
考虑电力电子变换器的电力系统动态负荷建模
2021-12-14 07:40刘述喜杨淞淇
重庆理工大学学报(自然科学) 2021年11期
刘述喜,杨淞淇
(1.重庆市能源互联网工程技术研究中心, 重庆 400054;2.重庆理工大学 电气与电子工程学院, 重庆 400054)
近年来,随着经济的发展,用电负荷不断增加,远距离输电线路的输送容量不断增大,但电网建设并没有得到同步发展,负荷侧对外来电力的依赖程度不断提高,使电力系统的安全稳定问题更加突出[1-3]。电力系统的快速发展使新能源发电成为趋势。例如,光伏发电[4-6]输出的电能接入大电网时,不可避免地大量使用到电力电子变换器,导致目前的电力系统呈现出“电力电子化”的趋势[7-8],表现出与传统电力系统不同的多时间尺度动力学特性。因此,原有的动态负荷模型已不能良好地反映某区域的负荷外部特性,需要将电力电子装置及控制部分对负荷外部特性的影响考虑在内,对电力系统仿真分析和稳定性分析等提供更可靠的理论与实际研究基础。
针对电力负荷建模,目前的研究方法可分为统计综合法和总体辨识法。统计综合法需要对负荷进行统计,主要包括各类负荷,如民用、工业、商业的比重,即负荷类型数据[9-11];各种电气设备如电阻性负载、电动机所占比例;负荷元件的平均特性[12-13],最后综合得出负荷模型。美国电力研究所研发的LOADSYN软件包采用的就是这种方法[14]。目前的研究中更多采用总体辨识法,它简单来说分为2个步骤:首先确定负荷模型,再应用辨识理论确定模型参数。确定模型的方法有2种,分别是机理模型法和非机理模型法。靳伟佳[15]采用非机理模型法将建模对象看做一个“黑箱”,忽略内部的拓扑,仅根据输入输出数据抽象出数学模型。由于该模型不具有任何物理含义,导致模型完全依赖输入输出数据,若数据不够准确,会使得模型可靠性降低。机理模型法又可细分为多种,传统方法采用一定比例的感应电机作为动态负荷,并联一定比例的静态负荷。屈星等[16-17]针对光伏发电对系统负荷的影响,提出一种关于配电网的广义综合负荷,将逆变器考虑在动态负荷中,但没有包含逆变器的控制部分。
