
硬盘磁头滑块径向飞行特性分析
2021-11-17 12:06毛薪然杨廷毅崔家志龚西鹏
振动与冲击 2021年21期
毛薪然, 杨廷毅, 崔家志, 龚西鹏
(山东理工大学 机械工程学院, 山东 淄博 255049)
随着现代社会计算机技术的不断发展,人们对于硬盘的存储量需求日益增加,硬盘向着体积越来越小容量越来越大的方向发展[1],磁头滑块的飞行高度早已达纳米级别[2]。随着磁头滑块飞高的不断降低,就需要对头/盘界面气膜润滑方程进行修正。在FK修正模型的基础上,提出了LFR修正模型[3-5],在提高了计算效率的同时,还有着良好的抗冲击性能。在修正模型的基础上,对于硬盘磁头滑块飞行特性的研究,主要集中于动态和静态两方面,杨廷毅等[6]使用摄动法研究了磁头滑块受到外界干扰时的动态飞行特性;Segu等[7]利用有限单元法(FEM)研究了硬盘磁头滑块的静态和动态特性。Zhang等[8]研究发现PFPE润滑剂的用量随着磁头滑块的俯仰角、侧倾角和飞行高度和磁盘转速的增大而减小。Dai等[9]研究了磁盘转速和滑块飞行高度下对润滑油桥以及磁头滑块压力的影响。Lim等[10]研究得出磁盘曲率可以减小最小飞行高度和增加滑块的俯仰角和滚动角来降低外界冲击影响。
在硬盘工作过程中,磁头滑块通过传动手臂的作用沿着磁盘的半径方向做径向运动以进入各磁道来进行数据的读写等操作,即磁头滑块的寻轨过程。由于径向位置的不同,磁头滑块所受的气膜承载力将发生变化,从而使滑块产生振动现象。Charlotte等[11]研究了不同位置时瞬时径向速度与磁盘转速之间的关系;Shi等[12]研究了磁盘半径对磁头滑块压力的影响;Cordle等[13]对HAMR硬盘驱动器中磁盘半径和磁头偏角的影响进行了实验研究。柏添[14]研究了不同磁盘半径位置对承载力的影响,半径越大,最大气膜压力越大。针对动态寻轨过程,Liu等[15]以承载面形状的磁头为列,对不同寻轨速度的影响下的滑块斜角、气流速度方向等的变化情况进行了研究;岳振兴等[16]模拟了磁头在半径方向上寻轨时,改变磁头斜角值所引起的磁头飞行高度、俯仰角、侧倾角等的变化情况。王蓓蕾等[17]研究了当正弦变化规律下的磁头滑块径向速度对气膜承载力的影响,速度幅值越大,气膜承载力的不稳定性越差。