
泵阀双源协同驱动非对称液压缸系统特性
2021-12-16 06:14梁涛,葛磊,权龙
液压与气动 2021年12期
梁 涛, 葛 磊,权 龙
(太原理工大学 新型传感器与智能控制教育部与山西省重点试验室,山西 太原 030024)
引言
阀控液压系统具有操控性好、动态响应快、功率密度大等优点,是工程机械应用最为广泛的液压系统。典型系统有负载敏感系统[1]、负流量控制系统等[2]、正流量控制系统[3-4],不足之处是节流损失严重,不仅降低了系统能效,而且引起大量发热。随着全球能源危机和环境污染等问题日益凸显,对工程机械能效提出了更高要求。为此,杨华勇等[5]对传统负载敏感系统进行改进,设计了电液流量匹配控制系统,使泵口压力自动和最高负载压力相匹配,减小了系统压力裕度。程敏等[6]针对电液负载敏感系统响应性差等问题,提出一种基于流量前馈与压力反馈复合控制的方法,减小了过流匹配造成的能量损失。权龙等[7-8]将进出口独立控制技术应用于液压挖掘机,采用2个比例方向阀单独控制液压执行器两腔流量和压力,有效降低了系统节流损失。刘凯磊等[9]对由5个比例阀构成的进出口控制液压挖掘机展开研究,节能效率提高14.47%。上述方案均采用液压阀控制执行器运行,不可避免地存在节流损失,节能效果有限,尤其对于多执行器控制系统,执行器载荷差异会造成更大的节流损失。
泵控液压系统采用液压泵直接控制执行器运行,可以从根本上消除节流损失,较阀控系统节能达40%[10],已经在航空航天等领域得到广泛应用[11]。目前,许多学者对泵控技术在工程机械的应用展开了研究。ZIMMERMAN J等[12]设计了采用2个液控单向阀和蓄能器组合平衡非对称液压缸不对称流量的方案,并开发全泵控小型液压挖掘机,与负载敏感系统相比,降低整机燃油消耗达40%。葛磊等[13-14]提出一种三配油窗口非对称轴向柱塞泵原理,并用于控制挖掘机动臂和斗杆,取得了良好了节能效果。马艳斌等[15]采用定量和变量泵结合控制单出杆液压缸运行,并与单泵和非对称泵控单出杆液压缸系统进行了对比分析。MINAV T等[16]采用伺服电机同轴驱动双泵分别控制非对称液压缸两腔,并在液压缸有杆腔增设低压蓄能器,补偿系统泄漏和泵排量误差。张树忠等[17]采用伺服电机驱动单泵控制非对称液压缸,并构成液压挖掘机整机方案。然而现有泵控系统的研究主要针对单个执行器,即使用于多执行器系统也是单执行器回路的简单叠加,严重增加了系统的总装机功率和成本。
为了兼具阀控系统高功率密度、低装机功率和泵控系统高能效的优点,本研究提出一种泵阀双源协同驱动非对称液压缸系统,构建多学科联合仿真模型,并设计系统控制策略,仿真分析系统的运行特性和能耗特性。
1 系统原理
如图1所示为所提出泵阀双源协同驱动非对称液压缸系统原理图。该系统包括电动机、电控变量泵、溢流阀、阀控单元、泵控单元、非对称液压缸和超级电容等,其中泵控单元由伺服电机驱动定量泵组成。采用泵控单元控制液压缸的运行方向和速度大小,阀控单元控制电控变量泵的输出流量,用于补偿液压缸面积差引起的不对称流量。当系统处于能量回收阶段,采用泵控单元将执行器动势能转化为电能,经双向DC/DC变换器储存到超级电容中,并在泵控单元驱动执行器运行时,通过DC/DC控制超级电容释放存储的电能。此外,当驱动多个执行器同时运行时,通过泵控单元调控轻载执行器非驱动腔压力,使各个执行器驱动腔压力相等,并同时使主控阀压差等于压力补偿器设定压差,压力补偿器全开,从而消除载荷差异引起的压力补偿器节流损失;并且通过阀控单元提升每个泵控单元的驱动功率,由于只设置单一大功率电控变量泵作为各阀控单元动力源,因此相比现有泵控多执行器系统,显著降低了系统总装机功率。