本文研究在传统的感应电机基础上加入整流逆变装置及控制系统作为负荷动态模型。首先确定系统的拓扑结构;然后经过一系列的等式变换消除中间变量,得出整体系统的动态数学模型;最后通过电压和频率跌落,验证建立的动态数学模型能否准确反映系统的外部特性。
1 考虑变换器的动态负荷基本分析
1.1 建模思路
应用机理模型法,在原有感应电机动态模型基础上加入整流逆变装置以及控制系统,对图1中虚线框所示的电力系统负荷组成进行建模分析。
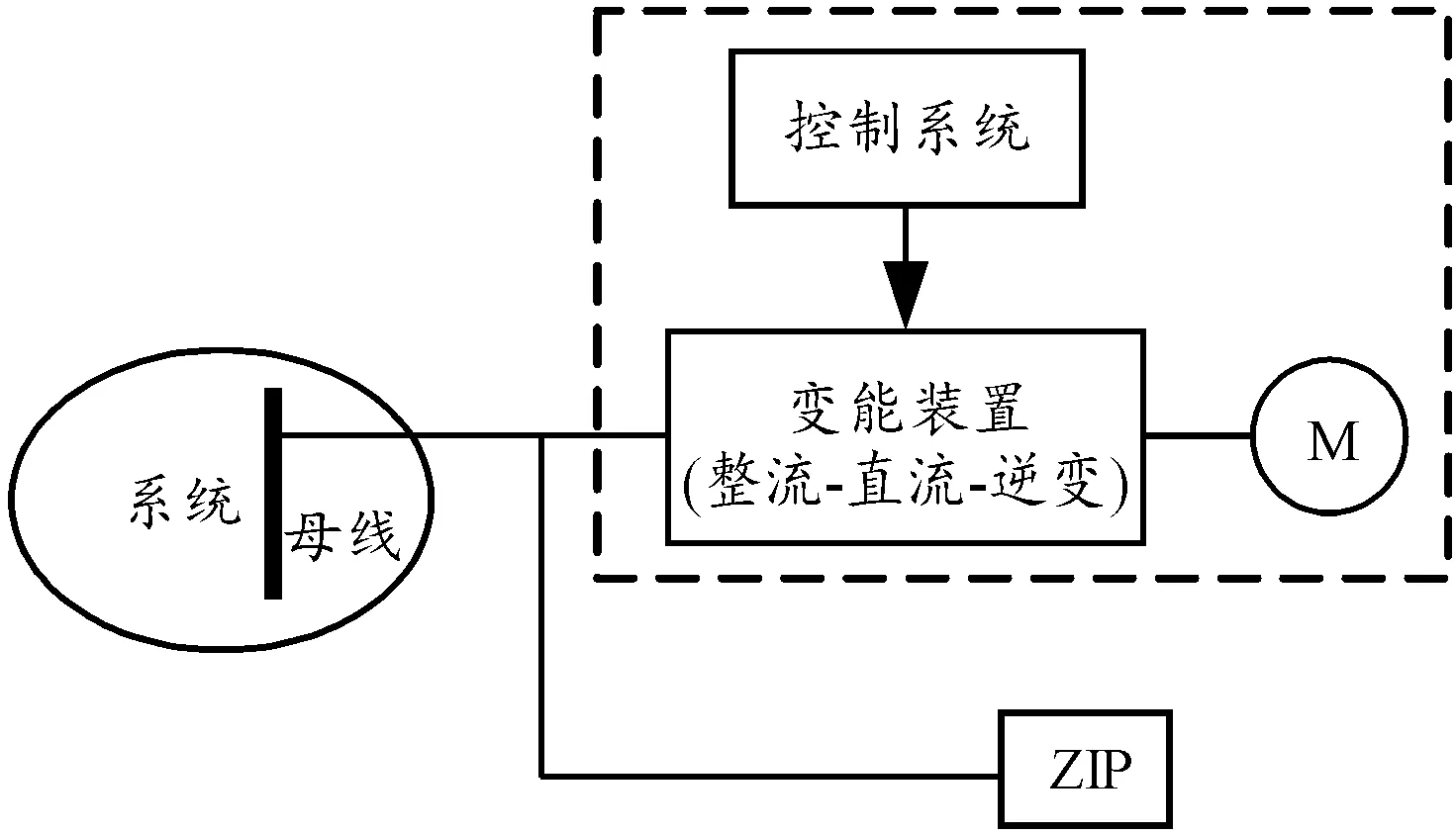
图1 电力系统负荷组成框图
加入电力电子变换器后的动态负荷的拓扑如图2所示。系统主电路由三相不可控整流器、直流支路、三相逆变器和感应电机组成。整流装置与逆变装置通过直流电容Cdc联系在一起,实现两侧的能量转换。由于逆变器和感应电机之间参数的关系过于复杂,为简化计算,认为逆变器输出电压直接作用于感应电机的定子。图2中:ea、eb、ec表示网侧三相电源;iag、ibg、icg表示网侧三相电流;R表示线路电阻;L表示线路电感;vd表示二极管整流后直流电压;Rdc表示直流支路电阻;Ldc表示直流支路电感;Cdc表示直流支路电容;id表示二极管整流的电流;ic表示电容电流;il表示逆变器的输入电流;ias、ibs、ics表示感应电机定子电流。

图2 考虑电力电子变换器的动态负荷拓扑图
整体建模思路是将电路由直流支路分为2个部分:① 电网电源和不可控整流;② 逆变装置和感应电机。因为电力系统的主要波动来自于电压和频率,故研究重点是消除中间变量建立有功功率和无功功率与电压、频率的动态关系。通过分析具体模型,抽象出输入与输出的传递函数关系式,使模型在具有较高可靠性的同时具有一定的适用性。
具体步骤:① 建立网侧和整流部分的动态数学模型;② 忽略逆变器的损耗,根据逆变器输入功率与输出功率相等,将逆变器的输出功率由电机参数表示,结合直流支路的KCL方程,将中间变量转化为仅与电压、频率相关的式子;③ 将中间变量表达式再次代入步骤(1)中的数学模型,得到最终的系统动态模型。
1.2 逆变器控制原理
逆变器采用典型的V/F控制,即恒压频比控制。V/F控制保持输出电压和输出频率为恒定值,从而保持磁通恒定。控制原理框图如图3所示,整个控制系统由转速控制器和矢量控制器构成。