Kim等[18]使用准静态近似来进行滑块轨迹追踪模拟,研究了有效倾角对槽深、槽宽、槽距的影响。Wang等[19]通过精确控制速度,实验发现寻轨速度过大是造成磁头/磁盘界面不稳定的影响因素之一;Zhang等[20]模拟了空气和氦气驱动下的粒子运动轨迹,研究发现寻轨速度越大,粒子与磁盘表面碰撞次数越多。Tan等[21]对比研究了空气和氦气环境下,寻轨过程对脱轨残余振动的影响,研究发现氦气环境下跟踪精度高,且寻轨时间的影响较小。
由此可以看出,磁头滑块所处磁盘半径位置和寻轨速度的不同对于滑块各方面的性能以及磁头滑块飞行特性有着明显的影响。因此,在此基础上,本文针对磁盘半径位置这一影响因素做了进一步研究,综合分析其对磁头滑块静态(受力)和动态飞行特性的影响,进一步模拟分析了磁头滑块动态径向飞行过程中的最小飞高、俯仰角和侧倾角的变化情况,并对径向寻轨速度的影响情况作了对比分析。
1 气膜润滑方程的求解
已知考虑磁头/磁盘界面气体稀薄效应LFR模型的Reynolds方程为
(1)
式中:P、H分别为量纲单位一化后的磁头滑块所受压力和头盘之间的气体高度;X和Y为无量纲定义域;Pa是周围环境的压力;q为流量系数;Λx、Λy分别为x、y方向的空气轴承数;p、h为磁头滑块的压力和飞行高度,h1为滑块最小飞行高度;U、V分别为滑块在x和y方向的磁盘速度;μ表示气体黏度,C1和C2为常系数。磁头/磁盘界面示意图如图1所示。
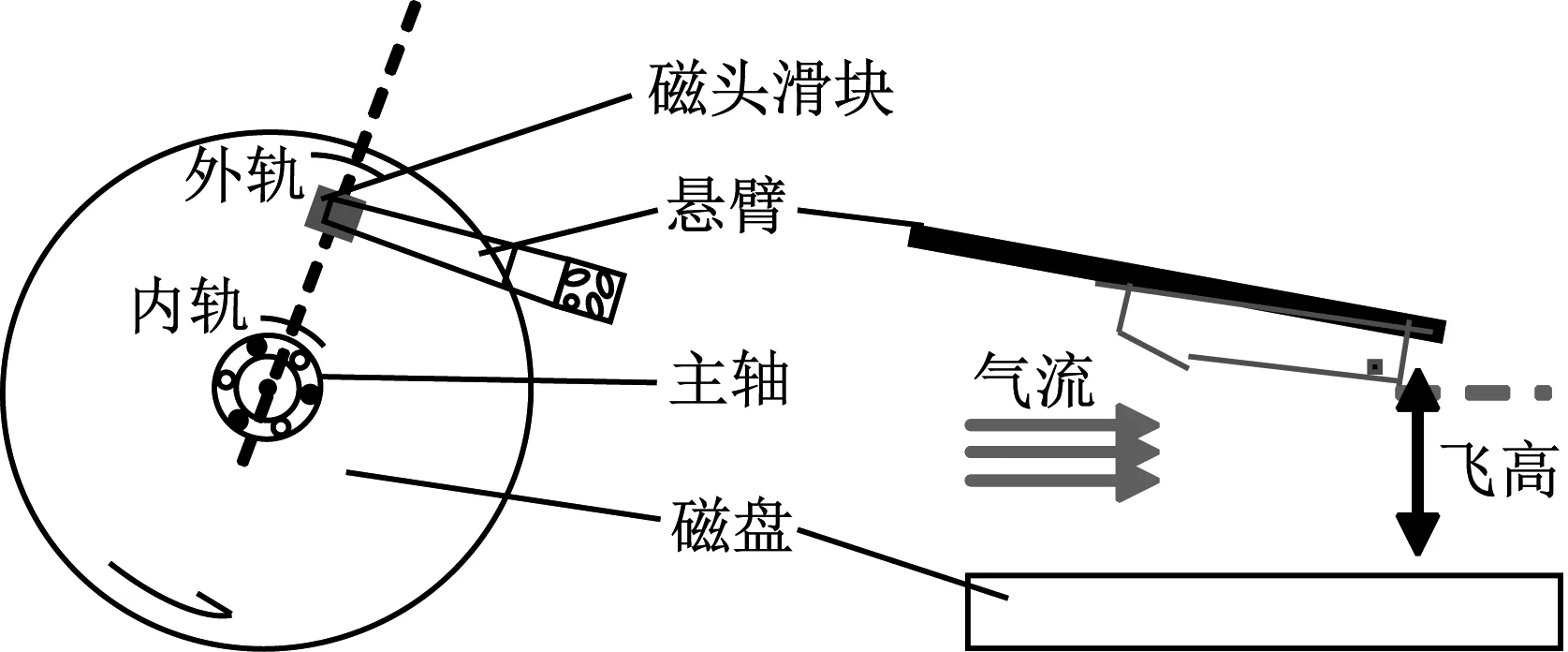
图1 磁头/磁盘界面Fig.1 Head/disk interface
采用有限体积法[22]将求解域进行离散,从而实现控制方程式(1)的离散,来求解磁头滑块的受力情况。如图2所示,为有限体积法求解气膜润滑方程过程中求解域网格的划分情况,图中阴影部分为节点P的控制容积,E和W分别为节点P相邻的东西侧节点,S和N分别为南北侧节点。e、w、s、n为控制容积边界,ΔX、ΔY为控制容积长度。

图2 有限体积法网格划分Fig.2 Mesh division by finite volume method
