基于机器视觉的磁悬浮气隙检测方法*
2022-01-19 09:57张伟蒋庆楠季晨光杨健
煤矿机电 2021年6期
张伟,蒋庆楠,季晨光,杨健
(安徽理工大学 机械工程学院, 安徽 淮南 232001)
0 引言
由于磁悬浮具有结构简单,运动精度高,无接触,无摩擦消耗等优点,得到了较好的工程应用。
目前对磁悬浮系统气隙的检测主要采用电感式传感器、霍尔传感器、电涡流位移传感器、电容式传感器和光电传感器。由于传感器式检测存在需要固定安装位置,体积大、效果不理想等缺点。文献[1]基于隧道型磁阻(TMR)传感器阵列的气隙磁场检测方案,采用体积小、灵敏度高、测量精度高的(TMR)传感器作为磁传感元件,同时在气隙磁场中进行传感器的多点布控,利用传感器阵列来检测气隙磁场的分布,该方案经测试取得较好结果。文献[2]提出高速磁悬浮列车中气隙磁场的分布和变化规律对列车的悬浮系统、导向系统、推进系统的设计和控制以及改进、优化列车参数有着重要的指导意义。因此需要对磁悬浮系统气隙的检测问题进一步深入研究。
随着计算机技术以及图像处理技术的飞速发展,计算机视觉检测成为一种可靠的非接触测量手段,机器视觉就是用相机成像代替人眼获取到目标对象的图像信息,通过图像处理系统将图像里各个信号转化为数字信号,分析目标特征数据,根据所获得的结果与现场设备联动控制,达到目标检测。
本文提出基于机器视觉来检测电磁混合悬浮装置的悬浮间隙方法。而悬浮的状态稳定性不仅是电磁混合悬浮的基本要求,也是视觉检测的前提。机器视觉具有非接触、效率高、成本比较低、检测精度较高等优点,并且有着安全性与操作简便性的优势,采用相机和图像处理软件对磁悬浮间隙进行快速和较高精准测量[3-5]。对此为了实现检测磁悬浮气隙的可能性,通过实验对具体的电磁混合磁悬浮模型装置进行悬浮气隙视觉检测,将视觉检测采集的图像进行预处理,通过高斯滤波、图像锐化、以及感兴趣区域提取实现图像的实时检测。在这基础上采用Canny算子检测边缘和最小二乘法直线的拟合。并进一步计算悬浮气隙[6-7]。
1 视觉检测系统
在基于机器视觉检测的磁电混合悬浮装置中,硬件构成主要由摄相机、计算机、磁悬浮装置(浮子,电磁铁圈)、LED光源组成[8]。在该磁悬浮装置中的电磁铁以磁极同性相斥原理使得永磁体产生纵向磁斥力,并通过引入电流产生电磁力平衡横向位移,进而使得浮子悬浮。由于磁电混合悬浮装置的悬浮是个动态过程,所以本系统检测的是悬浮稳定之后的状态,进行视觉测量浮子与线圈之间的距离y。本文磁电混合悬浮装置的检测原理如图1所示。
2 视觉测量系统
2.1 图像的采集和预处理
在图像的采集过程之中,会受到各种噪声因素的影响,其中包括了环境因素、人为处理过程和机器本身等因素,不可避免会对采集后的图像质量造成噪声的干扰,图像中的噪声会干扰采集图像中的目标识别和边缘的精准定位,为了方便从采集后的图像中提取真实有用的信息,因此需要通过滤波的方法对采集后的图像进行去噪处理,其流程如图2所示。

图1 磁电混合装置系统工作原理

图2 图像处理流程
首先需要将采集之后的图像进行灰度化处理,转换后的灰度图像如图3所示。灰度图像的公式:
Gray=0.299R+0.587G+0.114B
(1)

图3 灰度图像
图像滤波算法的效果对后续边缘检测起着重要作用,在处理图像噪声和边缘检测精度之间平衡,常用的滤波有中值滤波、均值滤波、高斯滤波、双边滤波等。本系统采用了高斯滤波对图像进行去噪处理。高斯滤波平滑处理去噪的原理:高斯滤波是根据高斯函数对图像矩阵的每一点进行加权求和,每个像素点的值都由其和领域内的其他像素值经过加权求和后得到[9]。这样可以有效地滤去采集图像的噪声。其中一维高斯滤波函数表达式为:
G0(x)=exp[-x2/(2σ2)]
(2)
式中:σ为高斯函数的方差;x为输入一维图像的像素坐标。
2.2 图像的锐化处理
图像经过高斯滤波处理之后,由于物体边缘和轮廓会出现模糊的现象,为了解决这类影响,所以需要对图像进行锐化处理,以增强图像细节边缘、轮廓,使图像的细节变得清晰。方便后期目标的检测和处理。锐化方法主要有两大类,分别是空域微分法和高通滤波。
本文采用拉普拉斯算子进行图像的边缘锐化处理,拉普拉斯算子是由二阶导数演变而来,二阶导数表示为:
(3)
在数字图像处理过程中,用差分来代替微分使得计算更加方便简洁。
(4)
(5)
拉普拉斯算子表达式:
∇2f=f(x+1,y)+f(x-1,y)+
f(x,y+1)+f(x,y-1)-4f(x,y)
(6)
g(x,y)=f(x,y)+c[∇2f(x,y)]>
(7)
图4为锐化后的图像,图5为高斯滤波图像。

