
基于信息融合的驾驶辅助模块标定集成工位开发
2022-01-18 12:06汤天殷高旭峰王天军李峰
汽车实用技术 2021年24期
汤天殷,高旭峰,王天军,李峰
基于信息融合的驾驶辅助模块标定集成工位开发
汤天殷,高旭峰,王天军,李峰
(上汽通用汽车有限公司,上海 201206)
驾驶辅助模块作为实现车辆驾驶辅助乃至自动驾驶的重要组成部分,其探测的精度和准确度,将会直接影响驾驶辅助功能的性能和客户满意度。因此,需要对驾驶辅助模块在车辆下线后进行标定。为了满足各种模块不同的标定需求,以及标定过程中车辆、模块、设备和环境状态的要求,文章结合信息融合技术,开发了一种能够适应多种驾驶辅助模块标定的集成工位(设备)。其中,根据探测信息的特殊性,设计了部分数据在数据分析层进行预融合的混合架构,实现了快速、准确完成各模块标定的目标。
驾驶辅助模块;信息融合;下线标定;集成工位
引言
随着自动驾驶概念的市场号召力逐步提升,越来越多的汽车公司将驾驶辅助作为新产品的卖点吸引消费者。要实现驾驶辅助,就离不开车载驾驶辅助模块(车载雷达、摄像头、夜视仪等)对车辆所在环境的探测。不同的驾驶辅助模块采用不同的探测方法,对车辆周边环境进行探测,以供负责集成的ECU进行计算分析,并作出响应。随着驾驶辅助模块的增多,以及其功能从给客户提示发展成为自主执行应对,驾驶辅助模块的精度和准确性将会直接影响到驾驶辅助的性能和客户的满意度。因此,这些模块的标定也就成为车辆下线后必须进行的工作之一。本文针对多个驾驶辅助模块的下线标定需求,结合信息融合技术,开发了一种适用于多个驾驶辅助模块标定的集成工位(设备)。
1 ADAS功能及其模块的标定需求
1.1 ADAS技术
ADAS技术,即先进汽车辅助驾驶系统(Advanced Driving Assistance System),是指通过安装在车辆上的各种驾驶辅助模块(传感器),对不同方向、不同距离、不同速度的车辆周边人、车、道路环境及障碍物进行识别,并利用这些数据进行计算与分析,辅助驾驶人员进行决策与操作的系统[1]。
车辆的ADAS系统可以分为三个部分[1],即感知层,决策层和执行层。感知层,即本文主要讨论的诸如雷达、摄像头等传感器模块,主要负责ADAS系统中车辆所处环境的信息收集工作。决策层,是指针对收集到信息进行计算分析,并根据设定的程序规则进行决策的部分。决策层的计算工作通常由车辆ECU承担。执行层,即是根据决策层发出的指令,进行具体动作执行的机构,例如制动系统,转向系统,仪表板声光等等。如果把ADAS系统比作一个人,那么感知层就是“眼睛”,决策层就是“大脑”,而执行层就是人的“手”和“脚”。若要完成一项工作,离不开三者间的配合。
1.2 ADAS模块及其下线标定需求
ADAS技术是一个复杂的多学科集成系统。其中,作为“眼睛”的传感器模块,负责正确、及时地将车辆周边的信息发送给“大脑”以供决策。因此,传感器模块的探测准确性,就直接影响了整个ADAS系统的工作。
