GNSS实时动态授时精度分析
2021-12-21 09:19董孝松孙保琪杨海彦韩保民武美芳孟令达杨旭海
中国空间科学技术 2021年6期
董孝松,孙保琪,杨海彦,韩保民,武美芳,孟令达,杨旭海
1. 山东理工大学 建筑工程学院,淄博 255049 2. 中国科学院 国家授时中心,西安 710600 3. 中国科学院 精密导航定位与定时技术重点实验室,西安 710600 4. 中国科学院大学,北京 100049
1 引言
高精度时间是国家的重要战略资源,在国防建设和经济社会的运行中起着基础性的支撑作用[1]。授时服务是国计民生不可或缺的一部分。目前常用的授时手段包括短波授时、长波授时、互联网授时、电话授时、光纤授时及GNSS(Global Navigation Satellite System)授时等[2]。因为GNSS具有全球覆盖、全天候、全天时、低成本、高精度等特点[3-5],GNSS授时是目前使用最广泛的授时手段之一。北斗标准服务可实现10~20纳秒的授时精度[6]。随着社会经济和科学技术的发展,新一代移动通信、分布式观测网等对时间同步提出了纳秒级甚至更高精度的需求。此外,航天技术的迅速发展,高精度时间同步在航空航天领域也得以应用。例如各类航空航天飞行器需要借助高精度的时间同步来完成精密定轨和精密测量等工作[7],微小卫星的编队飞行也需要高精度的时间同步以实现协同工作等[8-9]。
尽管GNSS实时精密单点定位(Precise Point Positioning,PPP)可以实现亚纳秒量级的精密授时,但是该技术依赖精密可靠的实时卫星轨道和以标准时间为参考的实时卫星钟差产品[10-11]。
对于短距离高精度时间用户,基于实时动态(Real-Time Kinematic,RTK)定位思想的GNSS实时动态授时,可有效规避PPP授时对实时精密轨道和钟差产品的依赖问题,仅使用广播星历下有望实现与其一致的授时精度,以更简便的方式满足动、静态实时高精度授时需求。
