
基于多元探测的机载激光测距性能分析
2022-01-22 10:40郭爱雪郝培育吴兴国
电光与控制 2022年1期
郭爱雪, 郝培育, 吴兴国, 郭 赛, 赵 益
(1.光电控制技术重点实验室,河南 洛阳 471000; 2.中国航空工业集团公司洛阳电光设备研究所,河南 洛阳 471000)
0 引言
单光子测距是利用时间相关光子计数对回波光子进行叠加计数提取测距距离信息的光电探测技术,其可以将现有的机载探测距离从几十千米提高到上百千米,极大地改变了未来的空中作战方式[1-3]。为了满足机载单光子测距对灵敏度的需求,采用的探测器是盖革模式雪崩光电二极管(Geiger Mode Avalanche Photodiodes,GM-APD)。在测距过程中,探测器响应的可能是提前到达的背景噪声,而目标光子未被响应,从而限制了回波的探测概率[4],影响探测性能。针对此现象,国内外相关研究人员提出采用多元APD作为激光回波接收元件的激光测距方法[5-8]。
本文从机载的应用环境出发,提出将与测距能力直接相关的单光子探测灵敏度作为性能指标,衡量测距性能的优劣。根据目标的探测概率、虚警率以及信噪比方程[9]推导出探测灵敏度。基于建立的灵敏度模型分别讨论了在不同的背景噪声下阵列单元数、脉冲累加次数、填充因子和死时间对探测灵敏度的影响,为今后多元探测器的选型提供理论支持。
1 多元探测原理及探测灵敏度建模
1.1 多元探测原理
按功能模块划分,单光子测距系统主要由发射单元、接收单元、信号处理单元等3部分组成,如图1所示[10]。
图1 单光子激光测距系统功能组成框图Fig.1 Block diagram of composition of single photon laser ranging system
在多元单光子探测模块中,通过在多元APD感光面前放置微透镜阵列的方式,来保证回波能均匀、有效地打在光敏面上。当光子或背景噪声触发像元产生盖革雪崩后,探测器淬灭盖革模式,并在死时间后恢复盖革模式进行下一次探测,实现自由运行。信号处理单元将接收到的信息分成数份并进行单独分析,再将探测结果合并输出,从而大大减小了背景噪声光子对信号光子的淹没效应。
1.2 探测灵敏度建模
为衡量单光子测距能力,提出探测灵敏度这一概念,即灵敏度光子数nsmin,定义为满足探测概率PD和虚警率PF要求时,最小信噪比RS,N,min所对应的最小可探测光子数[11]。
1) 探测信噪比。
单光子测距采用多脉冲累加的方法进行M次累加,经N元APD接收,完成目标探测。输出信噪比(SNR)为
(1)

2) 单元探测概率。
经过M脉冲累加,回波光子到达一个单元数为N、填充因子为γ、死时间为td、门效率为up的多元APD上,则N元APD中每个单元的探测概率PZN为
PZN=e-td×(fn×γ/N×ηq×up+fd)×106×(1-e-ηq×ns×γ/N×up)。
(2)
3) 探测概率与虚警率。
单次测距时,经过多次累加后,单个距离格内噪声光子数为Nn,总的信号光子数为Ns,设置阈值为Kth,则目标的探测概率PD可以表示为
(3)
单个距离格内的虚警率PF可以表示为
(4)
因此,单次测距所有距离门中,出现虚警的概率PF为
PF=1-(1-PF)Nbin
(5)
式中,Nbin为单次测距的距离门个数[9]。
建立满足上述公式的灵敏度模型,流程见图2。
图2 单光子灵敏度仿真流程图Fig.2 Flow chart of single photon sensitivity simulation
由图2可知,输出nsmin越小,探测灵敏度越高。
2 测距性能数值仿真
本文仿真了在白天测距条件下的高背景噪声175 MHz和低背景噪声44.8 MHz,多元APD的每个单元在1064 nm的探测效率为20%,门效率为45%的条件下探测灵敏度随APD单元数的变化。
2.1 不同脉冲累加次数
仿真中设置死时间为20 ns,填充因子为0.8时累加脉冲数分别为6,30,50和100,仿真结果如表1所示。