由于这些模块是通过各种不同的结构被安装在车辆上,而车辆相关的设计尺寸链也较为复杂。因此,需要在安装完成后有一个标定的过程,才能确认模块相对于车辆参考坐标系的位置姿态。标定的主要目的是为了找到模块自身探测坐标系与车辆参考坐标系之间的转换关系,以提高获取信息的精确度。
下面简单介绍目前主流的ADAS模块及其标定的需求:
(1)车载毫米波雷达。
作为最为常见的驾驶辅助传感器模块,毫米波雷达探测距离较远,有较强的适应性并具有一定的精度。由于它具有尺寸小、结构简单的优势[2],目前在高端车型中已有大量的使用。毫米波雷达的下线标定,主要采用专用的雷达波反射板作为基准目标,通过主动或被动地调整自身姿态,获取反射信号,并以此调整自身的探测坐标系[3]。
(2)车载前摄像头。
车载前摄像头,是通过视频图像的捕捉与分析,探测前方车道线、车辆或障碍物的模块。前摄像头由于其成本较低和实现功能较多的特点,成为使用最广泛的ADAS模块[4]。前摄像头的标定,主要采用了二维图像的捕捉方式,采用基准位置的黑白块作为目标进行姿态的纠正。
(3)红外夜视仪。
红外夜视仪最初是从军事与航海引入到车载驾驶辅助领域的。在恶劣天气下,红外夜视仪具有更远的识别距离,更精准的识别能力,尤其是对移动的人或动物,有很好的适应性[5]。夜视仪的标定,采用了发热电阻丝在特定温度下组成的特殊图案作为基准目标来识别自身的姿态。
(4)抬头显示HUD。
抬头显示HUD模块严格意义上并非“感知层”的传感器模块,而是将“决策”信息,连同车速、转速和导航等进行显示。随着HUD图像成像深度的加深,范围的扩大,以及图像更加精细,就需要对HUD的成像位置进行标定[6]。这种标定过程采用了模拟人眼的摄像机伸入驾驶室,对HUD成像进行捕捉并进行调整。
2 基于信息融合的集成标定工位开发架构
2.1 信息融合技术
信息融合技术,又称为多传感器信息融合,是对来自多个传感器的多种信息源在特定的融合规则下进行综合分析,从而进行决策处理的一种技术。其中,多传感器是硬件基础,信息的融合是手段,而综合优化处理则是目的[7]。
从信息融合层次的角度,可以将信息融合的结构分为数据级、特征级和决策级[8]。不同层级数据融合是根据不同需求所决定的。虽然越高层级的融合具有更高的灵活性,但是其复杂性也会相应提高,同时处理效率可能会有所降低。
2.2 基于信息融合的集成标定工位开发的架构
针对驾驶辅助模块标定过程中车辆定位、状态诊断、环境探测等要求,本文采用了特征级和决策级相混合的复合结构,作为集成标定工位的开发架构。

图1 基于信息融合的集成标定工位开发架构
从图1中可以看到,参考信息融合的传统分层方法[9],开发架构可分为四个层级:信息收集层、数据分析层、决策层和执行层。其中,依靠不同的传感器,信息收集层承担了对探测对象的信息收集工作。数据分析层,则是对传感器获得的数据,根据需求进行融合预处理,或者单独进行处理,提供给上一层。而决策层所需承担的是综合数据层融合后或单独处理后的决策依据,根据一定的规则进行决策。执行层,包括了不同的执行器,在决策层的指令下执行相关的操作。
