
内张力控制在海洋科考牵引式绞车上的应用
2021-12-27 01:56段裘佳吴金奎何阳生潘国新
设备管理与维修 2021年22期
曹 铭,段裘佳,吴金奎,何阳生,潘国新
(广州鸿海海洋专用设备有限公司,广东广州 511493)
0 引言
目前海洋科考绞车分为直拉式和牵引式结构,这两种绞车主要以是否配置牵引装置来进行区分:直拉式绞车对使用环场合有一定的要求,受到海洋与船舶影响,终端状况很容易直接反馈到直拉式绞车的滚筒上,会导致排缆张力的不断变化,影响缆绳在滚筒上的排缆,容易发生意外情况;对于大深度、大负载的海洋科考情况,牵引式绞车在海洋科考市场应用较为广泛,外界的影响通过牵引器进行物理隔离,保证滚筒和牵引器之间的张力处于设定值范围内,缆绳能稳定的缠绕在滚筒上。但是,牵引式绞车存在滚筒和牵引器两个不同惯性单元,如何保证不同惯性单元的同步驱动是必须要解决的问题,不然会发生缆绳在滚筒与牵引器之间被拉断,或者缆绳在牵引器两个轮槽之间打滑。
1 海洋科考牵引式绞车布局介绍
牵引式绞车的整体结构如图1所示,主要由五大部件组成:①由变频电机驱动的滚筒是储缆的主要部件,工作的缆绳都会储存在该机构上;②由变频电机驱动的排缆器是缆绳排缆的执行部件,排缆器根据程序在滚筒左右移动,控制缆绳在滚筒上的排布;③松弛补偿器是补偿内张力的部件,保证滚筒和牵引器之间的张力在设定的范围内;④由两台变频电机驱动的牵引器提供设备收放的拉力和速度,决定着绞车的运动参数指标;⑤外部滑轮是提供缆绳走向的部件,改变缆的方向。

图1 海洋科考牵引式绞车布局
由于储缆电滚筒和牵引机构属于两个不同质量的设备,在启动、停止和运行中,会经常发生速度不匹配的情况,进而导致储缆电滚筒和牵引机构之间的缆绳会被拉断,也可能导致缆绳无法按照恒定的张力排列在滚筒上。因此,牵引式绞车能否正常工作,如何防止储缆电滚筒和牵引机构之间的缆绳速度适配性是需要解决的首要问题。为了匹配不同惯性量的速度,绞车有速度控制和张力控制两种模式。对于储缆电滚筒和牵引机构之间,速度控制以控制电机的转速为目的,此时电机的力矩必须为保持该速度而调整,这种情况很容易让两个设备之间缆绳因为要匹配速度导致被拉断。张力控制是指变频器以控制电机的输出力矩为目的,速度大小和外部负载有关,与转矩无关。滚筒的电机与牵引器上的一个电机实现转矩匹配,牵引器上另外一个电机和负载之间形成转速控制。因此,在设计的新型牵引式绞车中,滚筒和牵引器之间会采用张力控制,并且在两个设备之间加上缓冲设备,配置张力检测元件,通过PLC逻辑运算保证两者之间的张力恒定在某个区间,避免缆绳拉断,保证在滚筒上排缆顺畅。
2 绞车的内张力控制系统设计应用
张力控制系统,可分为直接张力控制和间接张力控制系统。直接张力控制系统需要配置张力传感器,其输出信号作为张力实际值反馈到张力调节器输入端,再以张力调节器的输出作为电机转矩设定值,并通过闭环控制保持张力恒定。而间接张力控制系统不配置张力传感器,根据系统设定的张力值计算电机转矩给定值,通过转矩来控制张力。间接张力控制方法属于张力的开环控制,控制精度不高,对于动态干扰及调节能力都较差。因此新绞车的设计采用直接张力控制方式。
控制系统采用常规的PID(Proportional-Integral-Derivative,比例-积分-微分)控制,通过比例、积分和微分控制,该控制系统d参数可调,通过一定的线性组合,完成对系统的控制。其经验公式为:

式中,e(t)为给定值与输出值的偏差值,K为比例常数,T为时间常数。Kp的增大会加快系统的响应速度,但是可能会导致系统超调变大,出现振荡;积分系数使系统消除稳态误差,提高无差度,过大或过小都会影响到系统的稳定时间;微分可以改善系统的动态性能,过大或者过小对系统的抗干扰性都有很大的影响。
当牵引器运行时,牵引电机速度不断变化会导致滚筒和牵引器的之间张力也在不停变化。对于两个不同惯性量的滚筒和牵引器,滚筒无法做到实时跟踪调整,需要通过两者之间的松弛补偿器进行动态调整。
在控制界面上输入压力范围值,绞车液压系统的比例溢流阀不断调整阀口开度,松弛补偿器上的单作用液压油缸不断进行行程调节,实时匹配控制界面上设定的压力值,将其两者间的内张力稳定在设定的范围,达到缆绳在滚筒上顺畅紧密的排列。同时,单作用液压油缸的行程传感器可以反馈给操作人员,使操作人员从控制界面上了解松弛补偿器的位置信息。系统将排缆器上轴销张力传感器产生的张力信号与松弛补偿器上的张力设定值进行比较运算,将运算的结果传给PID控制器,通过PLC转换的结果作为变频器的给定输入值来控制电机转矩,从而使牵引绞车内张力得到控制,其逻辑框图如图2所示。
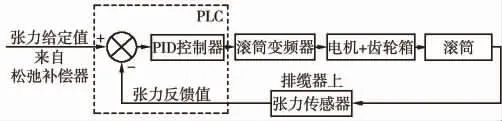
图2 张力PID控制逻辑
3 总结
海洋科考牵引式绞车的速度与张力是两大重要控制参数指标,其中以张力控制为最重要的核心控制元素。采用直接张力闭环控制方式和PID控制对滚筒与牵引器之间张力进行控制,并安装松弛补偿器进行动态调整,能够很好地解决内张力稳定的问题,也能让缆能够顺畅紧密的排列在滚筒上。常规PID控制器虽然结构简单,动态响应效果好,但是对于被控制参数变化较为敏感,只要系统参数发生变化,就需要重新整定参数,否则会影响控制效果。在新的控制系统中可采用模糊PID控制方式进行张力控制,在抗干扰和解耦方面比常规PID控制器效果好,具有较强的鲁棒性(Robust)。本系统为今后新的设计提供了借鉴和指导作用,具有一定的参考价值。
猜你喜欢
机械工程师(2022年7期)2022-07-15
导弹与航天运载技术(2022年2期)2022-05-09
湖南电力(2021年4期)2021-11-05
航空学报(2021年9期)2021-10-20
船舶标准化工程师(2020年5期)2020-10-17
昆钢科技(2020年6期)2020-03-29
上海海事大学学报(2019年4期)2019-12-30
中国港湾建设(2017年11期)2017-12-19
电子制作(2017年2期)2017-05-17
科技与企业(2015年18期)2015-10-21
