[21],人群行为被建模为元胞自动机,其行走速度、元胞大小等参数都根据真实数据来设置。Bera等人[22]则根据历史数据调整RVO2模型的参数,使调参后的RVO2模型可以被用于预测行人轨迹。Tan等人[23]提出的数据驱动模型关注起点、终点和路径的选择,使用差分进化算法来根据视频的密度分布调整相关参数。在自动生成人群行为规则的演化计算框架[16]中,真实数据既提供了人流量、路径分布等输入参数,也作为仿真效果好坏的参考依据。在数据驱动方法中,参数的设置和调整更有依据,建模人员也不必从无到有,可以更有效率地生成具有真实感的人群。
3 大型校园人群行为仿真与管控优化框架
为了实现校园的人流智能管控,本小节提出大型校园人群行为仿真与管控优化框架。如图1所示,本文所提出的框架主要包含以下四个模块。
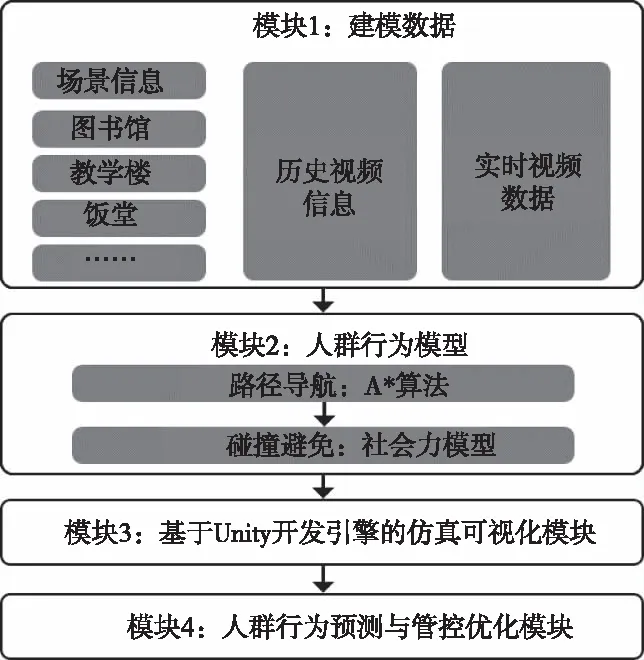
图1 大型校园人群行为仿真与管控优化框
第一个模块是建模数据模块。智慧校园人群仿真所需的数据信息包括场景信息、历史视频信息和实时视频数据信息。场景信息包括校园内的可行走的区域分布、障碍物分布、出入口分布等。历史视频信息提供了校内人群的主要路线分布、各路线上的人群密度分布、各入口的人流量等,比如,师生下课后走向饭堂,可能从教学楼不同位置开始出发,经过不同的路线抵达饭堂。所提供的环境参数越准确,利用这些参数得到的人群仿真就更接近真实情况,更具参考意义。实时视频数据可以利用监控录像帮助模型实现动态的参数变化,使得模型能够更加准确地预测未来人群。场景、人流量的变化有时是无法预知、突然发生的,比如突发事件导致人流量变化、可行区域变化等。此时,如果能够提供实时的视频数据,就能及时根据实时信息进行仿真,快速定位安全隐患,迅速采取措施。
第二个模块是人群行为模型。人群行为模型的功能是根据场景信息提供的可行区域信息、障碍物信息和出入口位置信息,历史视频提供的各路线起点终点对,以及实时视频提供的实时变化信息,利用路径导航方法来引导个体行走,从而产生宏观的人群行为。本文框架采用关键点与A*算法结合的方式实现路径导航。其中,关键点由人为设定,用于设置起点到终点经历的关键位置。关键点确定后,再利用A*算法确定从一个关键点到达另一个关键点的路径。个体在移动过程中,需要尽力规避静态障碍物和其他行人,并以尽可能短的路线长度抵达目标(即关键点或终点)。由于社会力模型具有实现简单和建模灵活可靠等特性,本框架选择社会力模型为仿真提供具有真实感的碰撞避免行为。