图3 逆变器的V/F控制原理框图
在电机调速时,需要使磁通量Φm保持为额定值。若磁通太弱,电机的铁芯无法得到充分利用;若磁通太强,电机的铁芯将会饱和,导致励磁电流过大,严重时甚至因为绕组过热而损坏电机[18-20]。该方法在工业和民用感应电动机驱动调速应用中得到了广泛认可,在负荷侧的典型应用领域是泵、通风系统等。很多先进控制理论都在该方法基础上演变而来,因此,该控制方法在电力系统负荷侧建模中具有很强的代表性。
2 动态负荷建模
2.1 网侧电源和整流部分建模
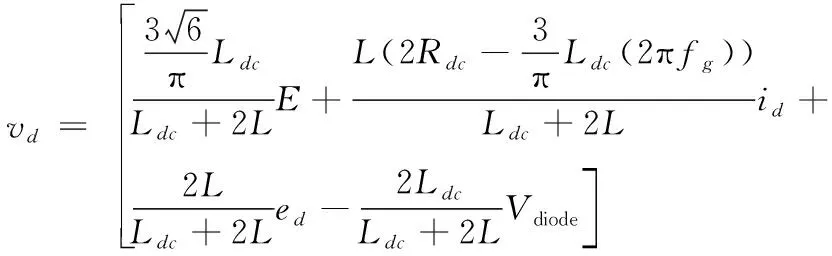
根据图2,二极管整流后直流电压为:
(1)
式中:E为相电压有效值;Vdiode为二极管导通压降;fg为网侧频率。
直流支路电压电流关系为:
id=ic+il
(2)
(3)
(4)
联立式(1)(4)得:
(5)
采用小扰动分析法[21-22]将式(5)线性化。其余线性化均采用此方法。线性化式(5)得:
(6)
将式(6)代入式(1)得
(7)
电源处有功功率和无功功率在dq0坐标下表示为:
(8)
(9)
式中:vdg、idg分别为电源处电压、电流d轴分量;vqg、iqg分别为电源处电压、电流q轴分量。将P和Q在稳态值处进行泰勒级数展开,并将dq分解的网侧电压电流线性化后代入式(8)(9)得:
P=(P0+GP21ΔE+GP22Δid+GP23Δfg+
GP24ΔidΔE+GP25ΔE2+GP26ΔEΔfg)
(10)
Q=(Q0+GQ21ΔE+GQ22Δid+GQ23Δfg+
GQ24ΔidΔE+GQ25ΔE2+GQ26ΔEΔfg)
(11)
GP21~GP26,GQ21~GQ26是与网侧参数相关的传递函数。由式(10)(11)可以看出,有功功率和无功功率是与ΔE、Δfg、Δid有关的动态方程,其中ΔE和Δfg是电源侧变量,Δid为直流支路电流变量,因此Δid是中间变量,在后续讨论中需将其消除。不难看出,负荷建模中有许多参数要进行辨识,这将在另一个专题中进行研究。
2.2 感应电机数学模型
采用3阶感应电机模型,其相比于1阶模型考虑了电磁暂态过程,与电磁功率的变化紧密相联,能较准确地反映负荷功率的变化。dq0坐标系下的3阶感应电机数学模型如式(12)~(25)所示。
