
传感器故障下发射装置筒盖系统的容错控制
2021-12-16 06:14殷士才
液压与气动 2021年12期
卫 超,沈 刚,殷士才,李 翔,汤 裕
(1.中国船舶重工集团公司第七一三研究所,河南 郑州 450000; 2.中国矿业大学 机电工程学院,江苏 徐州 221116)
引言
潜艇是公认的战略性武器,有隐身性能好、机动能力强、突袭威力大等优点[1]。筒盖系统是导弹发射装置的重要组成部分,主要用于实现导弹垂直发射前后的开启和关闭功能,为导弹发射提供通道。为了潜艇导弹顺利发射,必须保障筒盖系统的顺利启闭,保障其开关盖运行的稳定性[2]。
筒盖系统的伺服动力系统主要由电液系统组成,实现筒盖装置的启闭功能[3]。筒盖系统随潜艇在复杂海洋环境下服役,筒盖装置发生未知故障的风险提高,在潜艇运行过程中无法人为对其设备进行修复干预。角度传感器作为筒盖系统大闭环控制的重要装置,其运行工况的稳定性,直接影响到筒盖系统开关盖过程的稳定性[4]。因此,提高筒盖系统的可靠性和安全性,保障筒盖系统在传感器故障工况下的可靠运行,对潜艇导弹顺利发射具有重要意义。
为了实现筒盖系统在传感器故障工况下的安全稳定运行,首先要对其进行传感器故障工况的状态估计实现筒盖系统的故障信号提取与诊断。故障信号的提取分析是一个多学科融合的研究领域。励文艳等[5]将局部s变换和极限学习机结合的分析技术引入,用于诊断柱塞泵滑靴磨损故障;张兆东等[6]基于小波分析提取液压缸内泄漏故障特征值,同时运用小波变换获得信号时频特性,实时判断液压缸内泄漏故障;杜名喆等[7]提出了一种将经验小波变换和卷积神经网络融合的液压泵故障分类诊断方法;郭隽侠等[8]将子空间辨识应用于判断液压缸泄漏故障的类型与严重程度。特别地,对于传感器故障的诊断分析,张文瀚等[9]针对具有传感器故障和未知扰动与测量噪声的线性离散系统,提出了一种传感器故障区间估计方法;NOSHIRVANI G[10]提出了一种基于模型的鲁棒故障检测与隔离方法,该方法能够在噪声环境下检测传感器故障;JIA W H等[11]使用未知输入观测器来生成残差,该方法通过解耦未知输入与状态估计误差来实现残差与未知输入之间的解耦。
为了实现筒盖系统在传感器故障工况下的安全稳定运行,保障筒盖系统对故障的不敏感性,对其进行容错控制器设计。郝立颖等[12]针对带有推进器故障的船舶动力定位系统, 设计一种可在线辨识故障信息的自适应滑模容错控制器;刘聪等[13]基于线性矩阵不等式设计了状态和故障一体化的鲁棒主动容错控制器,实现执行器故障的鲁棒重构;LIU X H等[14]基于定量反馈技术设计了非线性系统的容错控制器,并基于QFT设计了相应的鲁棒控制器,保证了系统在故障模式下的稳定性;沈世焜等[15]设计了双层Kalman滤波器分别实现对执行器间歇故障的检测隔离和滤波器增益重构,并利用最优估计结合线性二次型高斯等构造主动容错控制器,保证间歇故障时的系统可控性。
本研究针对筒盖系统启闭过程的传感器故障工况,提出了一种结合PI观测器与鲁棒控制器的容错控制,实现了筒盖系统在传感器故障工况下的自愈合,降低了筒盖系统对传感器故障的敏感性。
1 筒盖系统的非线性数学模型
发射装置筒盖系统伺服作动系统如图1所示,该阀控缸采用比例调速阀进行系统控制。假设其是零开口阀,供油压力ps恒定,回油压力p0为0 MPa。

图1 发射装置筒盖系统伺服作动系统Fig.1 Schematic diagram of servo actuation system for launcher switch cover system
忽略油液特性,筒盖系统流程方程表示如下:
(1)
式中,Cd—— 阀内节流口流量系数
ω—— 阀芯周长
xv—— 阀芯位移
kR—— 比例调速阀减压弹簧刚度
xc—— 节流口开口为0时弹簧压缩量
ρ—— 液压油密度
AR—— 减压阀芯的最大截面积
pL是负载压降,定义为pL=p1-p2。阀控缸的流量连续性方程为:
(2)
式中,Ap—— 活塞有效作用面积
Ctp—— 阀控缸内泄漏系数
Vt—— 阀控缸两腔的总容积
βe—— 油液有效体积弹性模量
忽略筒盖系统摩擦阻力,筒盖系统的力平衡方程为:
(3)
式中,m—— 执行机构阀控缸恒定负载质量
Bp—— 液压缸黏性阻尼系数
FL—— 筒盖系统的未知干扰和筒盖自身重力
2 控制器设计
如图2所示是筒盖系统安全运行容错控制方案,基于观测器实现对传感器故障实时估计,利用信号重构技术实现对筒盖系统的传感器故障工况下安全稳定运行。