1.电动机 2.电控变量泵 3.溢流阀 4.单向阀 5.阀控单元6.泵控单元 7.非对称液压缸 8.开关阀 9.逆变器10.PWM整流器 11.双向DC/DC变换器 12.超级电容图1 泵阀双源协同驱动非对称液压缸系统原理图Fig.1 Schematic diagram of valve control and pump control dual source cooperative drive differential cylinder system
2 仿真模型
在研究多执行器驱动系统之前,首先对泵阀双源协同驱动单执行器系统工作特性展开研究分析。以某大型液压挖掘机斗杆为研究对象,采用图1所示原理建立泵阀双源协同驱动斗杆系统。
为了构建能够真实反映液压挖掘机斗杆运行特性的仿真模型,依据液压挖掘机实际测绘尺寸和表1所示液压系统关键参数,在多学科联合仿真软件SimulationX环境中,构建泵阀双源协同驱动斗杆系统联合仿真模型,如图2所示。该模型能够实时计算各执行机构质心和转动惯量变化,并通过机械结构模型和液压系统模型无缝连接,进而真实反映系统运行过程中施加在斗杆液压缸上的等效质量和外负载力。

1.机械部分 2.液压部分 3.电气部分 4.控制部分图2 泵阀双源协同驱动斗杆系统联合仿真模型Fig.2 Co-simulation model of valve control and pump control dual source cooperative drive arm system

表1 系统主要参数Tab.1 Main parameters of the system
在上述联合仿真模型的基础上,保持系统关键参数不变,进一步构建电液流量匹配控制斗杆系统联合仿真模型,来对比分析本研究所提系统和电液流量匹配控制系统的运行特性和能耗特性。
根据液压挖掘机实际使用系统进一步构建负流量控制系统液压挖掘机模型,来验证所构建液压挖掘机联合仿真模型的准确性。如图3所示,为斗杆内收-外摆运行一个周期,斗杆液压缸位移和两腔压力的仿真试验结果。可以看出在液压缸位移曲线基本吻合的前提下,液压缸两腔压力的仿真和试验结果趋势基本一致,证明了仿真模型的准确性,可以用于后续仿真。

图3 斗杆系统仿真试验对比Fig.3 Comparison of simulation and test results of arm system
3 控制策略
对于泵阀双源协同驱动非对称液压缸系统,可将其等效成由面积为A2的对称缸和面积为A1-A2的单作用缸组成,因此采用泵控单元控制斗杆液压缸运行方向和速度大小,阀控单元补偿面积差引起的不对称流量,如图4所示为斗杆驱动系统控制策略。

图4 控制策略Fig.4 Control strategy
3.1 液压缸伸出策略
电控手柄发出指令信号ui>0,控制斗杆液压缸伸出,泵控单元和阀控单元输出流量进入液压缸无杆腔,开关阀8关闭,有杆腔流量进入泵控单元。根据阀控单元主控制阀阀口过流面积曲线,则泵控单元设定流量Q1d为:
Q1d=Kqf(ui)
(1)
式中,Kq—— 流量增益
f(ui) —— 阀控单元主控制阀阀口过流面积曲线函数
泵控单元定量泵排量为V1,则伺服电机转速n1d为:
n1d=Q1d/V1
(2)
根据泵控单元输出流量和液压缸两腔面积比,可以确定液压缸伸出时所需补偿的不对称流量。然而由于2个液压泵在工作过程中均存在泄漏,并且泄漏受转速、压力等因素的影响,导致阀控单元和泵控单元输出流量匹配性变差,液压缸两腔出现压力飞升或者吸空现象。为了避免此类现象发生,提高控制精度,引入泄漏补偿系数β对电控变量泵输出流量进行补偿,根据式(3)~式(5)确定电控变量泵设定流量和排量,最终由泵控单元和阀控单元共同驱动斗杆液压缸伸出。
α=A1/A2
(3)
Q2d=Q1d(α-1)+p1β
(4)
V2d=Q2d/n0
(5)
式中,α—— 液压缸两腔面积比
A1—— 液压缸无杆腔面积
A2—— 液压缸有杆腔面积
Q2d—— 电控变量泵设定流量
p1—— 液压缸无杆腔压力
V2d—— 电控变量泵设定排量
n0—— 电控变量泵转速
3.2 液压缸缩回策略
电控手柄发出指令信号ui<0,控制斗杆液压缸缩回,泵控单元输出流量进入液压缸有杆腔,开关阀8打开,无杆腔流量一部分进入泵控单元,一部分通过阀控单元返回油箱。由式(1)和式(2)可计算得到泵控单元设定输出流量和伺服电机转速,此时液压泵不输出流量。
4 仿真分析
在斗杆空载工况下,控制斗杆以图5所示内收-外摆一个工作周期,来对比分析阀双源协同驱动非对称缸系统与电液流量匹配控制系统的运行特性和能耗特性。

