
机带海水冷却电液伺服系统反步抗扰控制研究
2021-12-16 06:14邵钢,沈伟,孙侨
液压与气动 2021年12期
邵 钢,沈 伟,孙 侨
(1.中国船舶集团有限公司第七〇三研究所,黑龙江 哈尔滨 150000; 2.上海理工大学 机械工程学院,上海 200093)
引言
近些年来,中国的船舶行业取得了飞速的发展[1]。由于液压元件快速性好、功重比大和抗负载能力强等特点[2-3],液压系统在船舶上得到了广泛应用。船舶主要的液压系统包括舵机系统、推进器和冷却系统等。电液伺服控制系统是一种高阶非线性系统,普遍存在结构不确定性和各种匹配和不匹配干扰,这给系统的精确控制带来很多困难[4-5]。对于电液伺服控制系统,学者们研究了许多种控制方法,如滑模控制[6-8]、平坦控制[9]和反步控制[10-14]等,然而,这些方法都需要全状态反馈量,其中速度通常需要位置微分获取,这样就会放大测量噪声,降低控制效果。因此,WONHEE K等[15]使用了一种基于高增益观测器的无源输出控制,JING Chenghu等[16]设计了一种基于扩张状态观测器的平坦控制方法,YAO J等[17]和GUO Q等[18]设计了一种基于扩张状态观测器的反步控制方法,这些方法可以获取速度和压力,但是没有观测系统中的非匹配干扰,这样非匹配干扰就会影响系统跟踪性能。DAEHEE W 等[19]采用2个高增益干扰观测器,能够实现分别观测系统中存在的2种干扰,这为本研究中非匹配干扰的估计和补偿提供了一种思路。前述的控制方法可以发现反步法是一种非常适合高阶非线性系统的控制器设计的方法,通过对系统的空间模型进行反向推导,逐层降低模型的阶数,进行控制率的设计。本研究采用反步法,通过选择合适Lyapunov函数,反步递推得到电液伺服系统控制率,另外状态观测器被用来观测速度和压力状态,同时干扰估计器估计非匹配干扰,进而实现状态的反馈和干扰的补偿,提高系统跟踪性能,并对观测误差和系统跟踪误差的收敛性进行了证明。
1 系统原理与模型
1.1 系统构成
船舶液压系统原理如图1所示,主要由定量泵、溢流阀、单向阀、伺服阀、液压马达及一些辅件构成。在本研究中,船舶液压系统是一个角位置伺服系统。定量泵提供油源,溢流阀调定系统供油压力,通过给伺服阀电流信号控制液压马达按照预期轨迹实现精确位置跟踪。

图1 液压系统原理图Fig.1 Schematic diagram of hydraulic system
1.2 液压系统模型
对于阀控液压马达系统来说,最终是液压执行元件——液压马达带动负载进行运动或者做功。负载与液压马达轴连接,以液压马达轴为研究对象进行受力分析,可得马达负载力矩平衡方程:

(1)
式中,Jm—— 马达负载等效转动惯量,kg·m2
Bm—— 马达负载等效阻尼系数,N·m·rad-1·s
Gm—— 马达负载刚度,rad
Tm—— 作用在马达旋转轴上的外负载力矩,
N·m
θ—— 马达转角,rad
定义液压马达负载流量和负载压力分别为:
(2)
式中,q1—— 进入液压马达进油腔流量,m3/s
q2—— 从液压马达回油腔流出的流量,m3/s
p1—— 液压马达工作腔压力,MPa
p2—— 液压马达回油腔压力,MPa
根据负载压力的定义,式(1)可以进一步写成:
(3)
伺服阀阀芯位移改变,使得流量从阀口进入液压马达两腔。考虑泄漏和油液压缩性,液压马达两腔流量连续性方程为:
(4)
式中,Cim—— 液压马达内泄漏系数,m3/(Pa·s)
Cem—— 液压马达外泄漏系数,m3/(Pa·s)
Dm—— 马达排量,m3/rad
βe—— 油液弹性模量,Pa
Vm1—— 液压马达进油腔控制容积,m3
Vm2—— 液压马达回油腔控制容积,m3
考虑阀是零开口四通滑阀,且4个阀口是对称且匹配的。可以得到关系式ps=p1+p2近似成立。因此,可以得到:
(5)
液压马达叶片转角为θ,则液压马达两腔容积可以表达为:
(6)
式中,Vm0—— 液压马达叶片处于中位时进油腔和回油腔初始控制容积,m3
利用式(5)和式(6),式(4)中的式子相减可得,液压马达负载流量连续性方程为:
(7)
式中,Ctm—— 液压马达的总泄漏系数,m3/(Pa·s)
Vm—— 液压马达总控制容积,m3
其中,Ctm=Cim+0.5Cem,Vm=2Vm0。
根据节流口流量与压力之间的关系式可得,伺服阀流量方程为:
(8)
式中,Cd—— 伺服阀阀口流量系数
ωm—— 伺服阀节流口面积梯度
sign(xv) —— 阀芯位移xv的符号函数。
目前,伺服阀的制造技术成熟,控制精度高。工作原理是伺服放大器将来自工控机的电压信号转换成电流信号输出到伺服阀。本研究采用的伺服阀的工作频率远高于液压马达,因此,将输出的指令电压与伺服阀输入电流之间看成一个比例环节,即:
xv=kvu
(9)
式中,xv—— 伺服阀阀芯位移,m
kv—— 动态比例系数,m/V
u—— 电压信号
2 反步抗扰控制设计与分析

(10)
式中,R—— 未建模动态干扰(伺服阀和电气环节动态)

为了准确控制液压马达转角,将利用反演设计方法设计系统控制率。将系统状态方程式(10)中的每个方程当作1个子系统,那么式(10)可以分为3个子系统。对于第一个子系统,可以看成状态x2为输入,状态x1为输出的单输入单输出系统。首先定义系统跟踪误差为e1=x1-x1d,针对第一个子系统选择Lyapunov函数为:
(11)
根据系统状态方程以及误差e1定义,Lyapunov函数V1的导数为:
(12)
为第一个子系统的输入x2设计一个虚拟控制量x2d为:
(13)
式中,k1—— 控制增益
对于第二个子系统,可以看成状态x3为输入,状态x2为输出的单输入单输出系统。定义状态误差e2=x2-x2d。针对第二个子系统选择Lyapunov函数为:
(14)
根据系统状态方程以及误差e2定义,Lyapunov函数V2的导数为:

(15)
为第二个子系统的输入x3设计一个虚拟控制量x3d为:
(16)
式中,k2—— 控制增益
对于第三个子系统,可以看成实际控制信号u为输入,状态x3为输出的单输入单输出系统。定义状态误差e3=x3-x3d。针对第2个子系统选择Lyapunov函数为:
(17)
根据系统状态方程以及误差e3定义,Lyapunov函数V3的导数为:
(18)
设计实际控制率u为:


(19)
式中,k3—— 控制增益
在设计的控制率和虚拟控制量中包含未知量Tm和R,而且转速一般不能直接微分获得。因此,需要设计状态和干扰观测器。根据系统方程可知,干扰可以表达为:
(20)
根据不确定性和干扰估计器推导过程[20-21]可知,可以用干扰表达式低通滤波对干扰进行估计,即:
(21)
式中,Gf1,Gf2—— 低通滤波器传递函数
Gf1和Gf2的表达式为:
(22)
式中,km3,kh2—— 低通滤波器时间常数
在本系统中,实际可测的为转角x1和压力x3,因此,可以设计观测器:
(23)
式中,km1,km2,kh1—— 观测器增益

(24)
3 反步抗扰控制稳定性分析
1) 状态和干扰观测器稳定性
定义估计误差:
(25)
根据系统模型式(9)、干扰表达式(20)、干扰估计式(21)、状态估计式(23)和估计误差的定义式(25)可得,误差的动态为:
(26)
为了证明状态和干扰观测器稳定性,定义一个辅助状态向量为:
(27)
误差动态式(26)可得:
(28)
式中,
选择参数km1,km2,km3,kh1,kh2使得矩阵Aε具有负实数特征值,则存在一个对称正定矩阵Pε使得:
(29)
式中,Qε—— 正定对称矩阵
对于动态方程式(28),选择Lyapunov函数为:
Vε=εTPεε
(30)