图2 发射装置筒盖系统安全运行容错控制Fig.2 Schematic diagram of fault tolerant control for safe operation of launcher switch cover system
2.1 故障观测器的设计
导弹发射装置的筒盖系统最为常见、影响最大的传感器故障工况是因光电编码器出现故障而导致的角度信号反馈故障,可按照其故障性质将故障形式划分为非恒定性故障、突变性故障和完全失效故障。其中非恒定性故障为倾角传感器增益异常降低,传感器将系统的实际状态降低后反馈输出至控制系统;突变性故障表现形式为角度反馈与系统真实状态之间持续为某一差值状态;完全失效故障表现形式为持续向控制系统反馈不变值。
上述3种传感器故障均会造成系统实际的输出值与被控对象的真实变量不一致,造成无法完成开关盖运行控制。上述传感器故障形式可统一表示为:
ysf(t)=Cxi(t)+φsfvsf(t)
(4)
式中,xi(t) —— 筒盖系统的真实状态变量
ysf(t) —— 筒盖系统的传感器测得的状态变量
vsf(t) —— 筒盖系统传感器的故障函数
C—— 筒盖系统的常数矩阵
φsf—— 筒盖系统的故障分配矩阵
为实现对筒盖系统传感器故障进行补偿,根据上述故障描述,对发射装置筒盖系统设计了PI观测器对其传感器故障值进行估计,对其故障反馈信号进行重构矫正。设计的PI观测器如下所示:
(5)
式中,KP,H—— 观测器的增益矩阵
定义观测器误差:

=Ax(t)+Bu(t)+w-
(6)
将式(6)进行如下表示:
(7)
定义Ae:
(8)
定义Lyapunov函数:
(9)
则:
(10)

则保障KP=P-1Y,H=Q-1M满足式(10)即可。
(11)
2.2 容错控制器的设计
基于传感器故障重构信号,选取筒盖系统状态变量如下:
ysft=[ysft1ysft2ysft3]
(12)
结合式(11)以及筒盖系统的系统建模,其闭环控制状态方程如下:
(13)
根据建立的传感器故障工况下筒盖系统的状态方程,设计容错控制系统的控制器,其具体设计过程如下:
定义系统误差,其中Ξ1,Ξ2为虚拟控制变量:
(14)
第一步:定义筒盖系统容错控制过程中的角度轨迹偏差:
Λsft1=ysft1-Θr
(15)
筒盖系统容错控制误差导数为:
(16)
定义容错信号误差ysft1的Lyapunov函数Vsft1:
(17)
求得Lyapunov函数Vsft1的导数:
则定义虚拟控制变量为:
(19)
则:
(20)
为了保障一阶控制系统稳定,开展容错控制器下一步工作,使Λsft2→0。
第二步:结合二阶虚拟控制变量得到二阶误差导数:
(21)
同时考虑θsft1参数的不确定性,将式(21)改写为:
(22)
定义二阶系统的Lyapunov函数Vsft2:
(23)
其中,Γ1为θsft1的自适应变化率增益。
则得到Lyapunov函数Vsft2微分方程表达式为:
(24)
定义三阶虚拟变量如下:

(25)
则Vsft2微分方程的以下表达式如下:
(26)
先不考虑其他不确定参数,为了保障二阶系统的稳定性,开展容错控制器下一步工作,使Λsft3→0。
第三步:结合上述表达式得到三阶虚拟变量微分方程:
(27)
式中:
(28)
考虑其他不确定系统参数得到筒盖系统Λsft3的Lyapunov函数Vsft3:
(29)
其导数为以下形式:
(30)
为了保障筒盖系统稳定性,得到其容错控制输入信号为:
(31)
筒盖系统不确定性参数自适应率如下:
(32)
结合上述公式,得到以下方程:
(33)
因此,证明筒盖容错控制系统稳定。
2.3 仿真验证
利用Simulink搭建了筒盖系统故障模拟仿真平台,对其进行传感器故障注入。
首先,利用MATLAB中的Simulink对推导的反步控制器进行仿真验证,其中筒盖系统物理参数如表1所示。