图5 斗杆工作循环Fig.5 Working cycle of arm
4.1 运行特性分析
对于电液流量匹配控制系统,采用流量前馈[18]方式计算电控变量泵排量。设定斗杆液压缸运行速度460 mm/s,位移1514 mm,仿真得到如图6所示的电液流量匹配控制斗杆系统运行特性。可以看出在斗杆液压缸伸出初始阶段,速度出现波动,无杆腔伴随出现吸空现象,需要通过补油阀进行补油;随后两腔压力不断升高。同时在斗杆液压缸缩回制动阶段,速度和两腔压力存在较大波动。

图6 电液流量匹配控制斗杆运行特性Fig.6 Operation characteristics of electro hydraulic flow matching control arm
斗杆运行一个周期,图6b液压缸输出力经历多次正负变换,可知斗杆液压缸共经历:①超越伸出、②阻抗伸出、③超越缩回和④阻抗缩回4种工况,其中液压缸输出力Fhyd如式(6)所示:
Fhyd=p1A1-p2A2
(6)
式中,p2为液压缸有杆腔压力。
保持斗杆液压缸相同设定速度和位移,采用图4所示控制策略,仿真得到如图7所示泵阀双源协同驱动斗杆系统运行特性。可以看出斗杆液压缸在伸出和缩回阶段均保持运行平稳,起动和停止过程中均没有出现明显波动和超调。