≤-λmin(Qε)‖ε‖2+2‖PεB1‖‖ε‖d1+
2‖PεB2‖‖ε‖d2
(31)
式中,λmin(Qε) —— 正定对称矩阵Qε最小特征值
对于Lyapunov函数式(29),下列不等式成立:
λmin(Pε)‖ε‖2≤Vε≤λmax(Pε)‖ε‖2
(32)
其中,λmin(Pε),λmax(Pε)分别代表正定对称矩阵Pε最小和最大特征值。
结合不等式(32),式(31)可以进一步整理为:
(33)

根据式(33)可以推断,状态和干扰观测器是稳定的,状态和干扰估计误差能够收敛到包含0的邻域内。
2) 整体闭环系统稳定性
将虚拟控制量和实际控制率分别代入Lyapunov函数式(11)、式(14)和式(17)可得:
(34)
为了证明状态和干扰观测器稳定性,选择Lyapunov函数为:
V=V1+V2+V3+Vε
(35)
其导数为:
λεVε+γ3‖ε‖2+σε
(36)
式中,γ1,γ2—— 正常数,γ3=min{1/2γ1,1/2γ2}
根据各个Lyapunov函数,式(36)可以进一步整理为:
λεVε+γ4Vε+σε≤-λV+σε
(37)
其中,γ4=γ3/λmin(Pε),λ=min{2k1,2k2-γ1,2k3-γ2,λε-γ4}。
根据式(37)可以推断,基于控制器式(24)的整体闭环控制系统是稳定的,跟踪误差能够收敛到包含0的邻域内。
4 仿真分析
为了证明所提方法的有效性和优越性,本研究选用经典PID控制和反步控制作为对比。仿真用的系统参数如表1所示。
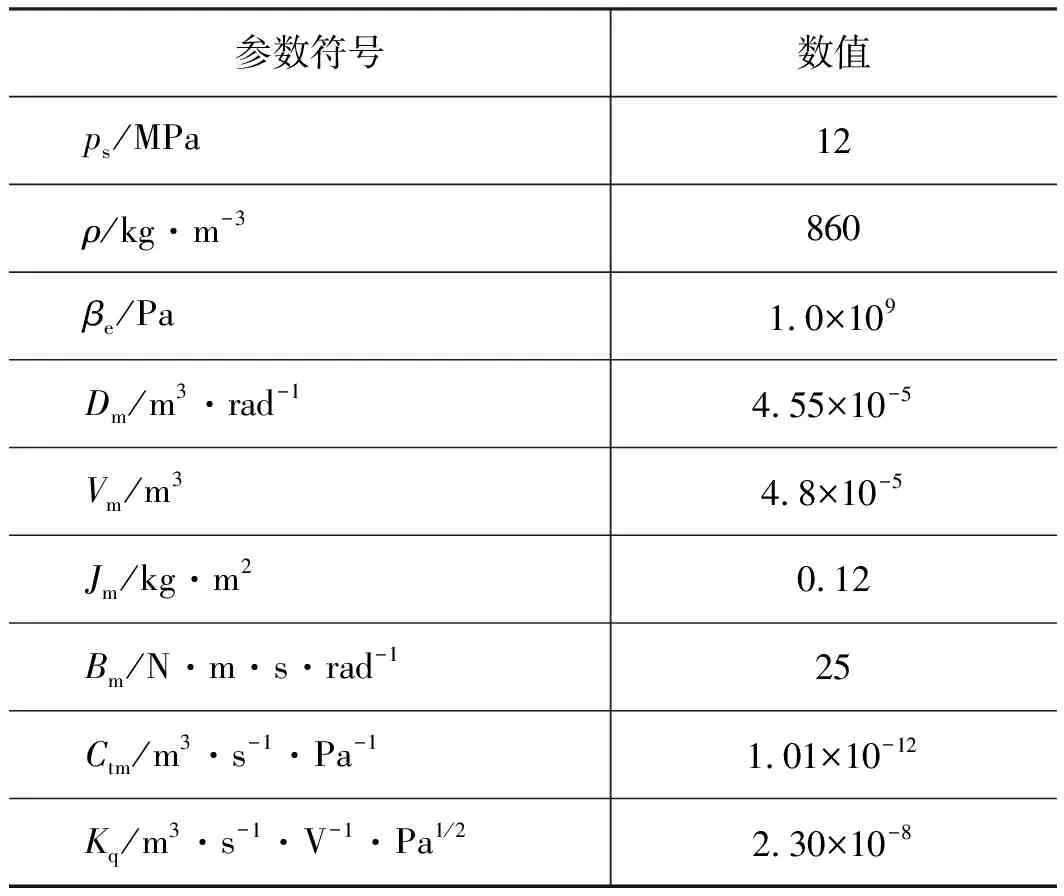
表1 仿真用系统参数Tab.1 System parameters for simulation
设定PID控制中的比例、积分和微分增益分别为180,200,0.1;设定所提反步抗扰控制器参数为k1=550,k2=1000,k3=5000,km1=450,km2=67500,km3=3.5×106,kh1=500,kh2=10000;设定反步法控制器与反步抗扰控制法的参数一样。
首先,在没有干扰的情况下让系统跟踪频率-幅值为5 Hz-0.1745°的正弦指令信号,图2给出了3种控制器下系统跟踪性能。从图2中不难看出,反步控制和反步抗扰控制下系统跟踪性能差不多,PID控制下系统跟踪性能比较差。反步和反步抗扰具有模型补偿,而PID没有模型补偿,具有一定的相位损失,因此跟踪性能较差。