2010年冯延明和李博峰提出同时解算接收机位置和相对钟差的四维实时动态定位方法(4D-RTK)[12],基于传统的双差方式确定用户位置,然后基于站间单差观测值解算用户与基准站之间的接收机相对钟差。利用一条21 km长的基线近90 min的观测数据(采样间隔为15 s)开展RTK授时试验,结果显示,150个历元后,接收机相对钟差参数内符合精度可达到0.1 ns。2013年黄观文等提出了一种基于单差观测值的连续载波相位时间传递方法[13],通过在流动站观测值上增加基准站改正数,以PPP的形式解算流动站与基准站之间的相对钟差。近年来众多学者对基于码伪距的共视授时进行了深入研究[14-17],也有少数学者开展了基于载波相位的共视时间传递研究[18-19],但是少有RTK授时等基于广播星历面向短基线用户载波相位实时授时的相关研究。
为了更好的验证RTK授时性能,本文首先给出了RTK授时数学模型,然后利用我国守时实验室的时频资源,基于长弧段观测数据开展了RTK授时试验,分析了试验结果。
2 RTK授时原理及数学模型
RTK授时原理与RTK定位类似:用户接收机通过通信链路实时接收基准站观测数据,与本机观测数据形成测站间一次差分,解算需要的未知参数。不同之处在于:1)RTK定位一般形成站星双差,消除了站间钟差,而RTK授时通过站间单差保留了站间相对钟差;2)RTK授时基准站外接标准时间信号,除了提供位置基准信息,也提供时间基准信息。
GNSS码伪距和载波相位观测方程:
式中:上标s为卫星号;下标i为测站;φs为载波相位观测值;ρs为测站与卫星之间的几何距离;dti为接收机钟差;dts为卫星钟差;Is为电离层延迟误差;Ts为对流层延迟误差;Ns为整周模糊度;mi为多路径效应,εs为观测噪声。
当两个测站(i为1和2)同步观测相同卫星的观测值,在观测站间做差,形成站间单差观测值,同时解算用户位置和接收机相对钟差:

(1)

(2)