选取有限体积法的指数差分格式进行计算,有更高的计算效率且模拟效果好,较之中央格式、上风格式、QUICK格式等差分格式,其计算结果在不同网格密度下均保证了良好的稳定性,且其计算精度与精确解基本一致。在控制容积内,气膜润滑方程指数格式的离散方程为
(2)
式中:Pe为网格PELECT数,Pe=ΔXΛxH/q;aP、aW、aE、aS、aN为各节点处系数;PP、PW、PE、PS、PN表示各节点处的滑块压力,下标w、e、s、n则分别表示节点P的各边界处的参数值。求解式(2)即可得出磁头滑块的压力分布情况,采用松弛法进行计算,且松弛因子的取值范围ω∈[0,1]。
2 动力学方程的求解
利用有限体积法求解出的压力分布情况后,需要结合磁头滑块的动力学方程分析力和力矩的变化来求解磁头滑块的飞高、俯仰角和侧倾角,以此来分析各因素对磁头滑块径向飞行特性的影响。磁头滑块物理模型如图3所示,图中h1表示磁头滑块竖直方向的最小飞行高度,α和β分别表示磁头滑块重心绕坐标轴x轴的转动和y轴的转动,即俯仰角和侧倾角。
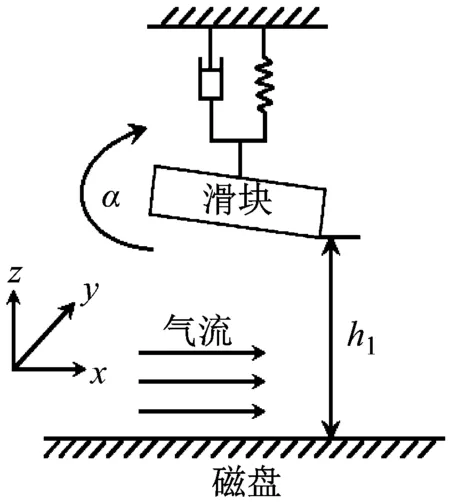
图3 磁头滑块物理模型Fig.3 Thephysical model of slider
已知磁头滑块三个方向的受力情况可由其压力值求得,其计算式如下
(3)
式中:W为竖直方向的滑块气膜承载力;Mα和Mβ分别为x方向和y方向的俯仰转矩和侧翻转矩;Xg表示质心处的横坐标。因此,硬盘磁头滑块的力激励振动微分方程即动力学平衡方程可表示为

(4)
式中:X和F分别表示广义位移向量和外界激励向量,且X=[Zαβ]T;Z、α、β分别表示磁头滑块的飞行高度、俯仰角和侧倾角;F=[WMαMβ]T;M、C、K分别表示广义的质量矩阵、阻尼矩阵和刚度矩阵。选取负压型滑块进行研究,滑块长为1 mm,宽为0.8 mm,滑块各参数取值参考文献[23],进一步计算得出各矩阵数值如下
(kg,m)
(N,m,rad,s)
(N,m,rad)
硬盘磁头滑块的压力中心是用来表征滑块受力变化情况的一个重要参数,并会对磁头滑块两个方向的转矩产生影响。磁头滑块压力中心的计算式为
(5)
3 滑块径向飞行动态模拟计算步骤