信息融合技术,在整个集成工位的开发中,嵌入到了数据分析层与决策层。对于那些探测对象明确,存在简单相互关联的数据,在数据分析层即进行数据的融合预处理,提取其中的特征。这种预融合的方式,有助于加快决策效率。对于较为独立的信息数据,架构中直接将其输入到决策层,有助于降低系统整体的复杂程度。
3 集成标定工位的开发
3.1 集成标定工位的标定条件
由于车辆的ADAS功能大都是以组合形式出现,所以一辆下线车辆往往需要同时进行雷达、摄像头、夜视仪和HUD多个模块的标定。因此,集成标定工位需要根据各个模块的标定条件,并行或串行进行标定。
集成标定工位的标定条件分为三个部分:车辆位置姿态、模块状态,设备状态和环境状态。
在驾驶辅助模块标定前,需要准确获取车辆相对于工位设备的位置与姿态。车辆位置姿态,是指车辆在集成工位上所处的位置、对中度,以及车辆悬架高度所表现出来的车身高度、俯仰角等参数。车辆需要在集成工位上进行较为严格的对中,需要对车辆四轮的向、向进行探测,并计算车辆的对称角。而由于每辆车悬架高度的不同,需要特别采用传感器对车辆前后轮眉高度进行检测,以此确定车身前后的向高度,并计算车辆的俯仰角。结合标定过程中获取的模块相对于设备(标定目标)的位置姿态,就能够获取模块坐标系与车辆坐标系的转换关系。
车辆状态,即通过车辆OBD端口,检测确认需要标定的模块及其相关模块的运行状态,以及车辆的运行状态。在进行标定之前以及标定过程中,需要实时监控并确认车辆及模块的状态是否满足标定的要求,是否存在故障等。同时,标定的指令以及标定结果的确认也是通过OBD诊断口获取的。
标定过程中的设备状态是指设备各部件是否存在故障,各部件是否根据要求移动到了指定位置(包括保持姿态)。在设备的设计过程中,需要设计添加许多的传感器,用以判断设备的状态并进行故障报警或提示。例如,雷达标定板是否到位、HUD标定幕布是否降下、是否有人员或物体遮挡了标定目标等。当设备确认其状态满足要求后,才会向模块发送标定的指令。
同样的,标定过程中标定目标与车辆间的空间是否有遮挡、是否有强光干扰等周边环境状态,也需要通过设计特定的传感器用以探测,以便消除不利的环境因素对标定结果的影响。比如根据对背景光照的测量,标定目标(如黑白灯箱)应能够对自身发光强度进行调整,达到明暗边界清晰的最佳状态。
3.2 标定工位信息融合的方式
基于以上的集成标定工位条件,需要在标定工位的具体架构中,设计多种传感器并对信息进行数据分析层的融合或决策层的融合。其中,车辆位置姿态和设备状态的信息收集,由于其数据融合规则较为固定,因此在数据分析层进行融合。而不同车型的车辆状态判断不尽相同,更需要相对柔性的设计,故将车辆状态直接在决策层加入到总体判断中。环境状态由于涉及到周边工位环境的变化,以及所需判断的信息较少,同样将其融合到决策层。
在数据分析层进行的车辆位置姿态特征提取和预融合,可以采用诸如神经网络算法等具有自适应能力的特征捕捉方法,对车轮的向和向的位置进行提取,形成车辆在工位上的前后、左右,以及相对于工位中心线的偏转角。
3.3 集成标定工位的设计结构