由公式(1)和(2)可知,卫星钟差的影响已经被消除,当两测站距离不太远(例如30 km以内),由于电离层延迟与对流层折射的影响具有很强的相关性,测站间求一次差分几乎消除大气折射误差的影响。
3 试验平台与策略
3.1 试验平台
试验选取中国科学院国家授时中心(National Time Service Center, NTSC)临潼本部和西安航天基地两个园区的XIA6、XIA9和CAP1 三个GNSS连续跟踪站2020年2月13日(年积日(Day of year,DOY)第44天)至2020年4月14日(年积日第105天)共62天的观测数据。三个跟踪站的分布及信号连接情况如图1所示。三个跟踪站的接收机及天线类型等信息详见表1。
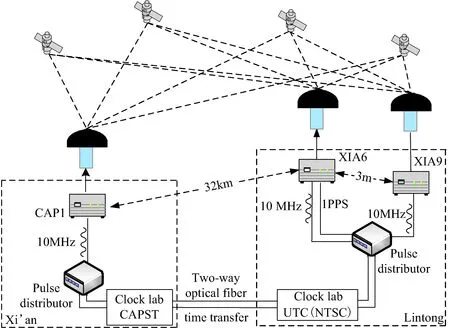
图1 跟踪站分布及外部时频信号连接情况Fig.1 Tracking station distribution and external time-frequency signal connection

表1 跟踪站信息
XIA6站与XIA9站位于临潼本部,距UTC(NTSC)钟房直线距离约95 m,两台接收机天线基墩相距约3 m。CAP1站位于西安航天基地园区,距离CAPS时钟房直线距离约130 m。CAPS时通过光纤双向时间频率传递等链路溯源到UTC(NTSC)。XIA6外接UTC(NTSC)10 MHz频率和1 PPS信号,CAP1站外接CAPS时10 MHz频率信号,并设置两台接收机均以外接信号作为工作频率。XIA9站外接UTC(NTSC)10 MHz频率信号,但是打开了钟驾驭选项(驾驭到GPS时)。试验选取XIA6作为授时基准站,CAP1和XIA9作为用户站(流动站)。
3.2 试验策略
试验基于改编的RTKLIB软件[20],以GPS为例,开展了GNSS RTK授时试验。为了便于分析,采用仿实时模式开展,将跟踪站多天观测文件拼接为一个文件,基于前向扩展卡尔曼滤波进行参数估计。