在硬盘正常运行过程中,磁头滑块会在悬臂的作用下沿着磁盘半径做往复运动来实现信息的读取[24]。当滑块在某一位置达到稳态之后,改变滑块的径向位置,会使滑块的承载力发生改变,相应地滑块飞行高度、俯仰角和侧倾角等参数值也会发生改变。由于磁头滑块的径向飞行是一个连续过程,为了模拟滑块动态飞行过程中,磁盘半径位置的变化对滑块飞行特性的影响,对磁头滑块径向飞行动态过程进行了模拟。
使用MATLAB编程实现上述计算过程,流程框图如图4所示,具体模拟滑块动态飞行过程的计算步骤如下:


(4) 重复步骤(1)~步骤(3),直到滑块所处磁盘半径位置到达预期值即R=Rf时,跳出上述循环结束计算,并绘制磁头滑块的最小飞高、俯仰角和侧倾角在这个动态径向飞行过程中的变化图象,进行分析。
在上述步骤中,磁盘半径位置的变化量ΔR=Ri+1-Ri,和时间的变化量Δt=ti+1-t,取值与滑块径向寻轨速度有关,根据速度取值计算。
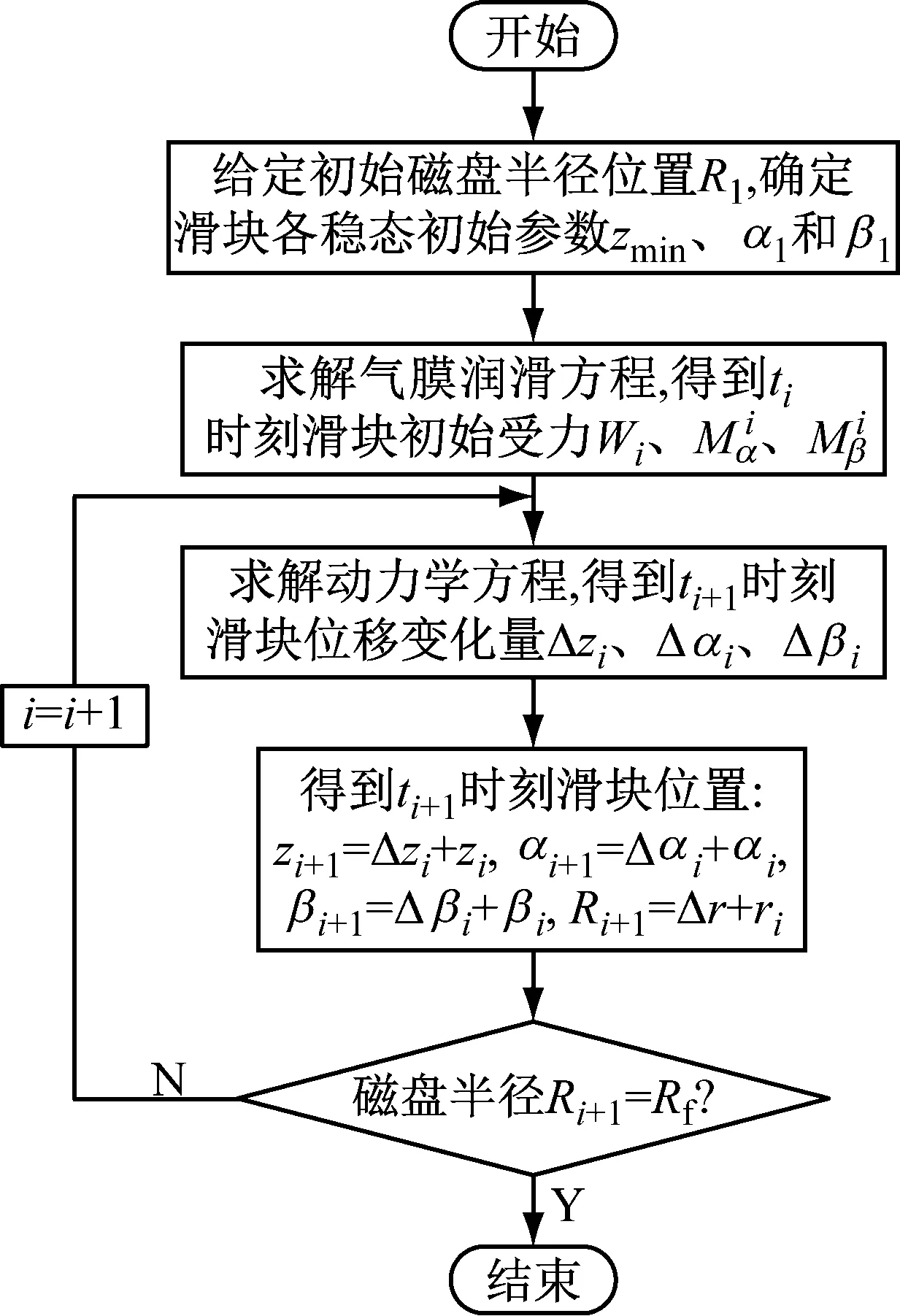
图4 滑块动态飞行模拟计算流程Fig.4 Calculation flow of sliding block dynamic flight simulation
4 数值模拟与分析
4.1 径向位置对受力的影响
根据式(1)利用有限体积法计算求解滑块受力情况,分析径向位置对磁头滑块承载力和两个方向压力中心Xc、Yc的影响。不同初始最小飞高和俯仰角条件下,气膜承载力随滑块半径位置的变化趋势如图5和图6所示。可以得出,当滑块最小飞高取值一定时,滑块的气膜承载力随着磁盘半径的不断增大而增大;对比各曲线数值,随着滑块最小飞高的不断增大,气膜承载力的增大幅度有所减小;随着滑块初始俯仰角的增大,滑块的气膜承载力增大的幅度越来越小,曲线趋于平缓。
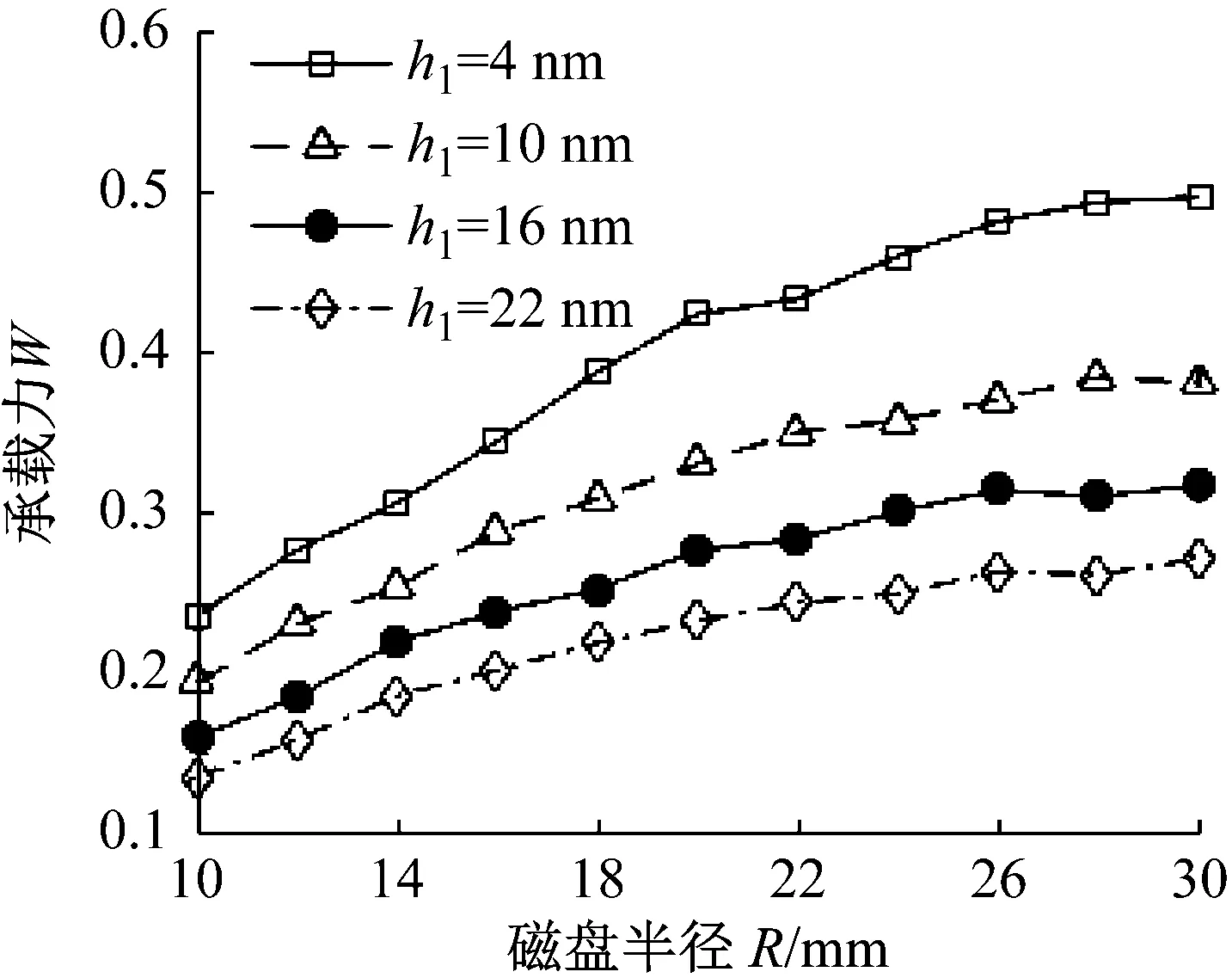
图5 飞高不同时气膜承载力随磁盘半径的变化趋势Fig.5 Variation trend of air bearingforcewith disk radius atdifferent flying heights
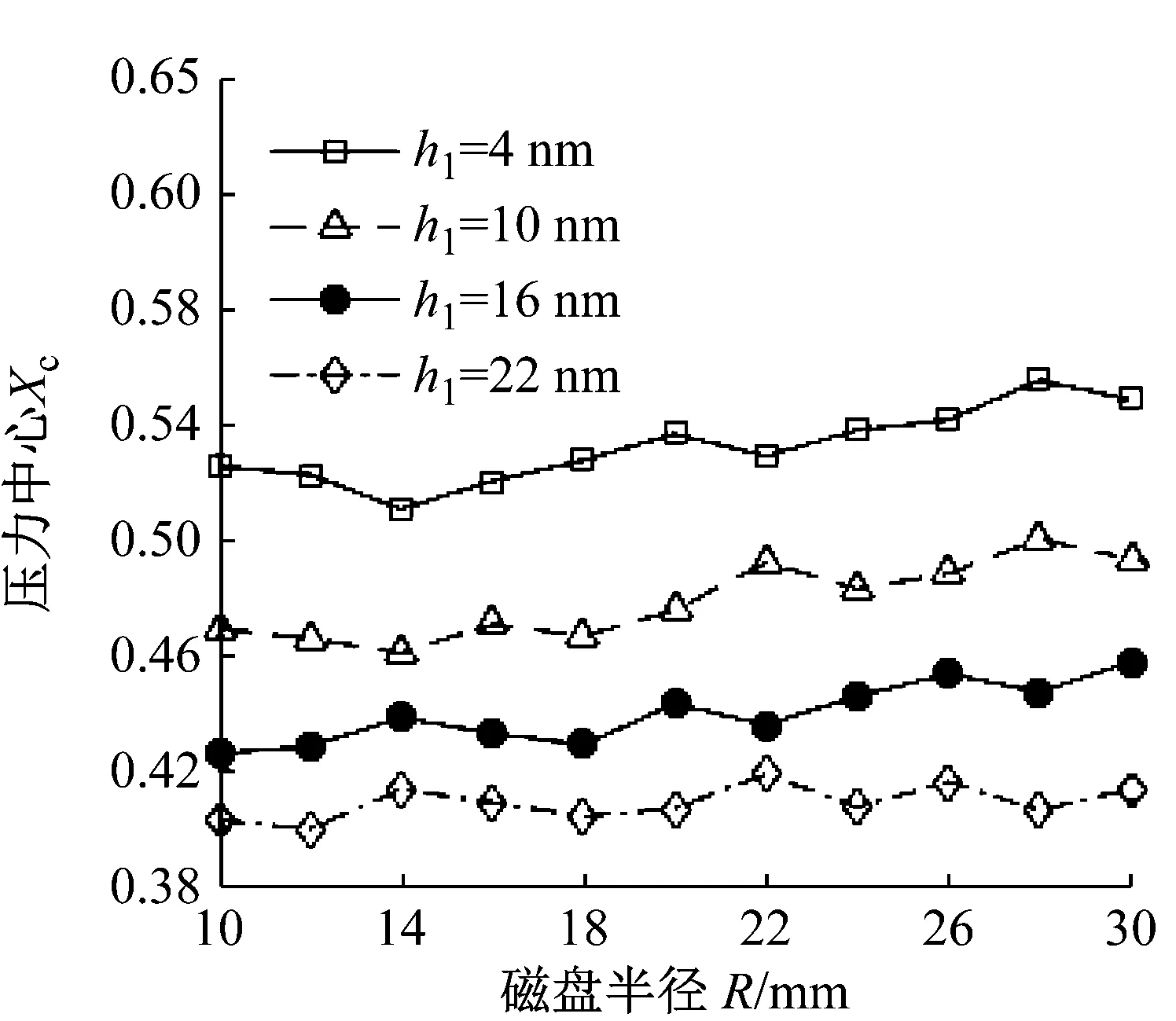