综上分析,基于信息融合的ADAS模块集成标定工位的设计结构见图2。在信息收集层,通过大量有针对性的传感器,收集车辆、模块、设备、环境的状态,转换为数据后在数据分析层进行数据预融合处理(车辆与设备状态)或单独处理提取特征(模块与环境状态)。而后,融合已经进行过预融合以及单独处理的信息,在决策层进行融合决策,并由决策层下发指令到执行层的伺服、气缸、机器人等执行机构。
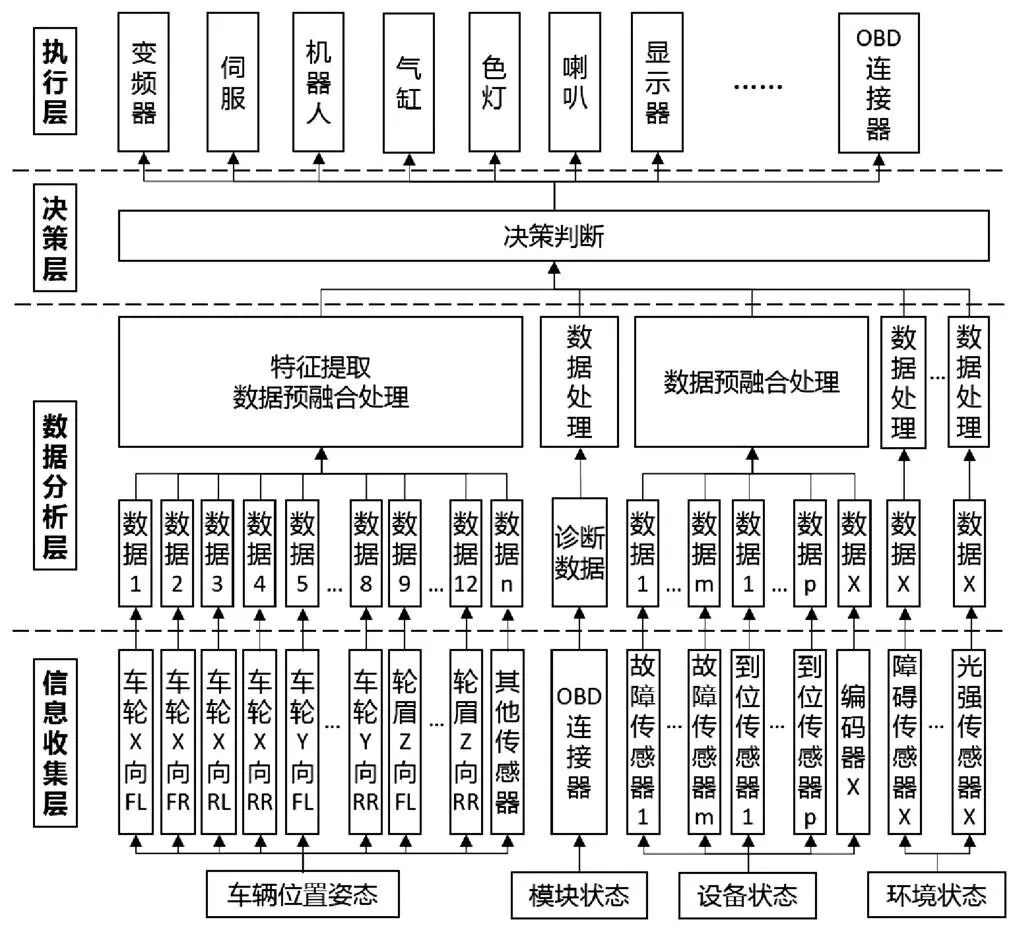
图2 集成标定工位的设计结构
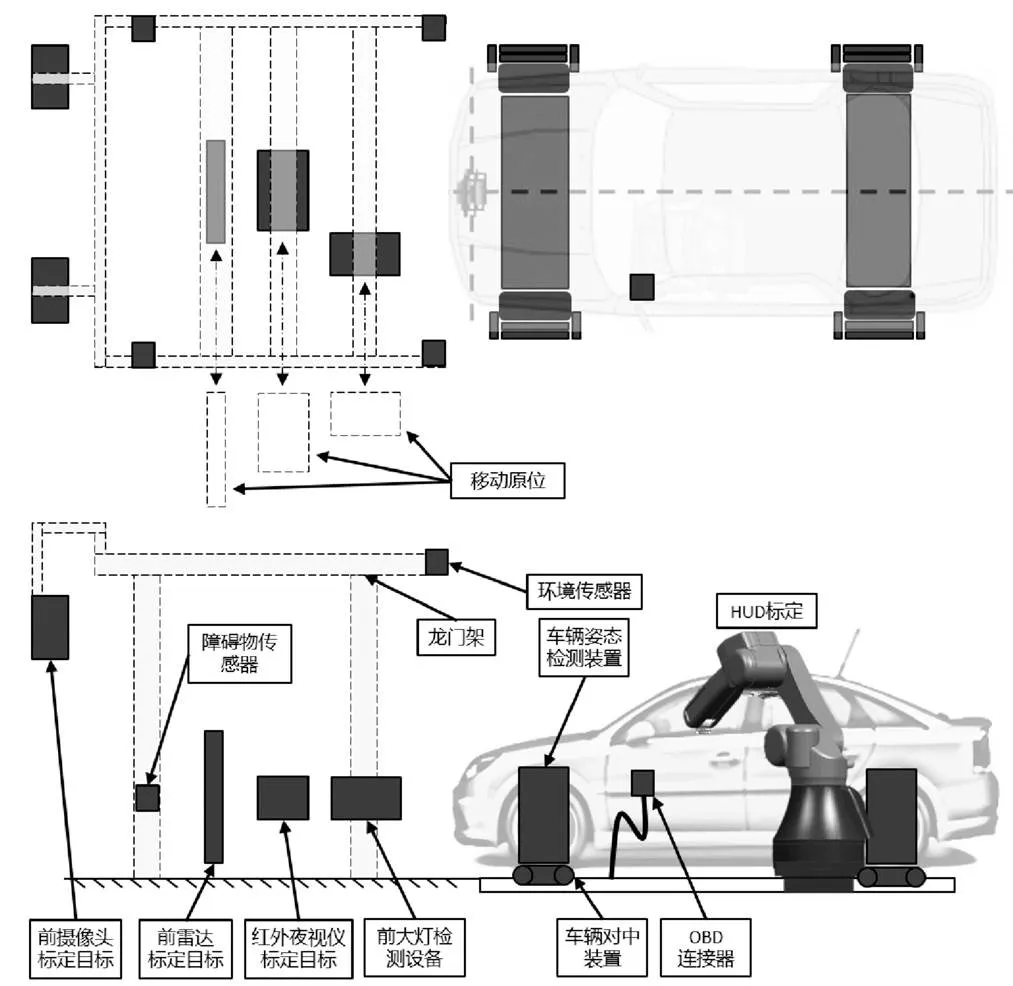
图3 集成标定工位的示意图
根据以上的系统设计结构,最终设计形成了如图3所示驾驶辅助模块集成标定工位。其中,多种驾驶辅助模块的标定机构被安装在车辆前方的龙门架上。对于标定位置阻挡车辆驶出的标定目标,需要设计相应的移动机构。当其处于移动原位时,通过色灯提示操作人员并允许车辆驶出。
4 结论
本文从驾驶辅助模块及其标定需求入手,结合信息融合技术的理论框架,将驾驶辅助模块标定集成工位架构分为信息收集层、数据分析层、决策层和执行层,并根据车辆、模块、设备、环境状态的特殊性,设计了部分在数据分析层进行预融合的分层融合机制。根据这一设计结构开发的驾驶辅助模块集成标定工位,能够准确、快速地进行多模块串、并行标定工艺,同时对未来可能增加的新模块标定需求预留了可拓展性。
[1] 张志强.ADAS的发展历程及趋势[J].内燃机与配件,2019,(1):80-82.
[2] 于渊,郑银香,赵成林,等.车载毫米波雷达目标检测与定位技术研究[J].移动通信,2019,43(11):21-27+35.
[3] 程金龙,冯莹,曹毓,等.车载激光雷达外参数的标定方法[J].光电工程,2013,(012):89-94.
[4] 崔洪柳.基于车道线检测的车载摄像机在线标定算法[D].沈阳:东北大学,2015.
[5] 石永彪,张湧.车载红外夜视技术发展研究综述[J].红外技术,2019, 41(6):504-510.
[6] 安喆,徐熙平,杨进华,等.光学透射式AR-HUD系统的标定方法研究[J].光子学报,2019,48(4):120-131.
[7] 杨世雄.基于信息融合的柴油机热工故障诊断技术研究[D].大连:大连海事大学,2019.
[8] 袁野.基于多源信息融合的设备关键部件状态评估研究[D].重庆:重庆大学,2018.
[9] 李洋,赵鸣,徐梦瑶,等.多源信息融合技术研究综述[J].智能计算机与应用,2019,9(5):186-189.
Development of Calibration Station of ADAS Module Based on Information Fusion
TANG Tianyin, GAO Xufeng, WANG Tianjun, LI Feng
( SAIC General Motors Co., Ltd., Shanghai 201206 )