GNSS PPP和光纤是当前时间传递中的精度较高的常用技术手段。为了验证RTK授时精度,试验基于IGS提供的GPS卫星最终轨道和钟差产品以PPP模式计算三个测站整个试验弧段的连续钟差,形成对应基线的PPP时间传递链路结果。
表2列出了试验中RTK授时及PPP时间传递的处理策略。其中,截止高度角设置为15°,以尽量剔除精度较低、多路径干扰较为严重的观测值。
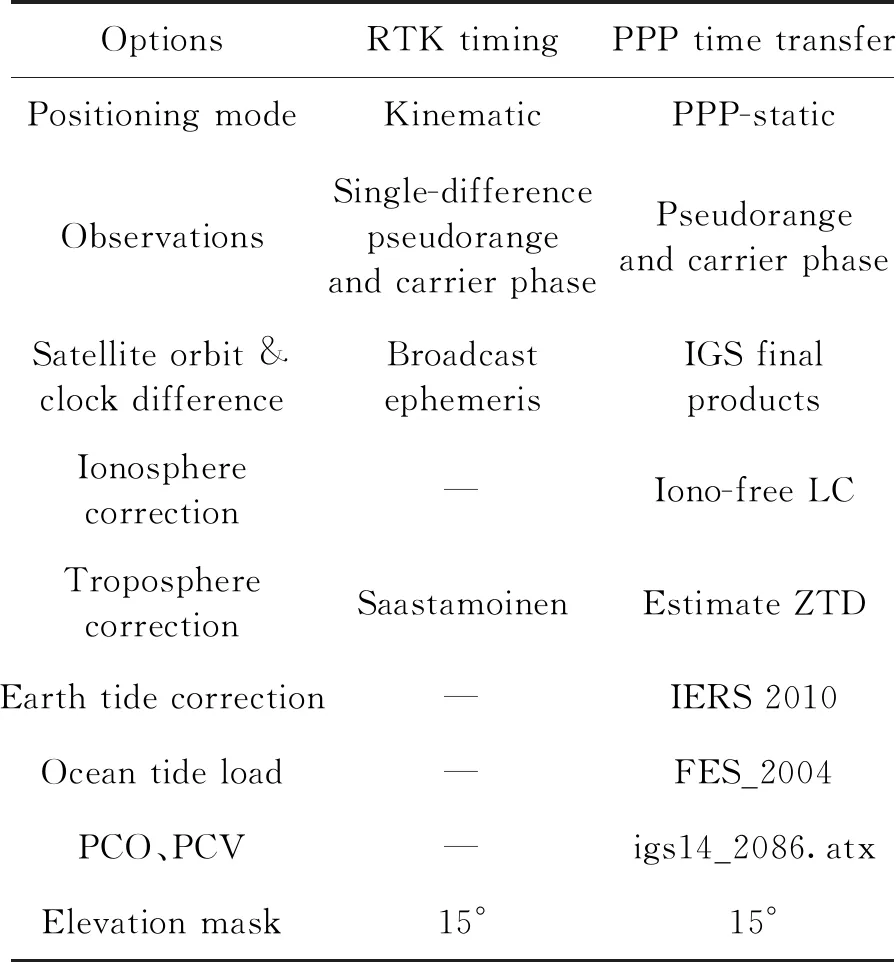
表2 RTK授时及PPP时间传递解算策略
此外,临潼-西安两地钟房之间布署的光纤双向时间频率传递设备,时间比对精度可达皮秒量级[21]。因此,除了PPP时间传递外,也利用光纤双向时间频率传递对CAP1-XIA6链路的RTK授时结果进行了外符合精度分析。
4 结果与分析
首先分析两条基线RTK授时结果与PPP时间传递结果的差异,其次基于光纤双向时间频率传递结果对基线CAP1-XIA6 RTK授时结果进行分析评估。
4.1 RTK授时结果与PPP时间传递结果比对分析
图2、图3分别给出了超短基线XIA9-XIA6和短基线CAP1-XIA6 RTK授时与PPP时间传递的结果。由于设备工作异常,CAP1站年积日第78天和第86天以及第97天至第105天共11天观测值缺失,没有解算结果。XIA9-XIA6基线解算结果完整。从图2、图3中可以看出,RTK授时结果与PPP时间传递结果的整体趋势基本一致,结果较为符合。对比图2和图3发现,超短基线(XIA9-XIA6)的RTK授时结果与PPP时间传递结果均具有较大的噪声。
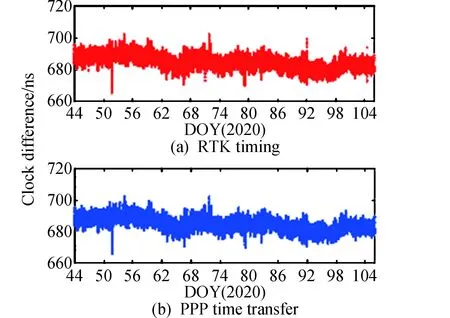
图2 XIA9-XIA6基线不同授时方法精度对比Fig.2 Accuracy comparison of different timing methods based on XIA9-XIA6 baseline