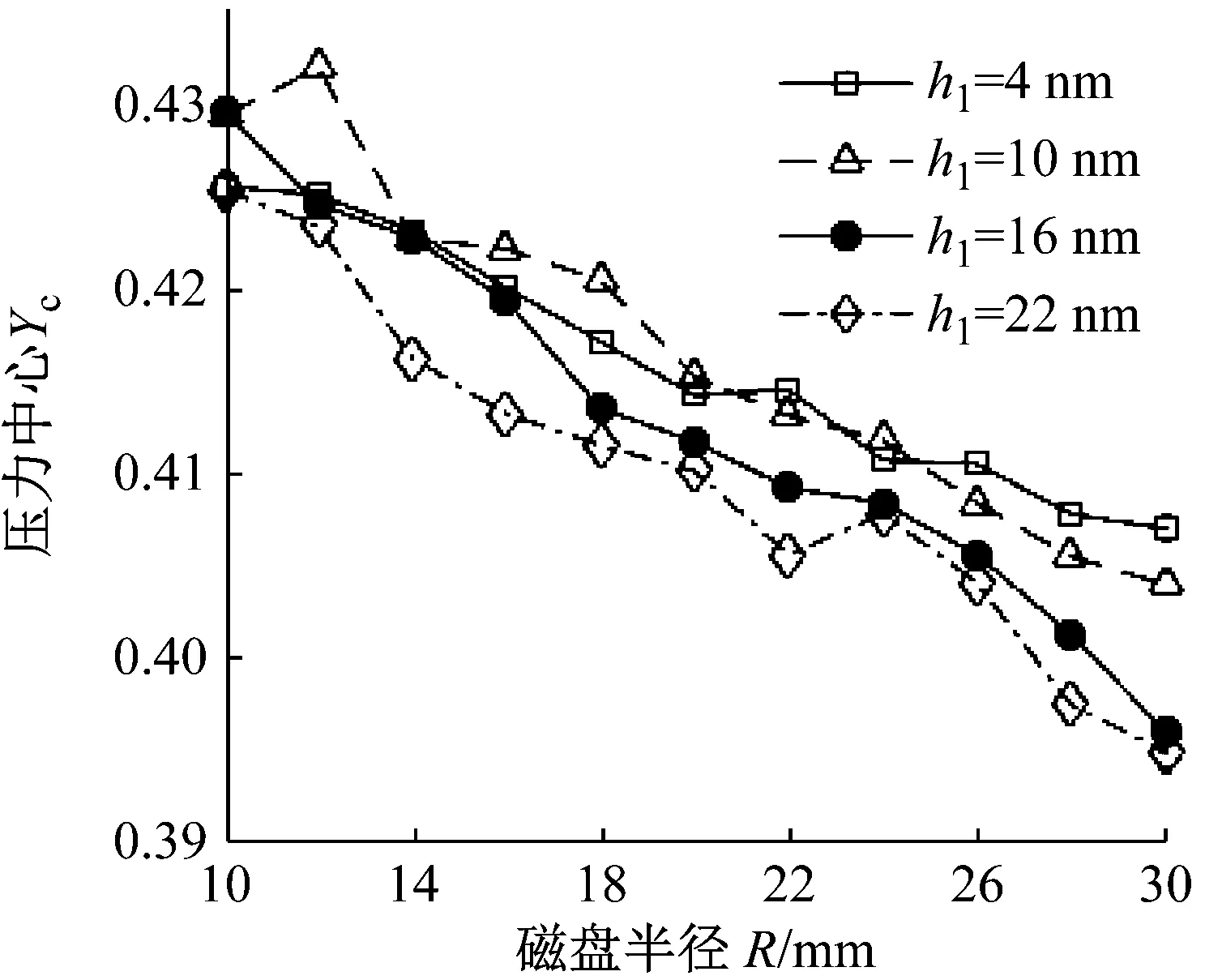
由式(5)求得硬盘磁头滑块两个方向的压力中心,在不同初始飞高和俯仰角条件下,随滑块半径位置R的变化趋势如图7和图8所示。由图7可得,压力中心Xc随磁盘半径的增大,出现波动,整体上有小幅度增大,且滑块的最小飞高越大波动幅度越小,逐步趋于稳定;初始俯仰角大于等于160 μrad时,压力中心Xc随磁盘半径的增大不断减小,反之则不断增大。从图8中可以看出,压力中心Yc随磁盘半径的增大,亦出现波动情况,整体上呈现减小趋势,且滑块的最小飞高越大波动幅度越小,但就整体而言,在此期间飞高和俯仰角取值的影响较小。
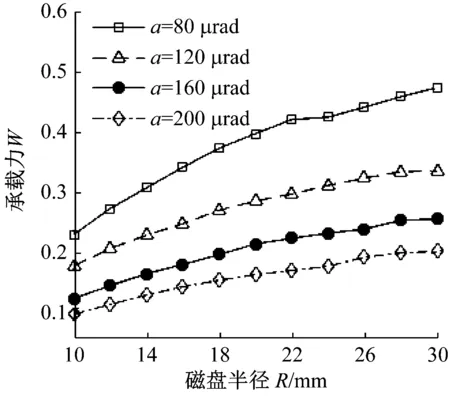
图6 俯仰角不同时气膜承载力随磁盘半径的变化趋势Fig.6 Variation trend of air bearing force with disk radius atdifferent pitch angles
(a) 飞行高度不同时

(b) 俯仰角不同时图7 压力中心Xc随半径位置的变化趋势Fig.7 Variation trend of pressure center Xc with radius position
(a) 飞行高度不同时
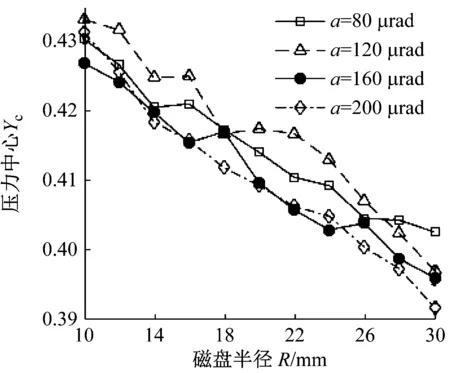
(b) 俯仰角不同时图8 压力中心Yc随半径位置的变化趋势Fig.8 Variation trend of pressure center Yc with radius position
4.2 径向位置对动态飞行特性的影响
硬盘磁头滑块在不同半径位置受气膜承载力激励的影响会出现振动衰减过程,如图9所示,磁盘半径位置取值分别为10 mm、20 mm和30 mm,对滑块沿三个自由度方向的滑块最小飞高、俯仰角和侧倾角位移时程变化情况进行了对比分析。
如图9(a)所示,令滑块的初始最小飞高为z0=20 nm,随着磁盘半径的增大,磁头滑块飞高变化幅度增大,当半径R=10 mm时,滑块最小飞高的最大值在23.2 nm左右,而当磁盘半径R=30 mm时,最小飞高的最大值超过28 nm;磁盘位置变化对振动幅度的衰减速度有一定影响,R=10 mm时,在t=1.1 ms处基本到达稳态,在半径R=30 mm时,t=1.4 ms时尚未到达稳态。