(12)
(13)
(14)
(15)
Ψds=Lsids+Lmidr
(16)
Ψqs=Lsiqs+Lmiqr
(17)
Ψdr=Lmids+Lridr
(18)
Ψqr=Lmiqs+Lriqr
(19)
Te=1.5p(Ψdsiqs-Ψqsids)
(20)
(21)
(22)
(23)
vdr=0
(24)
vqr=0
(25)
式中:Rs为定子电阻;Ls为定子电感;vqs、iqs分别为q轴定子电压和电流;vds、ids为d轴定子电压和电流;vqr、iqr为q轴转子电压和电流;vdr、idr为d轴转子电压和电流;Lm为磁化电感;Rr为转子电阻;Lr为转子电感;ψqs、ψds为定子q和d轴磁通量,ψqr、ψdr为转子q和d轴磁通量;ωr为转子电角速度;ωs为定子电角速度;p为极对数;Te为电磁转矩;TL为机械转矩;H为惯性常数。
2.3 V/F控制的逆变器数学模型
采用的逆变器控制包括转速控制和空间矢量调节,V/F控制的数学逻辑图如图4所示。
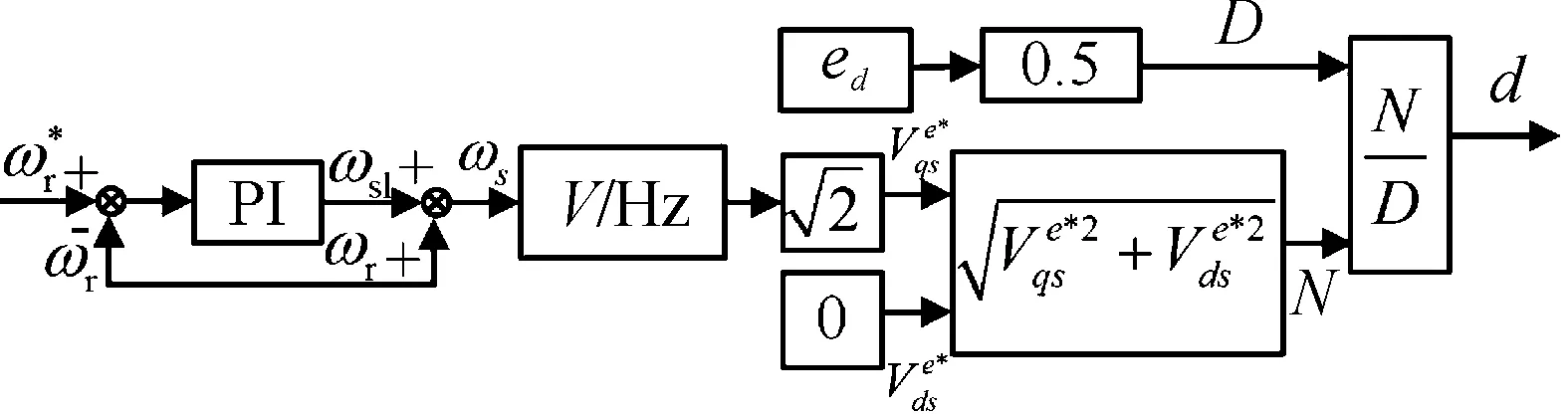
图4 V/F控制的数学逻辑示意图
占空比调制相关的电压方程为:
(26)
其中θce=θc-θe,θce表示变换器参考系与同步参考系的相位差。
(27)
由式(27)推出:
(28)
闭环V/F控制方程见式(29)~(31)。
(29)
ωSL+ωr=ωs
(30)
(31)
式中:带“*”号上标为平均值;d为占空比;kp为速度PI控制器的比例增益;ki为速度PI控制器的积分增益。
2.4 直流支路的中间变量数学模型
感应电机的输入有功功率为:
(32)
逆变器的输入功率为:
PIN=edil
(33)
由文献[22]可知,逆变器的损耗主要集中在6个开关器件上。为简化计算,忽略逆变器损耗,可得:
PIN=PIM
(34)
对式(12)~(21)、(28)~(32)进行线性化,推导得出直流支路的电流电压表达式为:
Δid=N11ΔE+N12Δed+N13Δfg
(35)
Δed=G11ΔE+G12Δfg
(36)
式中,N11~N13、G11和G12是关于系统参数的传递函数表达式。