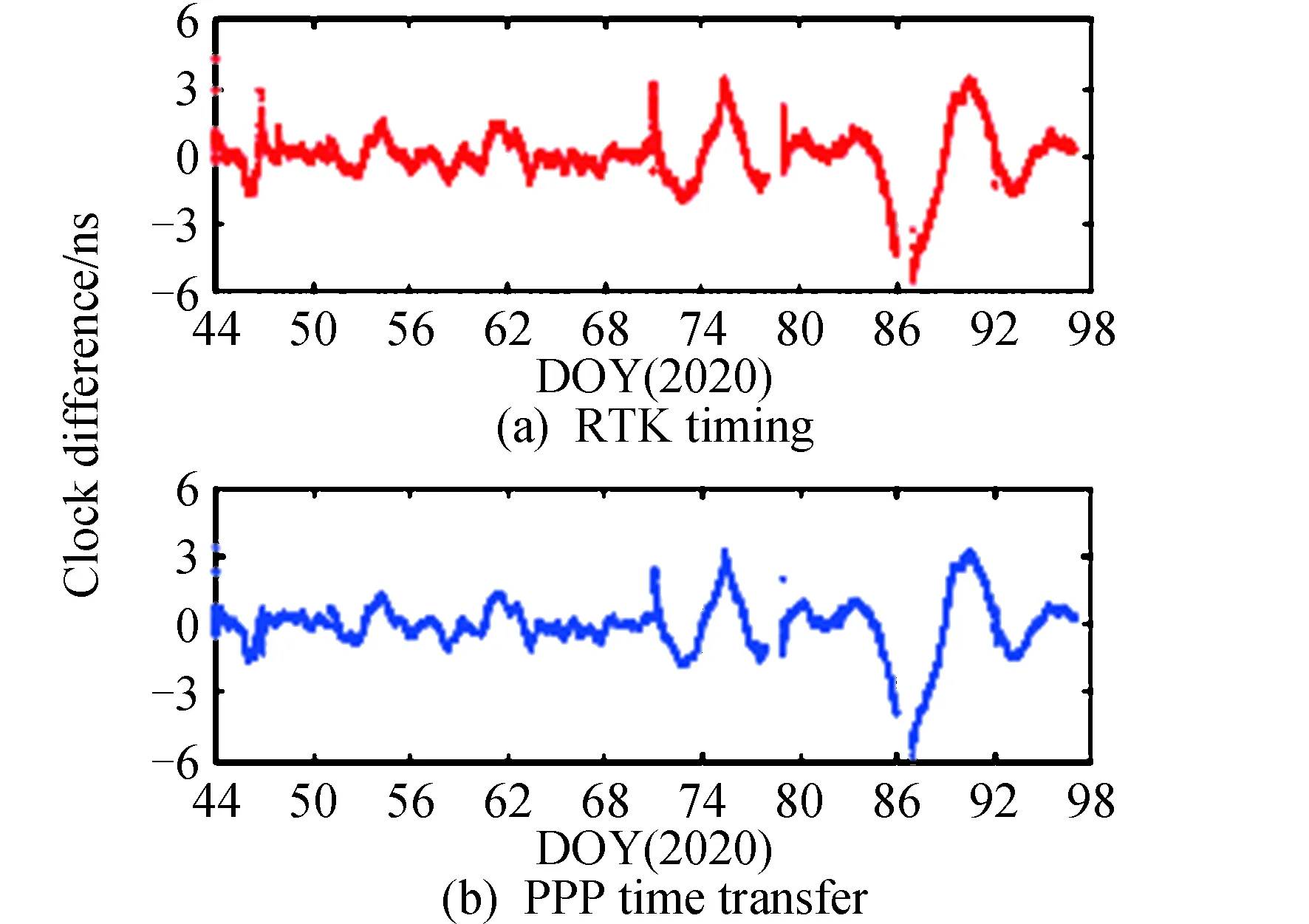
图3 CAP1-XIA6基线RTK与PPP授时精度对比Fig.3 Accuracy comparison of RTK and PPP timing methods based on CAP1-XIA6 baseline
为此,解算了测站XIA6和XIA9的PPP钟差,图4、图5分别给出了两站的钟差序列,可知上述噪声来源于XIA9接收机。通过图1可知,XIA6接收机同时外接UTC(NTSC)10 MHz频率信号和1PPS信号,接收机钟完全锁定到了外部的UTC(NTSC)。XIA9接收机尽管外接了UTC(NTSC)10 MHz频率信号,但是前期根据其他试验的需要,设置接收机驾驭到GPS时。由于数据长达2个月,图5中局部变化趋势不明显。选取第86天的结果放大发现,单天内XIA9 PPP结果起伏可达15 ns,因此,初步推断是因为XIA9接收机钟驾驭到GPS时造成的。
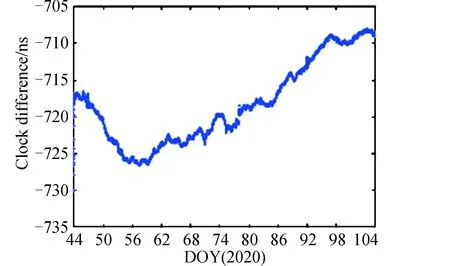
图4 基于PPP解算的XIA6接收机相对于IGST的钟差时间序列Fig.4 Time series of XIA6 receiver clock difference relative to IGST based on PPP estimation
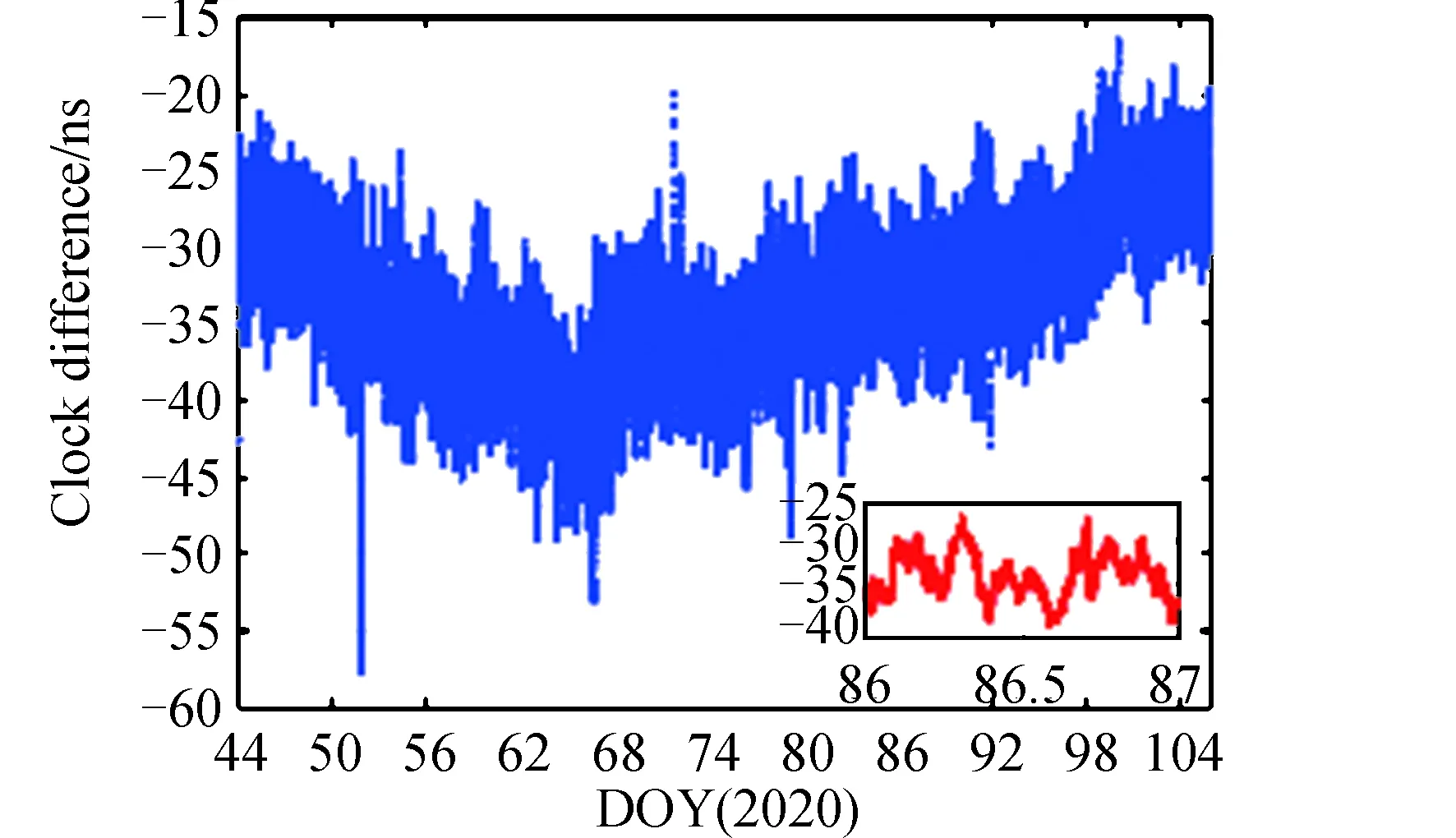
图5 基于PPP解算的XIA9接收机相对于IGST的钟差时间序列Fig.5 Time series of XIA9 receiver clock difference relative to IGST based on PPP estimation
