可扩展耳蜗鼓阶模型设计
2021-12-05 08:54王佐黎建军吴拥真郭家伟韩飞坡王小甜
中国医疗器械杂志 2021年6期
【作 者】王佐,黎建军,吴拥真,郭家伟,韩飞坡,王小甜
1 马鞍山学院,马鞍山市,243100
2 中国计量大学,杭州市,310018
3 复旦大学附属眼耳鼻喉科医院,上海市,200031
0 引言
人工耳蜗是目前运用最成功的生物医学工程装置,已经作为治疗神经性听力障碍的常规方法。研究表明,人工耳蜗植入可以达到平均80%的句子理解率,而助听器的理解率仅10%[1]。人工耳蜗植入是极其精巧、复杂的手术,医生需要将电极植入至约2周半的蜗状内耳耳蜗中。在人工耳蜗植入手术过程中,医生全凭手感与经验进行植入角度和植入力的调整与控制,而人类力觉感知最小分辨率约为25 mN[2-3],极大地增加了植入手术的操作难度。因此,医生需要通过大量的植入训练来积累经验。
在人工耳蜗植入训练和实验中,通常使用耳蜗或鼓阶模型代替尸体耳蜗标本。早期REBSCHER等[4]通过制作尸体耳蜗标本的模型铸件来开发透明人体鼓阶模型。该模型通过耳蜗标本浇铸而成,可提供准确的尺寸,但是在没有物理模具的情况下无法重复获得。目前,世界三大人工耳蜗电极研发制造公司开发了耳蜗模型用于电极植入实验。澳大利亚Cochlear公司设计了一款平面模型用于电极植入研究[5]。该模型未反映耳蜗真实三维结构,且未体现鼓阶螺旋形状。奥地利MED-EL的三维耳蜗模型具有螺旋形状,但是从模型图像来看,该模型并未真实体现鼓阶通道的几何特征和尺寸,如通道逐渐变细,且文献中并未介绍该模型是否参考耳蜗真实形状、尺寸参数。此外,该模型的植入深度不超过1.25圈[6-8]。美国Advanced Bionics设计了一款1:1比例的耳蜗模型,电极最多可在其通道中植入两圈,但是该模型制造工艺复杂,实物制备困难。为此,提出一种可扩展鼓阶模型设计方法,克服了以上模型设计的局限性。基于已公布的耳蜗解剖学数据,确定鼓阶通道平均尺寸来进行模型设计,且该模型可以借助常用工程软件和常用材料进行任意扩展与复制,以满足研究需求。
1 可扩展耳蜗鼓阶模型设计原理
可扩展耳蜗鼓阶模型设计流程,如图1所示。首先,确定鼓阶模型中心线;然后,基于临床文献资料获取鼓阶通道尺寸,设计鼓阶通道轮廓;最后,沿模型中心线确定鼓阶通道轮廓位置,通过工程设计的方法生成鼓阶模型,该模型可以根据所需比例进行扩展。该鼓阶模型设计方法克服了当前鼓阶模型的局限性,并具有以下特点:
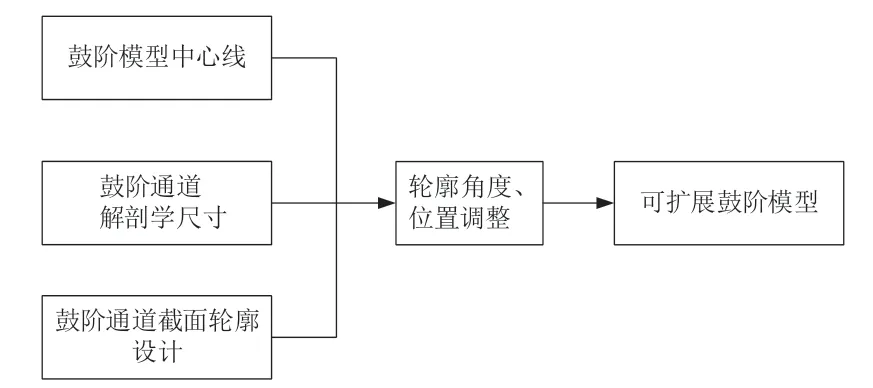
图1 可扩展鼓阶模型设计流程Fig.1 Design flow chart of scalable scala tympani model
(1)可扩展性:该模型能够以任意比例进行扩展,以满足研究需求。
(2)准确性:该模型是基于已公布的耳蜗解剖学数据,确定鼓阶通道平均尺寸来进行模型设计。
(3)重复性:该模型可以借助常用工程软件和常用材料进行复制。
2 可扩展耳蜗鼓阶模型设计
2.1 鼓阶模型中心曲线
参考文献[9]中,Cohen对30名人工耳蜗植入患者和9组颞骨标本的X光片进行分析,得到了鼓阶中电极阵列角度位置,并且使用软件将每个阵列的数据拟合成螺旋曲线。该研究团队发现,植入阵列的平面螺旋形状可以通过数学函数建模。Cohen通过数学方法拟合得到数学模型,并以其作为耳蜗中心线进行耳蜗三维建模,其在极坐标系下的数学表达式为:

式中,R为螺旋中心的径向距离,θ为水平夹角,A、B、C、D、θ0和θf为常数。

式中,z是每个离散螺旋点的高度值,E是常数,θ1是起始角度。
通过参数识别,常数A是尺寸参数,常数B控制最小平均误差,常数D和θ0控制平面耳蜗中心曲线圆窗位置。常数C通过两个公式在θ=100o时进行推算;常数E为高度参数,当θ0和θf固定时,可确定耳蜗平均高度z=2.75 mm。鼓阶模型中心曲线参数值,如表1所示。

表1 鼓阶模型中心曲线参数值Tab.1 Parameter value of central curve of scala tympani model
结合表1中列出的参数值,沿着曲线离散点R的值可通过等式计算,将其导入Matlab中创建1:1比例的鼓阶模型通道中心曲线,如图2所示。其中θ范围为(10.3o,910.3o),增量为0.1o。对于θ的每个值,基于式(1)、(2)和(3)计算曲线上相应点的三维空间坐标(x,y,z)。其中,s为缩放因子,可用于扩展鼓阶模型,例如,s=2将创建2:1比例模型。
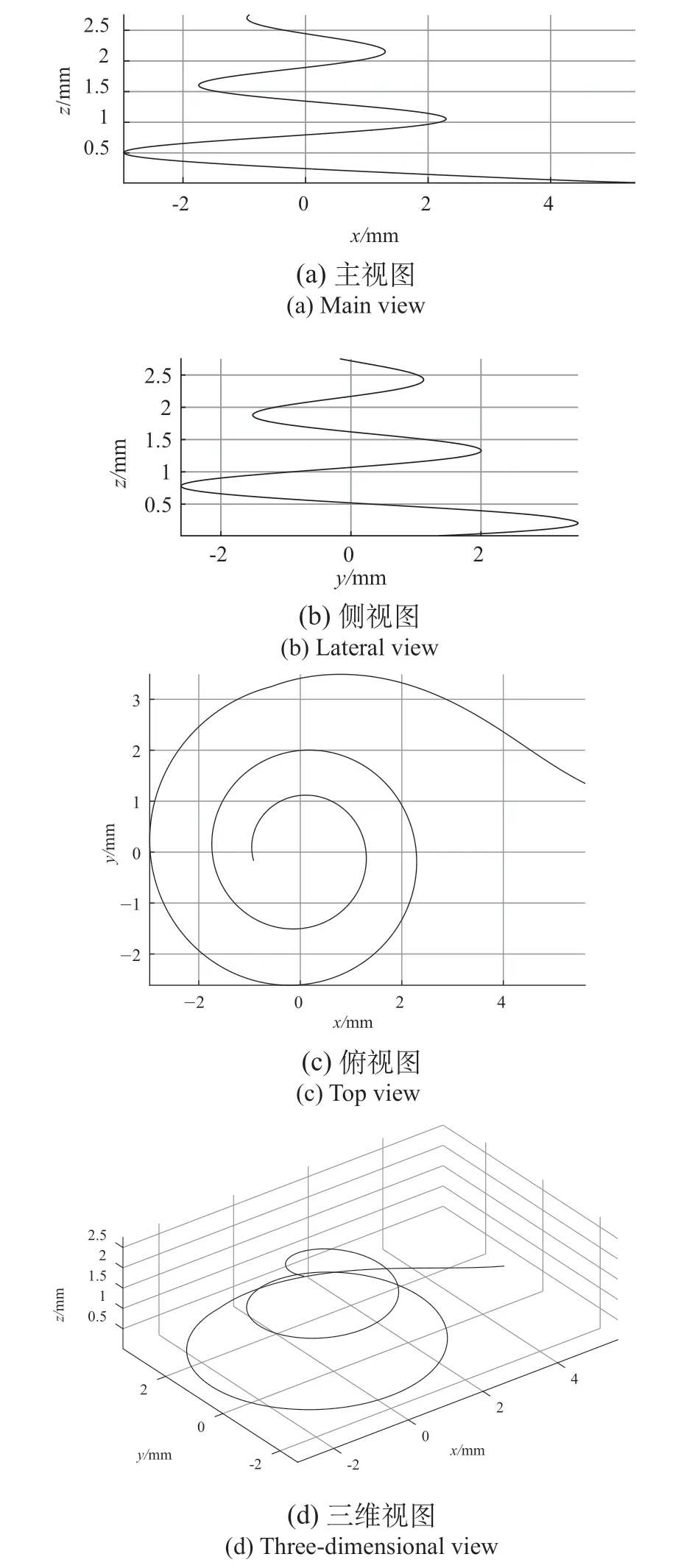
图2 鼓阶模型中心曲线Fig.2 Central curve of scala tympani model