第三个模块是仿真可视化模块。本文所提出的可视化模块支持2D和3D显示功能。其中,2D的仿真主要通过融合第二个模块产生的人群轨迹数据、环境障碍物信息以及JAVA提供的2D绘图开发接口实现。为了实现3D的仿真可视化,首先建立场景的3D模型,然后将环境模型以及有人群行为模型产生的人群移动轨迹导入Unity开发引擎中,从而产生3D的可视化仿真。
第四个模块是人群预测与管控优化模块。人群仿真将在给定的场景中,按照指定的或从历史视频信息所得的人流量,让个体持续不断地从入口进入场景,并沿着指定的或从历史视频信息所得的路径,走向目的地。通过可靠的人群仿真,校园管理人员可以直观地发现场景的瓶颈区域或其它安全隐患,及时采取措施,防患于未然。人群仿真除了可以基于正常情况下的参数进行仿真,还可以进行极端情况下的仿真。考虑到大型的公共场所在周边有大型活动时,人流量可能远高于平时,带来平时不会出现的安全问题。为此,可以调整人群仿真模型中的入口人流量参数,对极端情况进行仿真和预测。当确实有大量行人经过时,管理人员可以根据仿真的结果提前对存在隐患的区域采取措施。场景内的可行区域、障碍物分布可能发生变化,此时也可以通过分析修改参数后的仿真结果来判断这些变化是否会带来问题,以便及时采取应对措施。
4 仿真与分析
4.1 仿真场景介绍以及仿真参数设置
为了测试本文所提出方法的有效性,本小节以肇庆医学高等专科学校北岭新校区为例进行校园人群行为仿真。肇庆医学高等专科学校北岭新校区于2017年开始建设,占地面积约53万平方米,其布局如图2所示。防洪堤在校园内穿插而过,防洪堤以南最西侧是运动区,其南边是校园正门,正门正对图书馆,图书馆西南和东南各布置一处公共教学组团。防洪堤以北的东西两侧各布置一处生活区组团,并分别配套食堂;东侧的生活区组团西边是运动区,与校园西南处的运动区相对;中央区域是实验楼群。该校区可容纳12000名以上的学生,生活区分布在校园两侧的设计使得学生与教学、生活设施的距离均在550米以内,步行十分钟即可到达。本实验通过对步行人群进行仿真,探索校园内人流在不同情况下的分布,为校园人群管控和布局优化提供辅助决策工具。