2.5 全系统数学模型
将式(35)和(36)代入式(10)和(11),得出全系统的动态方程式为:
P=[P0+GP1ΔE+GP2ΔE2+
(GP3+GP4ΔE)Δfg]
(37)
Q=[Q0+GQ1ΔE+GQ2ΔE2+
(GQ3+GQ4ΔE)Δfg]
(38)
ΔE=E-E0
(39)
Δfg=fg-fg0
(40)
式中:E0、fg0、P0和Q0为系统某一工况下的稳态值。式(38)和(39)的输入是系统的电压、频率变化量,输出为系统有功功率和无功功率,是一个7阶传递函数方程,其中感应电机占用3阶,变能装置及其控制部分占用4阶。
3 仿真验证
对所建立的数学模型进行动态性能验证,在Matlab/Simulink平台中搭建图1的物理模型仿真,在1.2~1.4 s电源处设置三相故障,使电压分别跌落10%和20%,总仿真时间为2 s,用于模拟现实生活中的随机故障事件。将物理模型仿真的电压和频率跌落作为动态数学模型的输入,随后将2组波形图进行比较,验证该数学模型的正确性。
仿真基本参数设置为:感应电机参数:Rs=0.435 Ω,Lm=69.31 mH,p=2,TL=11 N·m,nr=1 700 r/min;直流支路参数:Vdiode=1.3 V,Cdc=3 400 μF,Rdc=0 Ω,Ldc=10 mH;逆变器控制参数:kp=9,ki=10。图5~8分别是电压跌落10%时,电压、频率、有功功率和无功功率曲线。图9~12分别是电压跌落20%时,电压、频率、有功功率和无功功率曲线。

图5 10%电压跌落时A相电压有效值

图6 10%电压跌落时频率变化曲线
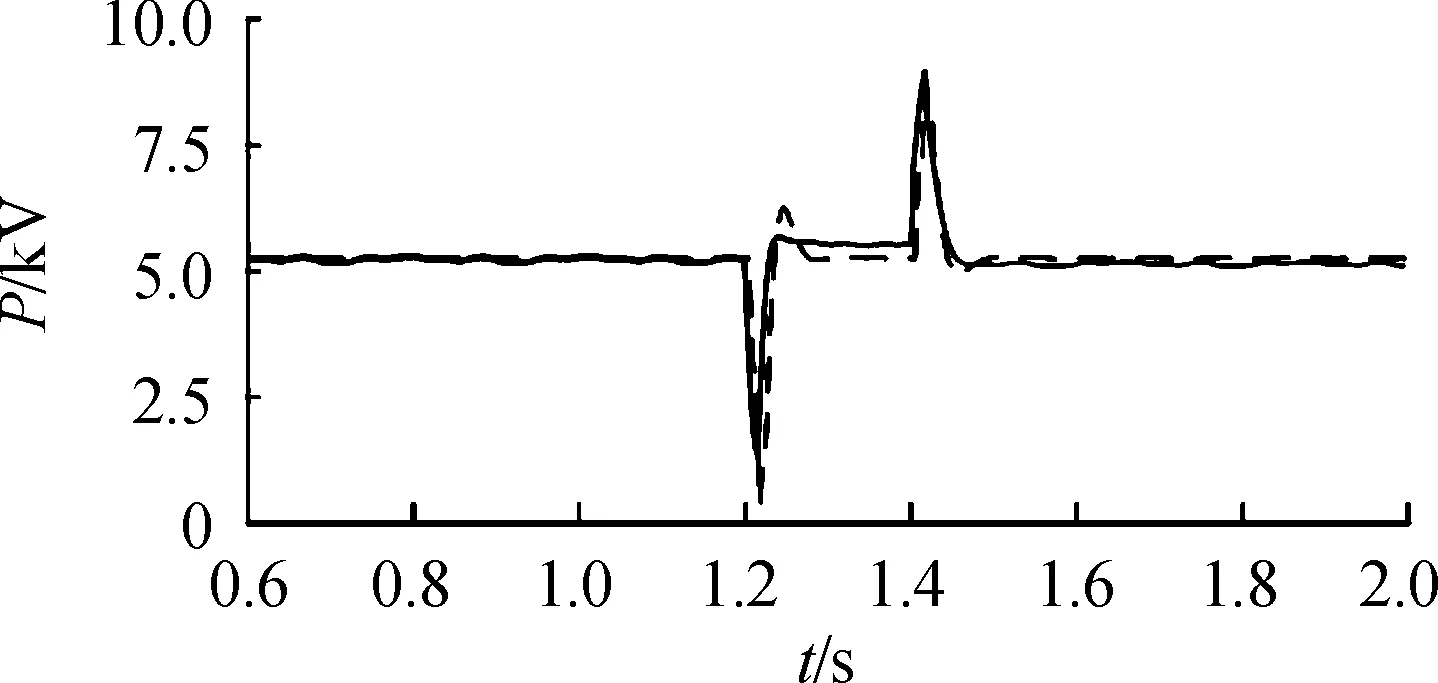
图7 10%电压跌落时有功功率变化曲线

图8 10%电压跌落时无功功率变化曲线

图9 20%电压跌落时A相电压有效值

图10 20%电压跌落时频率变化曲线

图11 20%电压跌落时有功功率变化曲线

图12 20%电压跌落时无功功率变化曲线
图5是A相电压的有效值,在电网三相故障时,A相电压跌落了10%。电压的跌落也引起了频率±0.2 Hz的波动,频率变化如图6所示。系统的有功功率和无功功率分别如图7、8所示,其中虚线代表数学模型,实线代表物理模型,不难看出两者重合率较高。