2.2 鼓阶通道轮廓
基于采集到的耳蜗解剖学切片图像,对耳蜗鼓阶结构及其通道轮廓形状进行研究分析,将耳蜗鼓阶通道轮廓形状近似为椭圆。如图3所示,椭圆不仅能够很好地反映鼓阶通道轮廓形状,椭圆的长轴和短轴还可以分别代表鼓阶通道的宽度和高度尺寸参数。模型设计过程中,基于临床解剖学数据确定鼓阶通道宽度和高度尺寸参数[10]。

图3 鼓阶通道轮廓近似图Fig.3 Approximate profile of scala tympani channel
如图4(a)为人体耳蜗解剖学切片图像,在图像中手动确定耳蜗中心轴,使耳蜗截面分布于中心轴的两侧,基于已有的鼓阶尺寸将鼓阶通道轮廓近似为椭圆。依据耳蜗实际螺旋形状,调整鼓阶截面与轴线的角度,使鼓阶通道轮廓与中轴线之间具有一定倾斜角度。在每个鼓阶通道轮廓上设定x-y平面和截面中心轴之间的轮廓倾斜角,以近似在许多耳蜗截面视图中观察到的角度,其中鼓阶通道轮廓宽度方向不垂直于耳蜗中心螺旋轴,如图4(b)所示。
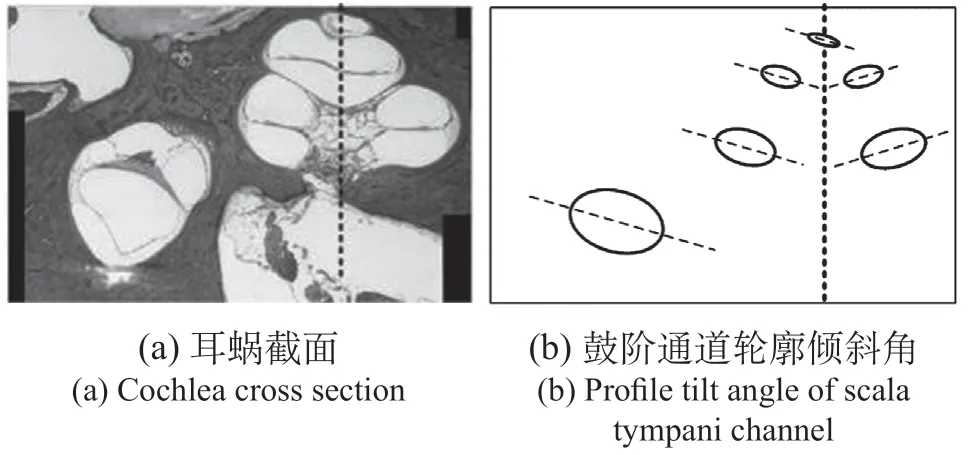
图4 鼓阶通道轮廓及其倾斜角Fig.4 Profile and inclination of scala tympani channel
图5所示为鼓阶通道轮廓示例图,其中,角度φ相对于x-y平面定义。鼓阶模型设计所使用的角度φ来自临床解剖学数据。基于椭圆方程创建鼓阶通道轮廓,轮廓中心为(0,0),轮廓上的每个点由以下方程式计算确定:

图5 鼓阶通道轮廓示例图Fig.5 Profile image of scala tympani channel

式中,w和h分别为给定轮廓的宽度和高度。鼓阶通道轮廓确定后,暂时忽略其径向定位,沿鼓阶通道中心线放置轮廓。基于曲线起始点到每个点的路径段的总长度,确定沿着中心线的离散点,将这些点用作每个截面轮廓的坐标中心。确定穿过每个轮廓的中心线的x-y平面投影的方向,并利用式(5)顺时针旋转π/2来确定每个轮廓相对于模型坐标系x轴的角度α,使每个轮廓垂直于中心线的x-y平面投影,如图6所示。


图6 鼓阶通道轮廓定位图Fig.6 Profile location of scala tympani channel
α是轮廓投影在x-y平面上相对于x轴的角度,arctan2是四象限反正切函数,△y和△x是轮廓中心坐标与中心线上的连续离散点之间的差。
鼓阶通道轮廓设计主要分为两步。首先,根据式(4)及图5绘制轮廓点形成实体轮廓。然后,利用式(5)确定轮廓在三维空间内的位置和方向使得鼓阶中心曲线穿过其中心,通过式(6)计算轮廓上每一点的坐标,将鼓阶通道轮廓从二维平面转换至三维空间。

式中,xpc、ypc、zpc为轮廓上每一点的坐标,Xc、Yc、Zc为轮廓中心点坐标;x和z由式(4)计算确定。
2.3 鼓阶模型生成
将鼓阶模型中心线信息及轮廓信息导入Matlab,设定扩展系数,编写程序生成鼓阶三维模型并输出模型相关参数及数据坐标信息,鼓阶三维数学模型如图7所示。
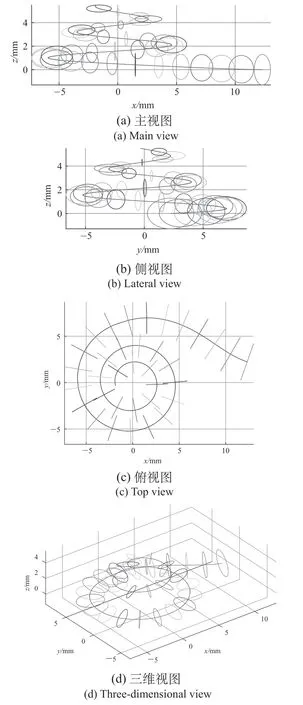
图7 鼓阶三维数学模型Fig.7 Three-dimensional mathematical model of scala tympani
Matlab输出的鼓阶模型中心曲线长度为68.01 mm,模型扩展比例为2:1,由此可得耳蜗鼓阶模型长度为34.005 mm。尽管与参考文献中给出的鼓阶长度存在偏差,但是该模型是由计算机辅助几何方法所得,且参考文献所提供的仅为参考数据。由此可知该鼓阶模型长度基本符合真实耳蜗几何特征。
将每个鼓阶通道轮廓坐标及鼓阶中心线坐标以样条曲线方式导入SolidWorks中,然后由鼓阶截面轮廓沿鼓阶中心线边界切除创建鼓阶通道,2:1比例的虚拟鼓阶模型如图8所示。鼓阶模型上平面有一大小为M1的圆柱孔与蜗顶相通,在植入实验前,可以由此注入润滑液以模拟鼓阶内部液体环境。