表1 液压系统参数列表Tab.1 Parameters of hydraulic system
如图3所示,基于故障观测器的容错控制器在其关盖期间实现了筒盖系统在传感器故障工况下的平稳运行,降低了传感器故障筒盖系统造成的损害。其中,筒盖角度为a,误差角度为a1。
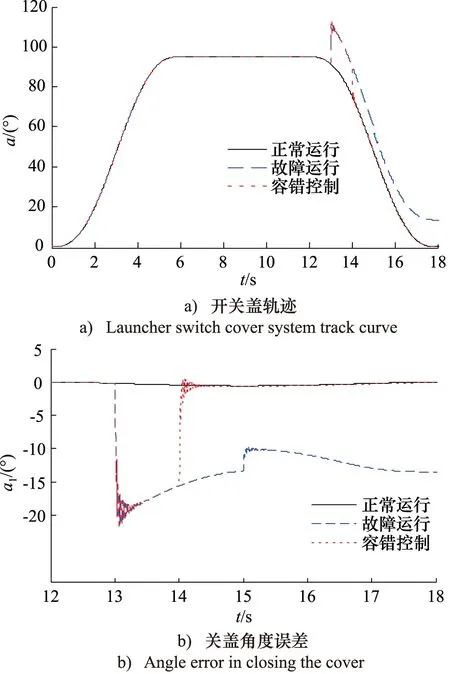
图3 传感器故障工况容错控制器性能仿真对比Fig.3 Performance simulation of fault tolerant controller under sensor malfunction
3 试验验证
3.1 试验台
水下发射井筒开关盖试验模拟装置如图4所示,该装置主要由阀控缸作为动力源控制筒盖进行开盖运动和关盖运动,进而模拟发射期间的启闭运行动作。有内嵌式编码器反馈筒盖开盖与关盖时刻角度,实现筒盖系统的闭环控制。
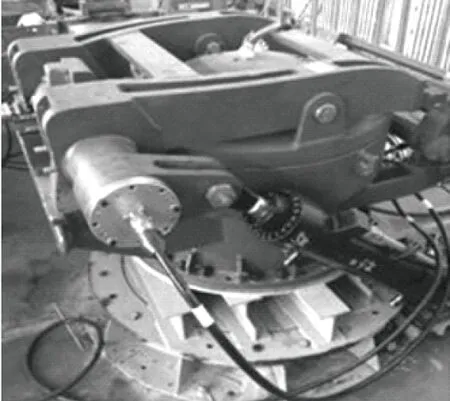
图4 水下发射井筒开关盖试验装置Fig.4 Experimental equipment for underwater launcher switch cover system
图5是水下发射井筒开关盖装置试验台控制系统原理图。
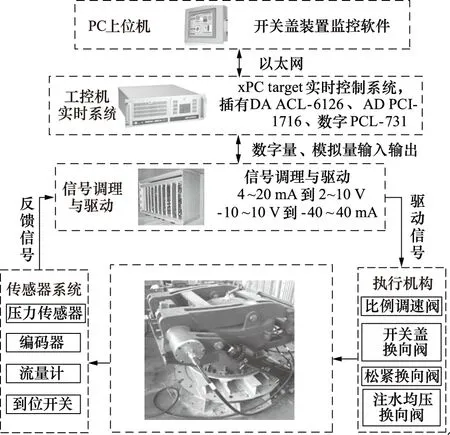
图5 水下发射井筒开关盖装置试验台控制原理Fig.5 Control principle of experimental equipment for underwater launcher switch cover system
筒盖系统的运行轨迹控制信号由工控机发送电压信号-10~10 V的驱动信号实现筒盖系统的开关盖作业,由D/A板卡ACL-6126发送,产生调速阀电压信号并经过信号调理系统转换为-40~40 mA的电流信号进行控制调速阀的开口大小,最终实现对筒盖装置的运行控制。
3.2 试验结果
通过系统模拟装置,注入相应的传感器故障,进行筒盖系统传感器故障工况模拟。图6为筒盖系统在传感器故障工况下无容错控制筒盖角度状态对比图,从图中可以明显得出,当筒盖系统发生传感器故障工况后无法正常完成开关盖运动,并对筒盖装置造成损害。图7为筒盖系统传感器故障工况容错控制性能对比图,在关盖运行状态中注入了传感器故障,对比了无故障运行、故障无容错运行和故障容错运行系统实际状态。从图中可以明显看出,本研究提出的容错控制器实现了对传感器故障的抑制,一定程度上保障了筒盖系统在传感器故障工况下的运行状态。同时根据表2可以更直观地得出,本研究提出的容错控制器对筒盖系统的传感器故障起到了一定的抑制作用。

表2 筒盖系统容错控制定量分析Tab.2 Quantitative analysis for fault tolerant control of launcher switch cover system

图6 故障工况运行效果Fig.6 Operation effect under sensor malfunction

图7 故障工况控制性能对比Fig.7 Performance comparison of controllers under sensor malfunction
4 结论
针对水下发射井筒开关盖装置的传感器故障工况,设计了基于故障观测器的筒盖系统容错控制系统,并根据搭建的筒盖装置模拟设备进行了试验验证。试验结果表明,本研究提出的水下发射井筒开关盖装置的传感故障容错控制理论,对筒盖系统的传感器故障起到了一定的故障抑制,实现了筒盖系统的故障自愈,一定程度保障了其稳定运行。
猜你喜欢
煤气与热力(2022年4期)2022-05-23
舰船科学技术(2021年12期)2021-03-29
铁道通信信号(2020年1期)2020-09-21
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
水电站机电技术(2014年5期)2014-09-26
电测与仪表(2014年11期)2014-04-04
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