图9中,A相电压在1.2~1.4 s跌落了20%,频率随之出现了±0.2 Hz左右的变化,如图10所示。图11、12所示的有功功率和无功功率在电压开始跌落时发生了突变,骤减至接近于0;随后由于控制作用恢复到稳态值附近;在1.4 s电压升高到稳态值时,有功功率和无功功率又有一个明显的骤升,经过暂态过程,最终恢复至稳态值。
不难看出,无论是电压跌落10%还是20%,2种模型的有功功率和无功功率都有很好的一致性,验证了所建立数学模型的正确性。该方法相比于“黑箱”法,具有更高的可靠性,是基于明确物理意义的方程式推导出的输入输出表达式。该表达式也易于后续的参数辨识、控制设计、稳定性分析等。
4 结论
对经典的3阶感应电机动态模型进行了改进,在感应电机前添加了变能装置来泛化表示系统的能量变换带来的影响。具体动态模型由3个部分组成:三相不可控二极管整流、V/F控制的三相电压型逆变器和感应电机。使用dq坐标系下方程,采用小扰动分析法将非线性方程线性化,并通过拉普拉斯变换,建立传递函数形式的动态模型。通过在Matlab/Simulink中建立物理模型,分别在电压跌落约10%和20%的情况下对所建立的数学模型进行验证。对比输出波形可知,曲线的拟合效果较好,验证了动态数学模型的正确性。后续将根据实际的电力系统数据进一步对模型进行验证。由于该模型参数较多,有必要分析各参数的灵敏性,对灵敏性较低的参数采用固定值,仅对高灵敏度参数进行参数辨识,进一步简化模型,加快仿真运算速度。
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年1期)2021-03-09
电机与控制学报(2018年9期)2018-05-14
科技与创新(2017年7期)2017-05-13
发明与创新·中学生(2017年4期)2017-03-31
中学数学杂志(初中版)(2016年5期)2016-11-01
中学数学杂志(初中版)(2016年5期)2016-11-01
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