由图9(b)可知,令磁头滑块的初始俯仰角的取值为α0=100 μrad,在半径位置为10 mm时,俯仰角最大值为116 μrad左右,在磁盘半径为30 mm时,俯仰角最大值在146 μrad左右,因此半径越大,俯仰角变化范围明显增大;随着磁盘半径的增不断大,俯仰角变化幅度增大程度有明显减缓,从图中可以看出,忽略滑块初始稳态飞高,当R=10 mm时波动范围在10 μrad左右,R=20 mm时在30 μrad以内,R=30 mm时在40 μrad以内。

(a) 飞行高度
不同磁盘半径下,磁头滑块的侧倾角随时间变化曲线如图9(c)所示。其中初始侧倾角β0=10 μrad,随着磁盘半径的增大,侧倾角振动范围增大,半径为10 mm时,侧倾角最大值为36μrad左右,在磁盘半径为30 mm时,侧倾角最大值在68 μrad左右,增大幅度达到89%,因此磁盘半径对侧倾角数值变化影响较大;从图中可以看出,不同半径位置下,滑块到达稳态的时间基本一致,因此其衰减速度随着半径位置的增大而明显增大。
4.3 滑块径向飞行动态特性分析
滑块径向飞行动态模拟过程中滑块各参数初始值设置为:最小飞行高度zmin=20 nm,俯仰角α=100 μrad,侧倾角β=10 μrad;另外,一般磁盘的寻道时间在5~30 ms,因此将磁头滑块径向寻轨速度(与悬臂有关)设置为1 m/s,因此整个飞行过程需要10 ms。
如图10所示,在气膜承载力和悬臂支撑力的共同作用下,磁头滑块动态径向飞行的初始阶段,飞行高度、俯仰角和侧倾角均出现明显的波动,随着飞行的进行,该作用力的影响即波动幅度逐渐减小。滑块从磁盘半径10 mm处到达半径20 mm处的过程中,在半径位置为10~11 mm时,滑块的飞高变化幅度最大,最小值在20.5 nm左右,最大值在23.3 nm左右。随着半径的不断增大,滑块飞高在整体上程增大趋势。随着磁盘半径的不断增大,滑块俯仰角在整体上呈现增大趋势,在磁盘半径位置为10~11 mm和14 mm左右处出现较大波动。滑块侧倾角在整体上呈现增大趋势,但整体上增加幅度很小;侧倾角只在磁盘半径位置为10~11 mm出现较大波动,特别是在磁盘半径R=10 mm左右时,变化幅度最大达到近23 nm。