图2 校园俯瞰图
在模块1中,根据校园的CAD图设置障碍物坐标和出入口的位置。肇庆医学高等专科学校北岭新校区一共包含30栋建筑物,包括学生宿舍11栋,图书馆1栋,教学楼2栋,实验楼5栋和食堂2栋,总计有3个出入口。由于校区尚未建成投入使用,视频数据尚未获得。因此,人为设定各出入口人流服从泊松分布。在模块2中,从入口中涌现的个体随机选择一个出口作为最终的目标,并沿着关键点到达目标,其中关键点之间的路径导航采用A*导航。校园最终设置的障碍物信息和关键点如图3所示。其中,灰色部分为不可行走区域,白色部分为可行走区域,圆圈为关键点。仿真模型的主要参数设置如表1所示。

图3 用于校园路径导航的关键点配置图
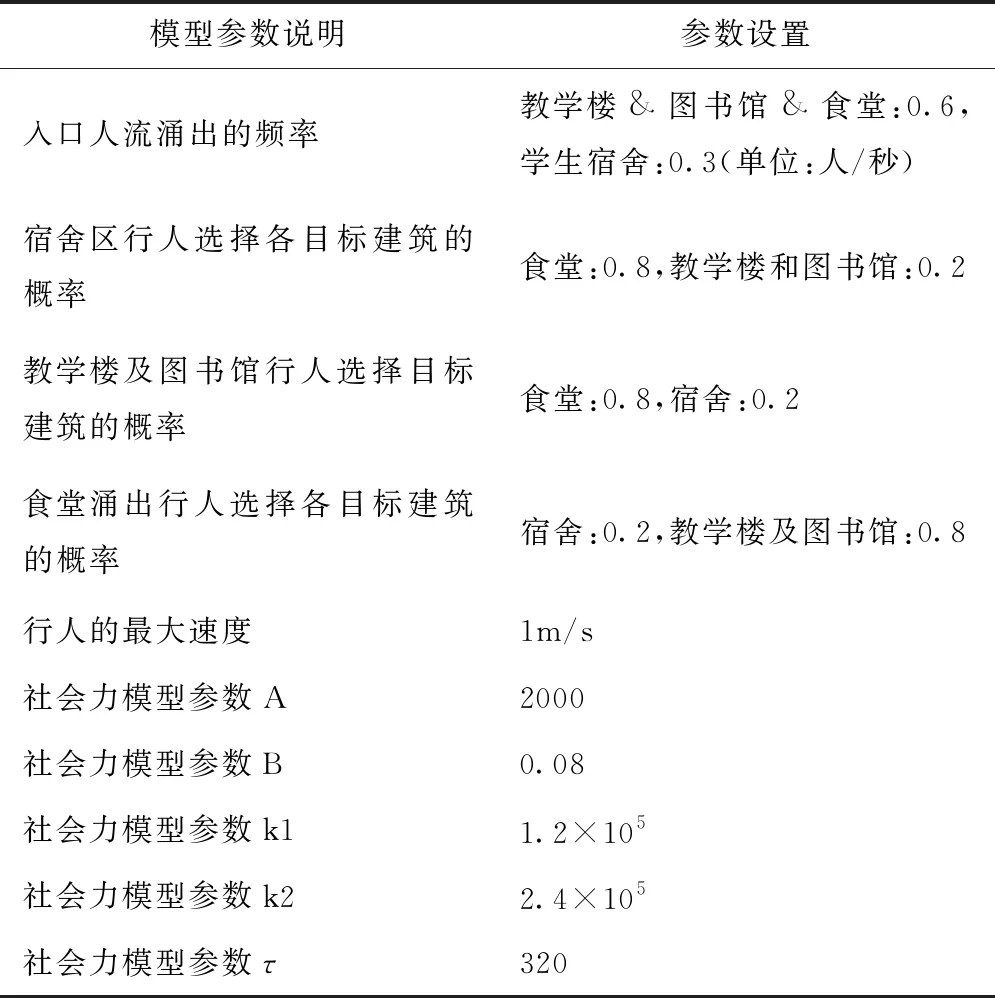
表1 仿真模型的主要参数设置
4.2 校园人群行为仿真结果与管控分析
图4所示为本文所提出的框架实现的校园人群3D仿真结果示意图(具体的仿真视频可通过如下链接观看:https://www.jianguoyun.com/p/Dfg-XcgQrdfiCBi20tsD)。通过仿真发现,校园的人流在正常情况下是比较顺畅的,不存在人流密集的瓶颈。上述仿真结果说明校园的布局设计是比较合理的。
校园防洪提南北两侧两座桥(即图4中的桥梁1和桥梁2)是连接教学楼、图书馆和生活区与饭堂的交通要道,在就餐时间会产生一定的拥堵现象。为了测试在极端情况下的人流状况,利用本文提出的框架对校园就餐时人流的情况进行仿真和分析。设计了三种方案:①方案1:人流未加管控,两座桥都可双向同行;②方案2:遇到极端情况,桥梁2无法同行,所有行人从桥梁1通过;③方案3:管控桥梁单向同行,由北往南的行人由桥梁1通过,由南往北的行人则由桥梁2
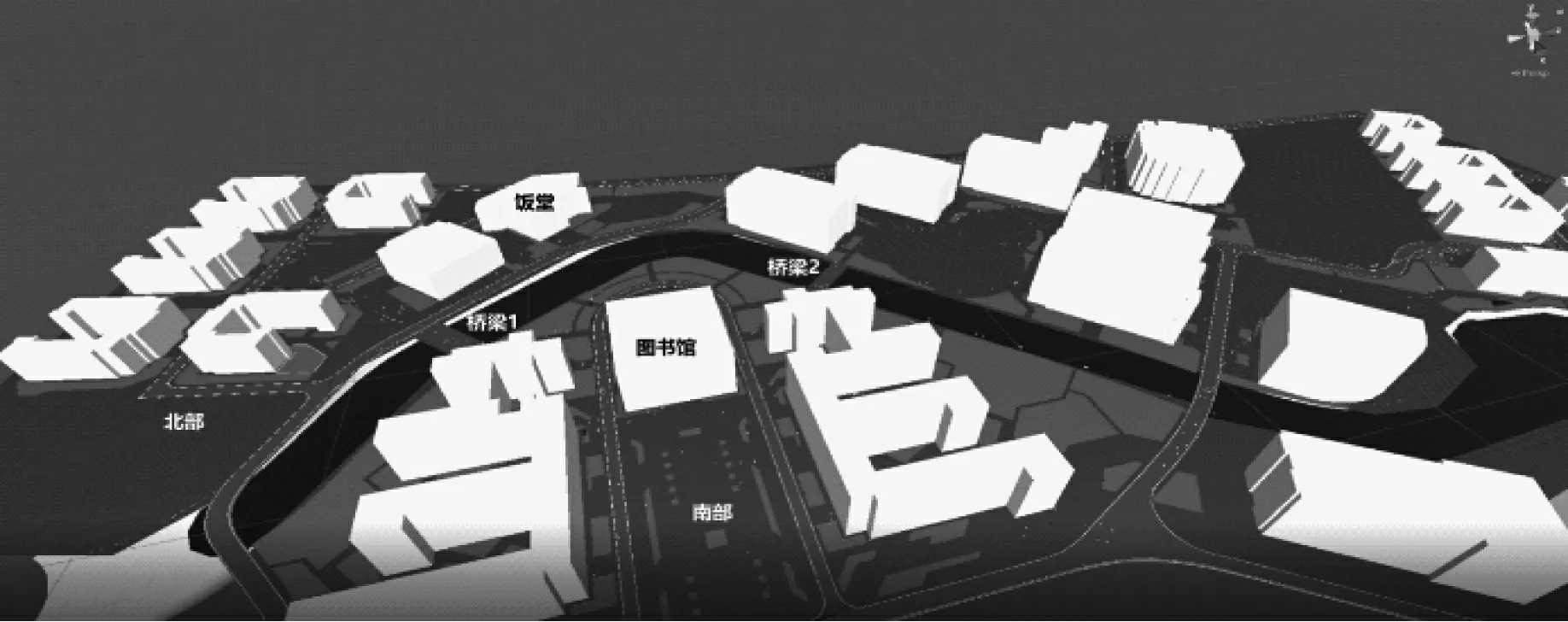
图4 正常状态下的校园人群行为仿真3D效果图