图4 锐化后的图像

图5 高斯滤波图像
2.3 感兴趣区域
感兴趣区域ROI是从图像中选择一个图像区域作为研究对象,从锐化后的磁悬浮图像中选择要研究感兴趣的区域,将需要处理的图像由大变小进行细化处理,减少了图像处理时间。所形成的区域为感兴趣区域如图6所示。

图6 感兴趣区域示意图
2.4 图像边缘检测
在图像边缘检测过程中,采用Canny算法对所测量的物体进行边缘化提取[10-12]。Canny算子检测感光轮廓如图7所示,步骤如下:
1) 高斯滤波。使用指定标准差σ的一个高斯滤波器来平滑图像,其中x,y分别是图像横坐标和纵坐标。
二维高斯滤波的表达式为:
(8)
对原灰度图像f(x,y)进行高斯平滑处理,得到二维高斯滤波后的图像g(x,y),表达式如下:
g(x,y)=G(x,y,σ)*f(x,y)
(9)
上式中*表示卷积,将G(x,y,σ)转化为一个二维模板,用于对图像进行卷积运算。
2) 通过一阶偏导的有限差分进行梯度幅值和方向的计算,常用sobel算子水平和垂直算子与输入图像卷积计算dx,dy。
(10)
(11)
dx=f(x,y)*sobelx(x,y)
(12)
dy=f(x,y)*sobely(x,y)
(13)
进一步可以得到图像梯度的幅值大小:
(14)
最大变化率发生的角度表达公式为:
θm=arctan(dy/dx)
(15)
3) 对梯度方向幅值进行非极大值抑制,幅值M(x,y)值越大,其对应的梯度值也会越大,为了确定边缘,必须细化幅值的边缘点产生梯度中的脊线,沿着这些脊线的顶部进行跟踪,并将实际上不在脊线顶部的像素设置为零,在输出中给出一条细线[11]。然后在用滞后阈值的方法来对这些脊线像素进行阈值处理,产生两个阈值T1和T2,T1为低阈值量,T2为高阈值量。
4) 运用双阈值算法检测和连接边缘。通过八连接的弱像素集成到强像素来执行边缘连接。

图7 Canny算子检测感兴趣轮廓
2.5 最小二乘法拟合直线
计算A,B的尺寸时,采用最小二乘法进行直线拟合,然后进行几何尺寸参数的测量[13]。假设图像经过边缘提取得到A或B边点集为
I={(x1,y1),…,(xi,yi),…,(xn,yn)}
其中(xi,yi)为图像中像素点横坐标,n为像素点个数。拟合的边缘直线方程为:
f=kx+b
(16)
设参与直线拟合的像素点为n,第i个像素点的坐标为(xi,yi),最小二乘目标函数表达式为:
(17)
由极值条件可得:
(18)
(19)
即:
(20)
(21)
求出参数k和b的值。
当直线与y轴平行时候,拟合直线的方程为:x=a,则最小二乘法的目标函数表达式为:
(22)
极值条件为:
(23)
拟合之后测量A、B两点之间气隙图像,轮廓如图8所示。

图8 拟合后的轮廓
3 电磁混合磁悬浮动态特性
针对电磁混合磁悬浮系统,本文通过搭建磁悬浮简易平台,并通过模糊PID控制方案来实现稳定悬浮。如图9所示,下方为电磁铁芯,上方为浮子,通电以后,电磁铁芯(xi,yi) 就会对上方的浮子产生电磁斥力作用,使得浮子稳定悬浮。

图9 电磁混合磁悬浮系统的组成
3.1 动力学方程
浮子在悬浮过程中受自身重力mg和电磁斥力F(y,i)的作用,忽略其他情况下的干扰作用,根据牛顿定律可得出:
(24)
式中:M为悬浮小球的质量,kg;y为浮子下表面到电磁线圈上表面的气隙,mm;F(y,i)为电磁线圈产生的吸力,N;g为重力加速度,m/s2。
电磁力学方程:
(25)
式中:K为电磁线圈的互感。
电学方程:
(26)
式中:L1为静态电感;R为有效磁阻。
3.2 磁悬浮系统的模糊PID控制
模糊PID控制器系统结构如图10所示,主要由参数可调的PID控制器和模糊控制器构成,引入模糊PID的目的就是通过在每个采样时刻检测系统的偏差信号E和偏差信号变化率EC的大小,根据模糊规则自动在线调整PID 3个参数的值,使系统达到更好的控制效果[14]。