由图2还发现,XIA9与XIA6两台接收机的相对钟差在670~700 ns之间波动。进一步查看两台接收机PPP解算的钟差(图4和图5),可知近700 ns的固定偏差来源于XIA6接收机,主要是由UTC(NTSC)钟房到接收机之间的全链路时延引起的。
由于短基线CAP1-XIA6中的CAP1接收机仅外接10MHz频率信号,没有输入1PPS脉冲信号,CAP1接收机钟与CAPS时之间存在一个数百微秒的常数偏差(接收机重启或重新接入10 MHz信号,该常数偏差会变化)。为了直观展现相对钟差的细微变化,图3中的钟差序列扣除了该常数偏差。
另外,图2和图3中显示RTK授时与PPP时间传递均出现多次重新收敛的现象,基线CAP1-XIA6的多次收敛现象更为明显,主要是由于CAP1的噪声小。通过对三个测站的观测数据分析发现,XIA9和XIA6两个测站在第46、47、71、78、92、93、98、104天均发生了信号失锁,致使几乎所有可视卫星在同一时刻发生了载波相位周跳,进而导致RTK授时和PPP时间传递解算中出现重新收敛的现象。短基线(CAP1-XIA6)除了上述XIA6测站信号失锁外,还因为缺失第78 d和86 d的数据,导致在连续处理过程中也出现了重新收敛的现象。
以PPP时间传递结果作为参考,用RTK授时结果与其相减,两条基线的RTK授时与PPP时间传递结果差异分别如图6和图7所示。
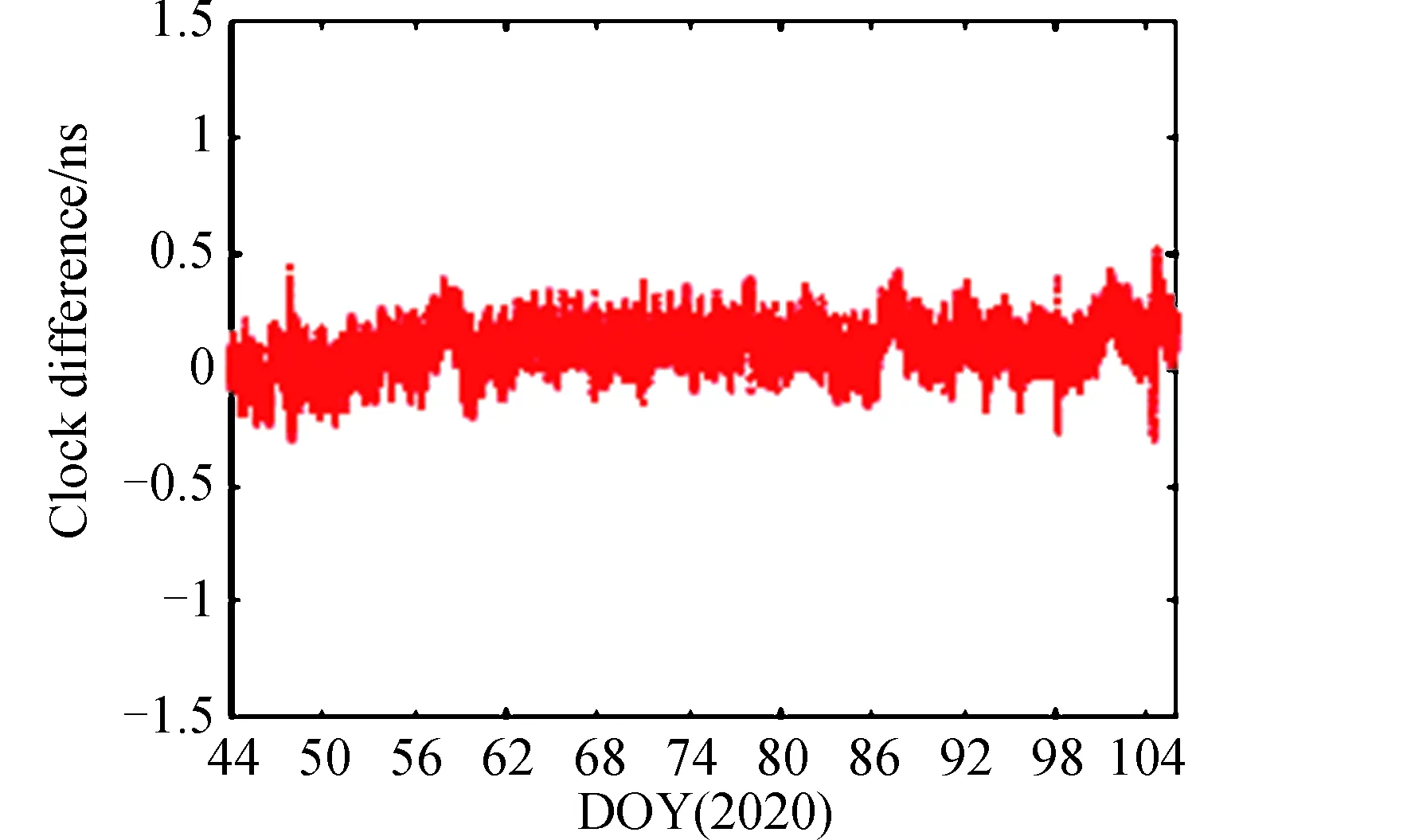
图6 XIA9-XIA6基线RTK授时与PPP时间传递比较结果Fig.6 Differences between RTK timing and PPP time transfer for baseline XIA9-XIA6
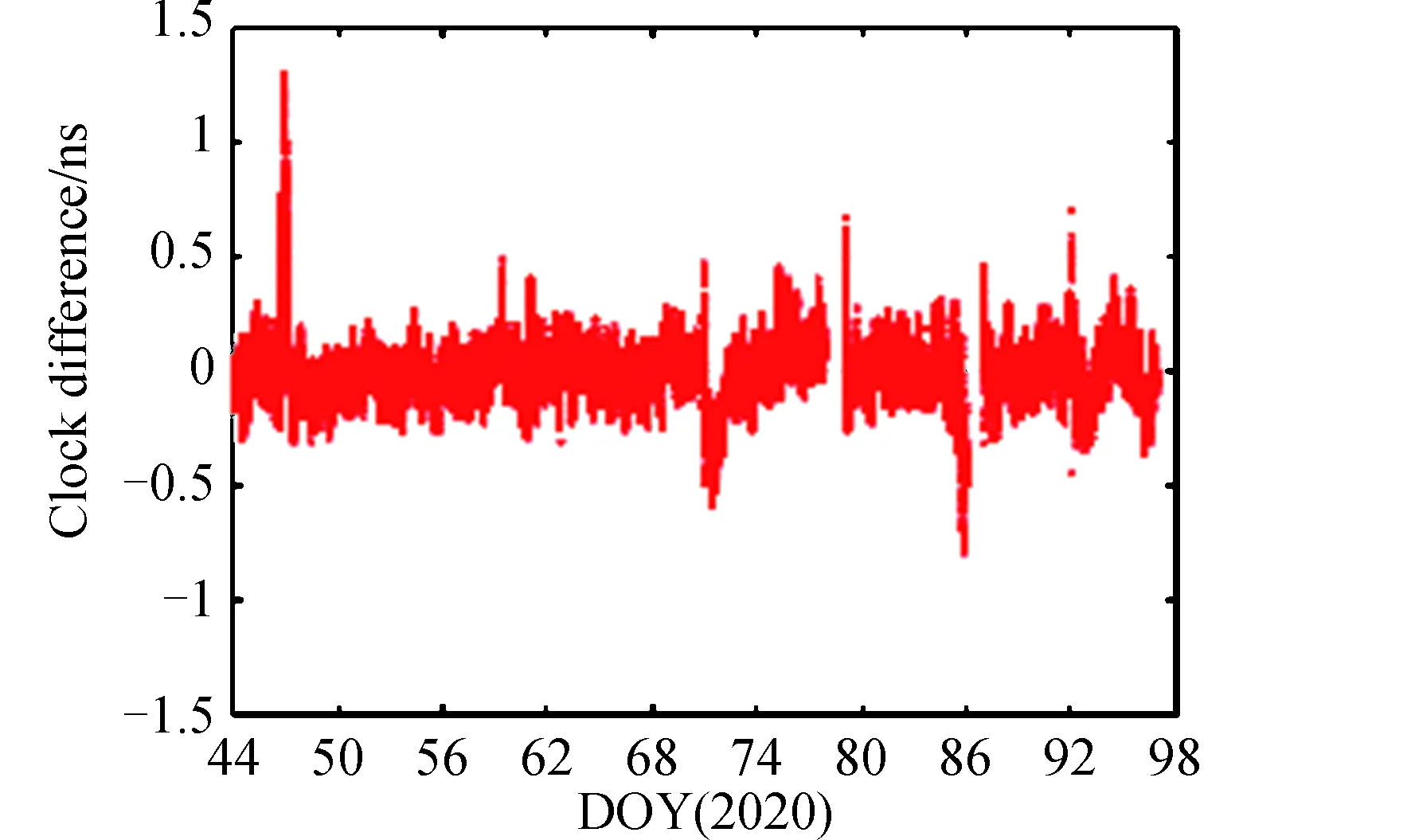
图7 CAP1-XIA6基线RTK授时与PPP时间传递比较结果Fig.7 Differences between RTK timing and PPP time transfer for baseline CAP1-XIA6