(a) 飞行高度
4.4 滑块寻轨速度对动态径向飞行特性的影响
在磁头滑块的动态径向寻轨过程中,不仅滑块所处的半径位置在不断改变,滑块的径向寻轨速度对其动态飞行特性也会产生一定的影响。为此对滑块动态
飞行过程中不同寻轨速度下的滑块径向飞行特性加以对比分析,磁头滑块径向寻轨速度取值分别为0.5 m/s、1 m/s和2 m/s,如图11所示。
如图11(a)所示,随着磁头滑块径向飞行速度的不断增大,最小飞高的变化幅度增大,特别是在10~11 mm处,但是后期飞行过程中波动幅度减小,滑块飞行过程中飞高变化较平稳。如图11(b),滑块刚开始运动时,俯仰角变化幅度随速度增大而增大;在后期飞行过程中,滑块俯仰角受滑块径向寻轨速度的影响较大,移动速度越慢俯仰角的变化幅度越大,特别是在磁盘半径位置在13~16 mm时。由图11(c)可得,在半径位置为10~11 mm处,随着移动速度的增大,侧倾角的变化幅度明显增大;后期飞行过程中,飞行速度越慢俯仰角的变化越明显。在滑块的飞行过程中三个基本飞行参数互相影响,飞高的变化也会引起俯仰角侧倾角的变化,由图5可以看出在12~14 mm内时,气膜承载力的增大幅度明显增大,进一步导致滑块最小飞高,俯仰角和侧倾角也发生了明显波动。
为了进一步研究寻轨速度对磁头滑块径向飞行特性的影响,本文进一步增大了寻轨速度的大小,分别取径向速度值为2.5 m/s、3 m/s和5 m/s时滑块的最小飞高变化情况做了对比分析。
如图12所示,可以看到,随着寻轨速度的不断增大,气膜承载力不断增大,导致滑块飞行越来越不平稳,当速度在2.5 m/s时滑块的飞高变化趋势已经发生明显变化,较之前速度小于2.5 m/s时,振动衰减速度减小明显;当速度增大到3 m/s时,随着磁盘半径的增大,最小飞高的波动幅度越来越大;当速度为5 m/s时,半径位置还未到16 mm处滑块最低飞高已经低于7 nm,继续运行下去必然会导致触盘现象发生,从而损坏磁盘。因此在正常工作过程中,磁头滑块的径向运行速度不宜过快。