图8 虚拟鼓阶模型Fig.8 Virtual model of scala tympani
3 鼓阶模型制备与实验
3.1 鼓阶模型制备
将在SolidWorks中创建完成的鼓阶模型存储为.stl格式文件并输出至3D打印机进行打印。采用Formlabs公司的Form2 SLA 3D打印机和全透明型光敏树脂对耳蜗鼓阶模型进行制备,全透明型光敏树脂便于在电极植入过程中实时观察电极位置并记录植入过程。
预弯电极植入实验采用2:1比例的耳蜗鼓阶模型,如图9所示为2:1比例的耳蜗鼓阶模型三视图,模型中长方体的尺寸为19.97 mm×19.67 mm×9.33 mm。
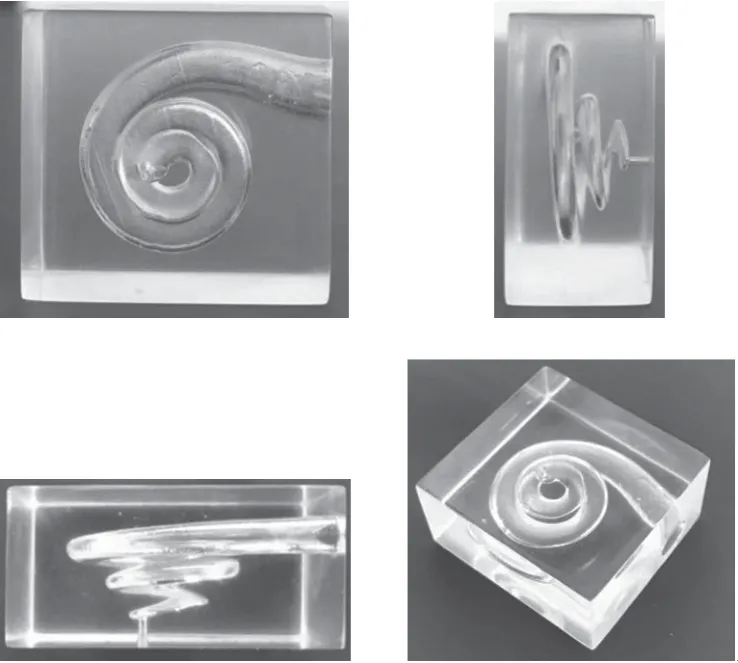
图9 2:1比例鼓阶模型三视图Fig.9 Three views of 2:1 scala tympani model
3.2 预弯电极植入实验
基于制备所得耳蜗鼓阶模型,设计人工耳蜗预弯电极机器人植入力检测系统。实验平台由5部分组成,分别为计算机、机器人系统、夹持器、视觉系统和预弯电极植入力检测平台。机器人系统用于夹持电极与电极植入,视觉系统主要用来记录预弯电极植入过程。预弯电极植入力检测平台测量电极植入过程中垂直方向的植入力,传感器将采集到的信息发送至PC机进行存储分析。
基于制备的2:1比例鼓阶模型和人工耳蜗预弯电极植入力检测实验平台,进行机器人和手动植入力检测实验,如图10所示为预弯电极植入过程中的6个时刻。

图10 电极植入过程Fig.10 Implantation process of the electrode
共进行8组预弯电极植入力检测实验,预弯电极植入力检测结果如图11所示。结果表明,使用该模型进行植入实验,机器人植入力最大值远小于手动植入力。由此可知,通过机器人进行人工耳蜗植入手术可以明显降低电极植入力,对于减少对患者残余听力损伤具有重要意义。此外,结合图11中的植入力变化曲线可知,机器人在植入电极的过程中植入力变化曲线波动幅度较小,而手动植入过程中可能会出现植入力波动较大的情况,机器人植入相较于手动植入具有更高的稳定性与可靠性。
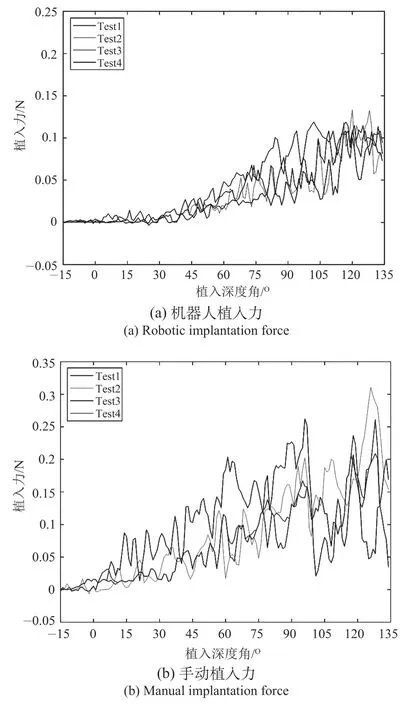
图11 植入力检测结果图Fig.11 The result of the implantation force testing
4 结论
可扩展耳蜗鼓阶模型设计方法是基于耳蜗临床解剖学数据和耳蜗数学模型提出的,能够较为准确地反应耳蜗真实结构,具有一定的准确性。该鼓阶模型能够以不同比例进行扩展,以满足不同研究和实验需求,该方法不会破坏耳蜗结构,且可以通过常用工程软件和常用材料进行复制,模型易于制备、成本较低,并且能够重复用于电极植入实验,具有一定的经济价值。
猜你喜欢
水电站机电技术(2022年4期)2022-04-18
中国听力语言康复科学杂志(2021年6期)2021-12-21
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
中国交通信息化(2017年4期)2017-06-06
海南医学(2016年8期)2016-06-08
中外医疗(2015年5期)2016-01-04
听力学及言语疾病杂志(2015年5期)2015-12-24
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
华东理工大学学报(自然科学版)(2015年5期)2015-02-27