图10 模糊 PID控制系统的基本结构
选取磁悬浮系统偏差e和偏差变化率ec为模糊控制器的输入变量,输出量为PID 3个控制参数的修正量Δkp、Δkd、Δki。确定隶属度函数类型为三角隶属函数,并结合工程人员的技术知识经验设计模糊规则表。根据表中规则,在模糊控制器中添加模糊控制规则。它们之间的语言变量、基本论域、模糊子集、模糊论域和量化因子关系如表1所示。

表1 模糊PID参数
3.3 仿真验证
基于MATLAB/Simulink建立的电磁混合磁悬浮模糊PID控制系统的仿真程序如图11所示,系统仿真结果如图12所示,将之前图像采集的数据拟合成一个多阶方程,再将拟合的多阶方程融合于模糊PID控制中。设定初始时间t=0.3 s、p=-1.5、i=-0.002、d=-0.005。通过与模糊PID仿真系统结合实现了系统稳定、快速悬浮。

图11 磁悬浮模糊PID控制系统仿真程序

图12 磁悬浮系统位置响应
4 实验验证
4.1 实验装置搭建
将模型仿真得到的数据用于实际的电磁混合磁悬浮装置中,通过机器视觉进行实时检测。图13为电磁混合悬浮装置实物图,图14为电磁混合磁悬浮结构示意图。
4.2 实验分析
实验步骤:先固定电磁混合磁悬浮装置,再改变相机与电磁混合磁悬浮装置间隔的距离进行图像采集,以40次的数据进行对比,仿真出的平均数为10.945 mm,图像采集平均数为11.128 mm,通过上述流程处理图像,再对磁悬浮气隙进行测量,测量结果与理想轨迹趋势大致吻合,测量结果如图15所示。

图13 电磁混合悬浮装置实物图
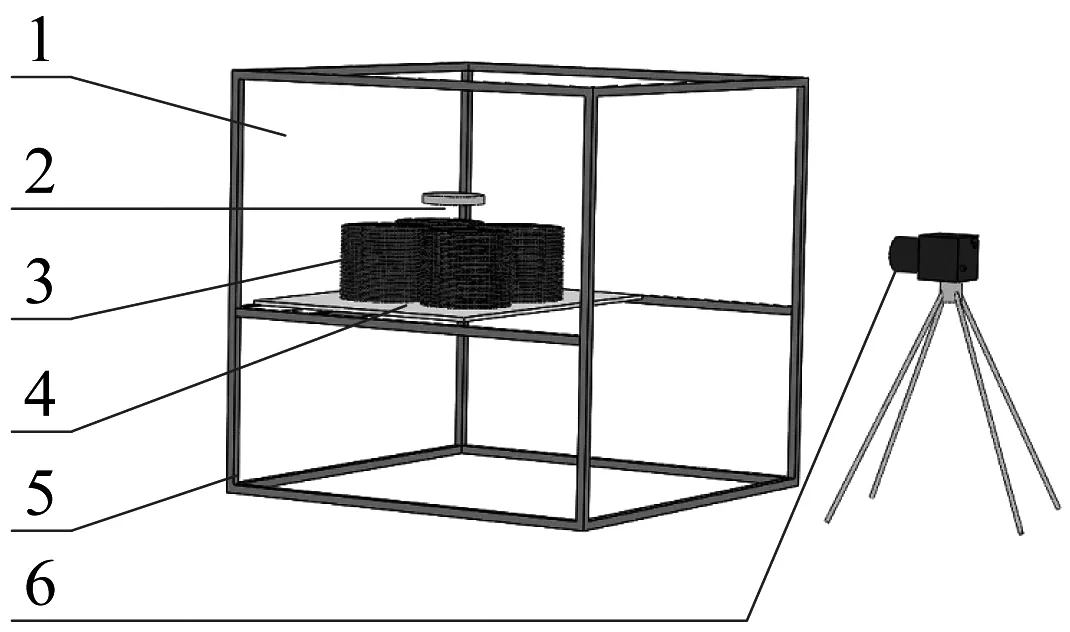
1-白墙; 2-永磁体; 3-电磁线圈; 4-控制电路板; 5-磁悬浮架子; 6-工业相机。

图15 数据值对比
5 结论
本文提出了一种基于机器视觉的磁悬浮悬浮气隙测量方法,并通过搭建实验台验证该方法的有效性,经理论分析和实验结果表明,该方法能够有效检测磁悬浮气隙,相比传统检测具有非接触、测量精准等特点,可为磁悬浮悬浮气隙检测技术研究提供一定参考。
猜你喜欢
防爆电机(2022年4期)2022-08-17
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(2021年4期)2021-06-15
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
东西南北(2018年14期)2018-10-16
时代汽车(2018年7期)2018-06-13
中国科技教育(2016年12期)2017-08-11
电影故事(2015年16期)2015-07-14
哈尔滨理工大学学报(2014年3期)2015-01-04