从图6和图7看出,RTK授时结果与事后PPP时间传递结果符合较好,只在重新收敛的过程中两者差异相对较大。超短基线XIA9-XIA6两种技术结果的差异起伏范围在0.5 ns以内,STD为0.09 ns,均值为0.098 ns。XIA6和XIA9两台接收机天线相位中心修正值之差为0.026 m,换算为时间约为0.087 ns,与基线XIA9-XIA6两种技术结果差异的均值近似。RTK授时处理时没有进行接收机天线相位中心修正。推断这是造成两种技术结果有所差异的主要原因。
除部分重新收敛时段差异较大外,短基线CAP1-XIA6 RTK授时结果与事后PPP时间传递结果的差异起伏范围也在0.5 ns以内,STD为0.12 ns。
4.2 RTK授时结果与光纤双向时间传递结果比对分析
与GNSS授时相比,光纤双向时间传递精度有量级的提高,因此,将光纤双向时间传递结果作为“真值”,评价CAP1-XIA6基线RTK授时的精度。
图8展示了临潼-西安两地钟房光纤双向时间传递的结果。为了方便对比,在图8中重复给出了图3中的CAP1-XIA6基线RTK授时结果。从中可以看出,除了重新收敛的时段差异相对较大外,RTK授时结果与光纤双向时间传递结果的整体趋势相同,量级一致。
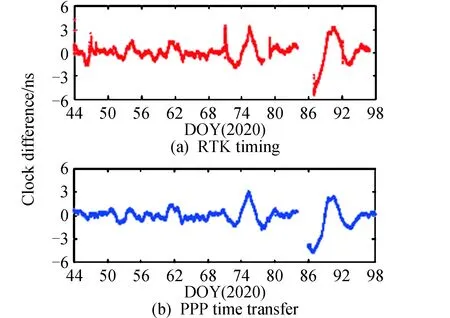
图8 CAP1-XIA6基线RTK授时(上)与光纤双向时间传递(下)时间序列图Fig.8 Time series of RTK timing and optical fiber two-way time transfer for baseline CAP1-XIA6
将重新收敛部分较大的数值结果作为异常值剔除,并且以光纤双向时间传递的结果为参考,用RTK授时结果与其相减,得到两种技术的相对钟差对比结果(如图9所示)。