图7 泵阀双源协同驱动斗杆运行特性Fig.7 Operation characteristics of valve control and pump control dual source cooperative drive arm
在①阶段1~3.8 s,斗杆液压缸输出力为负值,液压缸在斗杆等执行机构重力扭矩作用下超越伸出,随着重力扭矩逐渐减小,有杆腔压力随之逐渐减小,无杆腔压力保持较小值1.1 MPa,防止吸空;
在②阶段3.8~5.5 s,斗杆液压缸输出力为正值,液压缸在泵控单元和阀控单元共同驱动下阻抗伸出,在减速阶段输出力为负,加快减速过程;
在③阶段7~7.9 s,斗杆液压缸输出力从正值快速变为负值,这主要是因为摩擦力的存在,斗杆液压缸超越缩回外负载力较小,为快速提升液压缸缩回速度,采用泵控单元驱动液压缸缩回,因此有杆腔压力增大;
在④阶段7.9~11.5 s,斗杆液压缸输出力为负值,泵控单元驱动液压缸阻抗缩回,无杆腔压力保持较小值防止吸空,有杆腔压力随着重力扭矩增大而逐渐增大。
4.2 能耗特性分析
电液流量匹配控制斗杆系统功率和能量曲线如图8所示。在斗杆液压缸伸出阶段,液压泵输出功率Ph较大,最大值为65.6 kW;同时采用液压阀控制液压缸运行,因此在液压阀上产生较大的节流损失功率Ploss,平均约为46 kW。斗杆液压缸缩回阶段,液压泵输出功率随着斗杆的外摆不断增大,最大为47.5 kW。对液压泵输出功率和节流损失功率进行积分可以得到,斗杆运行一个周期,液压系统输出能量Eh为236 kJ,节流损失Eloss为172 kJ。
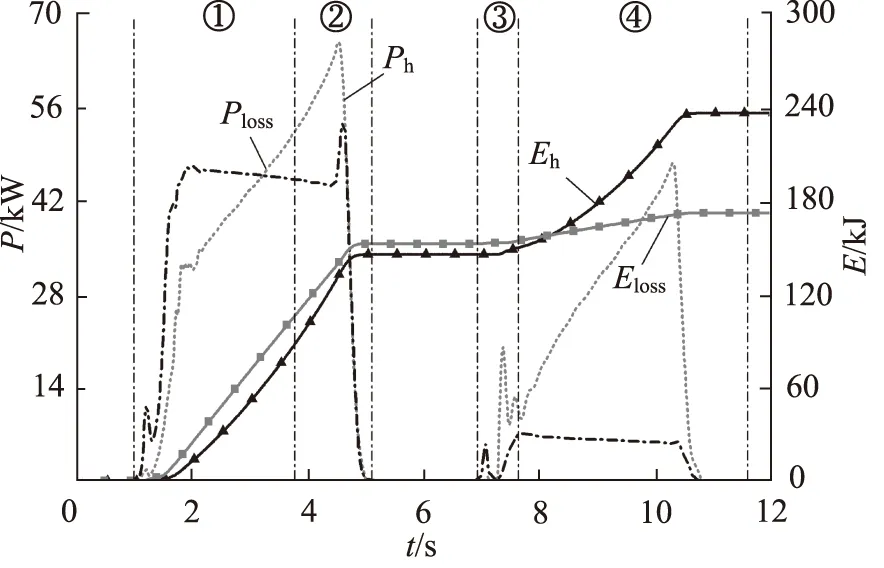
图8 电液流量匹配控制斗杆系统功率和能量Fig.8 Energy characteristics of electro hydraulic flow matching control arm system
泵阀双源协同驱动斗杆系统功率和能量曲线如图9所示。斗杆液压缸伸出过程:在①阶段处于超越伸出工况,此时泵控单元定量泵输出功率P1为负值,最大为-29.4 kW,采用泵控单元吸收斗杆等执行器重力势能,并通过伺服电机制动电阻以热能形式耗散,电控变量泵输出功率P2保持较小值8 kW,补偿液压缸不对称流量,其中节流损失功率减小至2.5 kW;在②阶段阻抗伸出工况,由于初始阶段液压缸有杆腔压力大于无杆腔压力,因此定量泵输出功率短暂为负值,随后泵控单元和阀控单元共同驱动斗杆液压缸伸出。斗杆液压缸缩回过程中,定量泵输出功率随,斗杆外摆不断增大,最大为35 kW;进一步计算得到斗杆运行一个周期,液压系统输出能量Eh为86.5 kJ,节流损失Eloss为11.8 kJ,通过伺服电机制动电阻消耗的能量Er为48.9 kJ。

图9 泵阀双源协同驱动斗杆系统功率和能量Fig.9 Energy characteristics of valve control and pump control dual source cooperative drive arm system
采用电液流量匹配控制系统和本研究所提系统对斗杆进行控制,两种系统能耗特性对比如表2所示。斗杆运行一个周期,泵阀双源协同驱动非对称液压缸系统相比电液流量匹配控制系统,系统能耗降低63.3%,系统节流损失降低93.1%。

表2 两种系统能耗特性对比Tab.2 Comparison of energy consumption characteristics of two systems
5 结论
(1) 提出一种泵阀双源协同驱动非对称液压缸系统,采用泵控单元控制液压缸速度方向和大小,阀控单元补偿不对称流量,有效降低了系统节流损失。仿真结果表明,与电液流量匹配控制系统相比,泵阀双源协同驱动非对称液压缸系统可以降低能耗达63.3%,并具备能量回收潜力;
(2) 相比于电液流量匹配控制系统,采用泵阀双源协同驱动非对称液压缸系统,有效降低了液压缸两腔压力,进一步改善了系统运行平稳性;
(3) 本研究主要对泵阀双源协同驱动单执行器系统展开了研究,为进一步能量回收利用和多执行器系统特性研究奠定了基础。
猜你喜欢
机械设计与制造(2022年7期)2022-07-27
机械工程师(2020年5期)2020-06-19
成组技术与生产现代化(2019年3期)2020-01-14
航天电子对抗(2019年4期)2019-06-02
数学年刊A辑(中文版)(2018年2期)2019-01-08
建筑机械化(2018年6期)2018-06-29
自动化学报(2018年2期)2018-04-12
导航定位学报(2015年2期)2015-06-05
电测与仪表(2015年4期)2015-04-12
中国医学科学院学报(2010年6期)2010-03-25