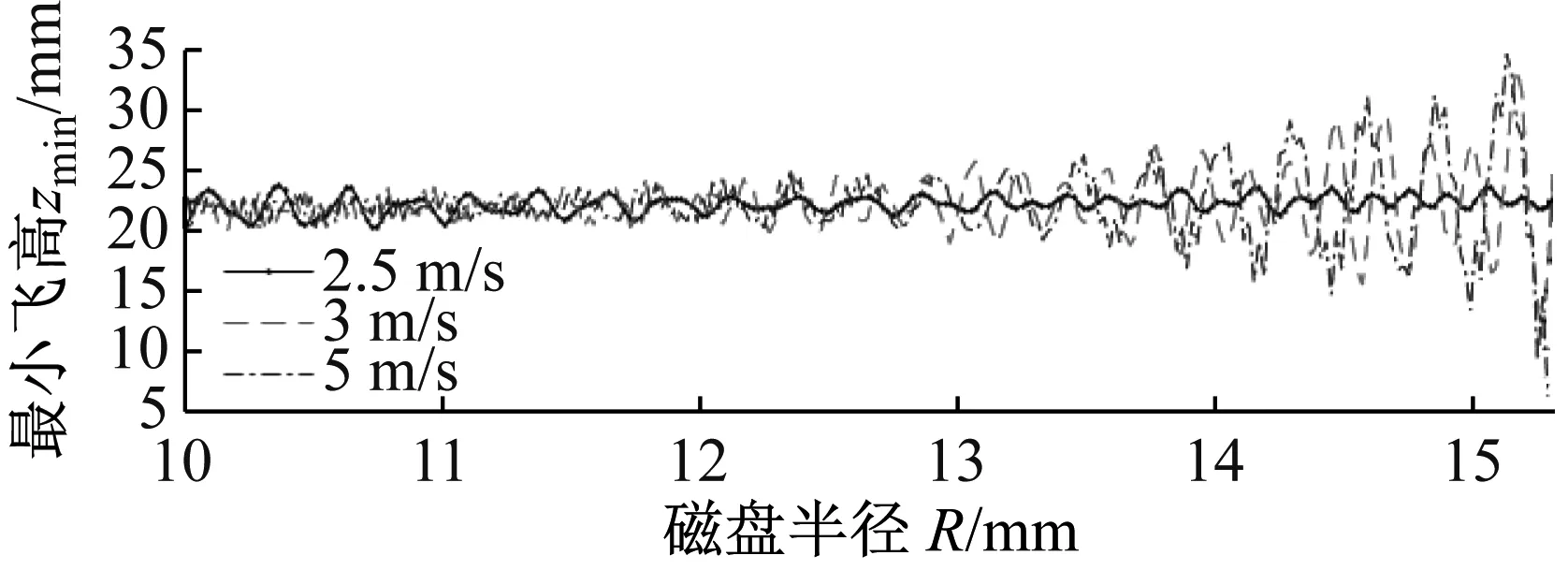
图12 速度不同时滑块最小飞高变化趋势Fig.12 Variation trend of minimum height of slider withdifferent velocity
5 结 论
在磁头/磁盘气膜润滑问题中,滑块所处的磁盘半径位置对滑块的飞行特性影响作用显著,为此本文进行了系统的研究。由头/盘界面气膜润滑方程和动力学方程建立了动态平衡的数学模型来分析磁盘半径位置的影响,并就滑块动态径向飞行过程做了进一步研究,得出:
(1) 磁盘半径越大,滑块所受气膜承载力越大,且初始最小飞高越小、俯仰角越大变化幅度越大;滑块压力中心Xc随半径位置变化情况在不同初始条件下有所区别,因此受滑块初值影响较大;压力中心Yc随磁盘半径的增大在整体上呈减小趋势,且受滑块飞高和俯仰角初值的影响较小。
(2) 随着磁盘半径的不断增大,磁头滑块最小飞高、俯仰角和侧倾角随时间变化曲线的波动幅度明显增大,但增大程度随着半径位置的增大有所减小。
(3) 在滑块动态径向飞行的模拟过程中,磁头滑块的最小飞高、俯仰角和侧倾角在飞行初期波动幅度较大,特别是在1 mm范围内;整体上均随着半径位置的增大而逐渐增大,在滑块径向飞行的后期波动幅度很小,飞行逐渐平稳。
(4) 在磁头滑块动态径向飞行过程中,滑块的径向寻轨速度越大,滑块飞行前期的最小飞高、俯仰角和侧倾角的变化幅度越大;但径向速度越大滑块后期飞行过程中的飞行姿态变化越小,飞行越为平稳;径向寻轨速度不宜过大,否则会导致磁盘损坏。
猜你喜欢
农业装备与车辆工程(2022年2期)2022-10-30
装备制造技术(2021年5期)2021-08-14
热带作物学报(2021年1期)2021-02-22
动力工程学报(2021年1期)2021-01-21
火箭推进(2020年2期)2020-05-06
科技信息·中旬刊(2018年9期)2018-10-21
军事文摘·科学少年(2016年11期)2017-02-09
航空模型(2016年5期)2016-07-25
百科探秘·航空航天(2015年12期)2015-11-07
东南大学学报(自然科学版)(2013年6期)2013-12-26