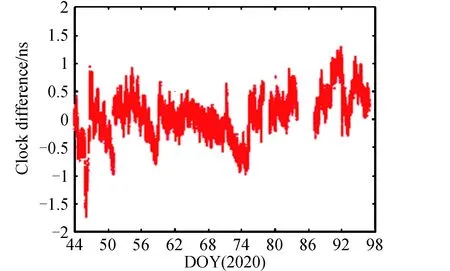
图9 CAP1-XIA6基线RTK授时与光纤双向时间传递比较结果Fig.9 Differences between RTK timing and optical fiber two-way time transfer for baseline CAP1-XIA6
从图9中可知,RTK授时与光纤双向时间传递的对比结果能够保持在±1 ns以内,该对比结果的STD为0.42 ns。需要说明的是由于终端设备分别放置于两地的钟房内,光纤双向时间传递链路与CAP1站RTK授时链路不完全吻合。如果链路完全一致,预期两种技术结果的差异STD会更小。
5 结论
为了满足短距离动、静态用户的授时需求,利用站间单差算法,借助中国科学院国家授时中心的多组实测数据开展RTK实时动态授时试验,通过理论分析与试验验证表明:
1)借助站间单差算法,RTK授时规避了对实时高精度产品的依赖,在仅借助广播星历的情况下实现亚纳秒量级授时,为开展RTK授时应用推广提供一定的参考。
2)RTK授时结果与事后PPP时间传递及光纤双向时间传递的结果符合较好,整体的互差结果均能够保持在0.5 ns范围内。
3)与PPP时间传递和光纤双向时间传递对比,RTK授时整体的标准差优于0.5 ns ,甚至可达0.2 ns左右,在一定程度上说明了RTK授时具有较高的精度。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-16
军民两用技术与产品(2022年7期)2022-08-06
测绘地理信息(2022年3期)2022-06-05
测绘地理信息(2022年2期)2022-04-02
导航定位学报(2022年1期)2022-02-17
全球定位系统(2021年2期)2021-05-24
理论与创新(2020年14期)2020-09-22
中国电气工程学报(2019年18期)2019-10-21