图2 无干扰系统跟踪性能Fig.2 Tracking performance of system without disturbance
为了进一步验证所提反步抗扰控制的性能,在模型中加入非匹配干扰Td=200和匹配干扰R=10000 sin(πt),图3给出了有干扰时3种控制器下系统跟踪性能。从图3中可以看出,所提控制下系统跟踪性能比较好,PID控制和反步控制下系统跟踪误差相对0向下偏移,这是因为非匹配干扰的影响。而所提控制下系统跟踪误差在0很小的邻域内波动,这是因为所提控制方案中有状态和干扰观测器估计出系统干扰并进行补偿。图4和图5分别给出了状态和干扰观测器估计的系统状态和干扰。从图4中可以明显看出,仅在起始阶段观测值与测量值有较大的偏差,在很短的时间内状态观测器就较好的估计了系统的状态。

图3 有干扰时系统跟踪性能Fig.3 Tracking performance of system with disturbance

图4 状态估计结果Fig.4 Estimated results of states

图5 干扰估计结果Fig.5 Estimated results of disturbances
5 结论
本研究针对船舶传动装置机带海水冷却系统的电液伺服系统,详细地建立了其数学模型,提出了一种状态和干扰估计器估计系统状态、非匹配干扰和匹配干扰,利用估计的状态和干扰方法设计了一种反步抗扰控制器;利用李雅普诺夫稳定性定理证明了状态和干扰估计器估计误差能够收敛到有界范围内,整体闭环系统跟踪误差也是一致渐进有界稳定;采用PID控制和反步控制作为对比,仿真验证所提的反步抗扰控制策略的有效性,仿真结果表明所提控制方法能够利用状态和干扰估计器估计状态用于状态反馈,并且能够估计非匹配和匹配干扰进行补偿,具有较高的抗干扰鲁棒性,相比其他两种方法具有较好的性能。
猜你喜欢
重型机械(2020年2期)2020-07-24
中北大学学报(自然科学版)(2020年1期)2020-03-17
制造业自动化(2018年7期)2018-07-21
中南大学学报(自然科学版)(2017年8期)2017-11-01
小学生导刊(2017年15期)2017-05-17
棋艺(2016年4期)2016-09-20
中国塑料(2016年3期)2016-06-15
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