The detection accuracy of ADAS module, as important parts of vehicle ADAS function and even automatic driving, will directly affect the performance and customer satisfaction. Therefore, it is necessary to calibrate the ADAS module in the end of line. In order to meet the different calibration requirements of various modules, as well as the status of vehicle, module, equipment and environment during the calibration process, an integrated station (equipment) is developed which can adapt to the calibration of various ADAS modules in combination with information fusion technology. According to the particularity of the detection information, a hybrid architecture is designed to pre-fuse a part of the data in the data analysis layer, which can complete the calibration of each module quickly and accurately.
ADAS module; Information fusion; End of line calibration; Integration station
U495
A
1671-7988(2021)24-34-04
U495
A
1671-7988(2021)24-34-04
10.16638/j.cnki.1671-7988.2021.024.008
汤天殷,工学硕士,现任上汽通用汽车整车制造工程部终检线技术经理,主要负责新产品、工厂项目终检线工艺、设备开发和研究工作。
猜你喜欢
汽车实用技术(2022年9期)2022-05-20
数字技术与应用(2022年3期)2022-04-14
汽车电器(2021年7期)2021-08-04
汽车实用技术(2020年15期)2020-10-20
意林(2020年10期)2020-06-01
财讯(2019年24期)2019-09-03
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
新课程·中旬(2017年7期)2017-08-13
企业导报(2015年6期)2015-04-27