通行。由于是就餐时间,各栋建筑物涌出的人流大部分选择往饭堂移动,而从饭堂涌出的人流大部分往南边的图书馆等地移动。记录了两座桥梁在5秒间隔时间内的通行人数以及行人在桥梁上的平均通行时间。图5和图6分别为三种方案下的通行人数和人流通行时间随时间变化的情况。从仿真结果可以发现如果人流未加管控(即方案1),两座桥梁上的人流会出现一定的拥堵现象,但是总体还能保持人流持续通行。如果桥梁2被禁止通行(即方案2),所有南北通行的人都由桥梁1通行,则桥梁1很快出现了严重拥堵,通行人数迅速下降到接近0。如果采用方案3,则人流通行比较顺畅,人流的通行时间是三种方案中最少的。通过上述仿真测试,可以得出以下结论:若南北通行人数非常大的时候,可以采用单行管控的方式来避免桥梁的拥堵,提高校园的人流通行安全性和效率。

图5 通行人数随时间变化的关系

图6 人流通行时间随时间变化的关系
5 小结与讨论
本文提出了一个通用的校园人群行为仿真与管控优化框架,并以肇庆医学高等专科学校北岭新校区为例进行了仿真和测试。仿真结果显示本文所提出的框架能产生可靠的仿真结果,并能用于压力测试,辅助校园管理人员管控人流。未来有几个值得进一步研究的方向。一方面,近年来,大量智能优化算法(如遗传算法和蚁群算法等)被提出用于解决难以建模的复杂优化问题,将智能优化算法与本文所提出的框架结合,实现校园布局设计优化是值得研究的课题。另一方面,随着传感技术的发展,校园监控系统已能获得大量的人群数据,将传感设备获取的人群轨迹数据与本文所提出的框架结合,实现数据驱动的平行仿真,为校园管理人员全面感知校园人流状态以及辅助管理决策亦是未来值得深入研究的课题。此外,将本文所提出的框架应用于其它大型公共场所(如飞机场和大型商场等)的管理也是一个值得研究的课题。
猜你喜欢
中国典型病例大全(2022年9期)2022-04-19
医学食疗与健康(2021年27期)2021-05-13
意林(2021年5期)2021-04-18
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
扬子江(2019年1期)2019-03-08
好孩子画报(2019年10期)2019-01-10
小天使·一年级语数英综合(2017年6期)2017-06-07
婚育与健康(2016年12期)2016-12-29
中国民族民间医药·下半月(2014年4期)2014-09-26