表1 不同背景噪声不同累加脉冲数下灵敏度仿真结果Table 1 Sensitivity simulation results of different accumulated pulse times under different background noises
由表1可以看出,在高背景噪声下,探测灵敏度会随着脉冲累加次数的增加而提高,在脉冲累加次数相同时,灵敏度会随单元数的增加而提高。灵敏度最高的方案为25元APD进行100次脉冲累加测距,灵敏度光子数为3.4。据探测方程知[11],测距能力与ET/ns成正比(ET为单脉冲能量,ns为灵敏度光子数)。而在目前的仿真中,脉冲累加次数不同,单脉冲能量ET也不同。为衡量测距能力,设置单次测距中的总能量一致,求得不同单元数APD的ET/ns与脉冲累加次数的关系如表2所示。
表2 不同背景噪声下APD的ET/ns与累加脉冲数的关系Table 2 Relationship between ET/ns of APD and accumulated pulse times under different background noises
在表2中,各脉冲数下多元探测器的效果几乎均好于单元探测器。单元探测器的测距性能在30脉冲时达到峰值,而对于多元APD,在6脉冲、25元APD的测距性能较好。
在低背景噪声下,随着累加脉冲数的增加,探测灵敏度随之提高,但是增加APD单元数并没有显著提高测距能力,且测距能力随着累加脉冲数的增加而降低。
2.2 不同填充因子
不同于单元APD,多元APD每个单元之间会有一些内部的连线及相邻微元的间隙等不能响应入射的光子,将可以探测并响应光子的有效敏感区域与整个区域面积的比值称为填充因子。假设微透镜紧密排列,填充因子可以提高到78.5%[4]。如表3所示,分析了不同填充因子条件下,探测灵敏度随单元数的变化。
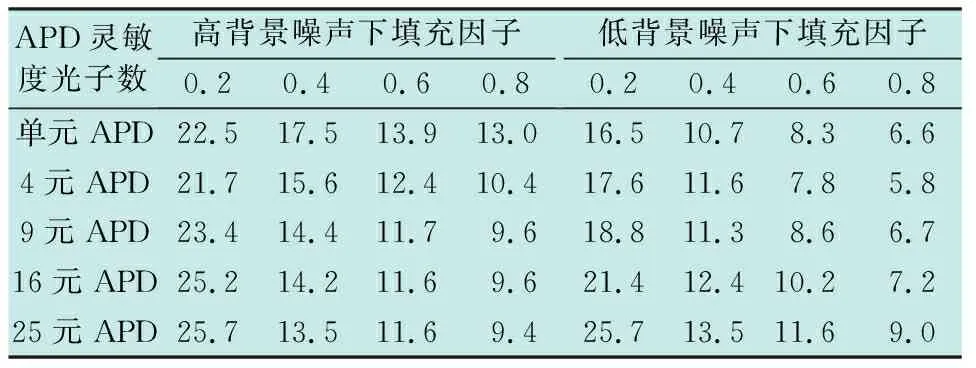
表3 不同背景噪声、不同填充因子下灵敏度仿真结果Table 3 Sensitivity simulation results of different fill factor under different background noises
由表3可以发现,在探测环境相同的情况下,填充因子越大,探测灵敏度越高。在高背景噪声下,填充因子大于0.4时,灵敏度随单元数的增加而增大,25元APD的灵敏度更高;而在低背景噪声下,探测灵敏度并不会随着单元数的增加而提高,4元APD更为合适。
2.3 不同死时间
工作在盖革模式下的探测器在触发雪崩之后,其偏置电压需要一定的时间才能恢复到初始状态,这段时间称为死时间,期间APD无法探测到其他光子。对于探测灵敏度而言,死时间有重要影响。如表4所示,分析了不同死时间下,单元数对灵敏度的影响。

表4 不同背景噪声、不同死时间下灵敏度仿真结果Table 4 Sensitivity simulation results of different dead time under different background noises
由表4可以看到,相同探测条件下,死时间越小,灵敏度越高,其中对单元APD的影响最显著。在高背景噪声下,随着死时间的增大,单元APD的探测灵敏度急剧下降,而多元APD受死时间的影响较小,充分说明了采用多元APD可以解决噪声致盲问题。随着单元数增加,灵敏度随之提高,25元APD的仿真效果最优。在低背景噪声下,增加单元数对灵敏度的影响较小,4元APD进行探测时,灵敏度就可以达到较好水平。
3 测距性能实验分析
为验证本文建立的灵敏度探测模型的准确性,根据现有实验条件选取单元APD和4元APD在白天高背景噪声条件下进行测距性能实验。
3.1 实验平台组成
实验平台包括1064 nm激光器、聚焦透镜、衰减片、多元APD、示波器和上位机,如图3所示。
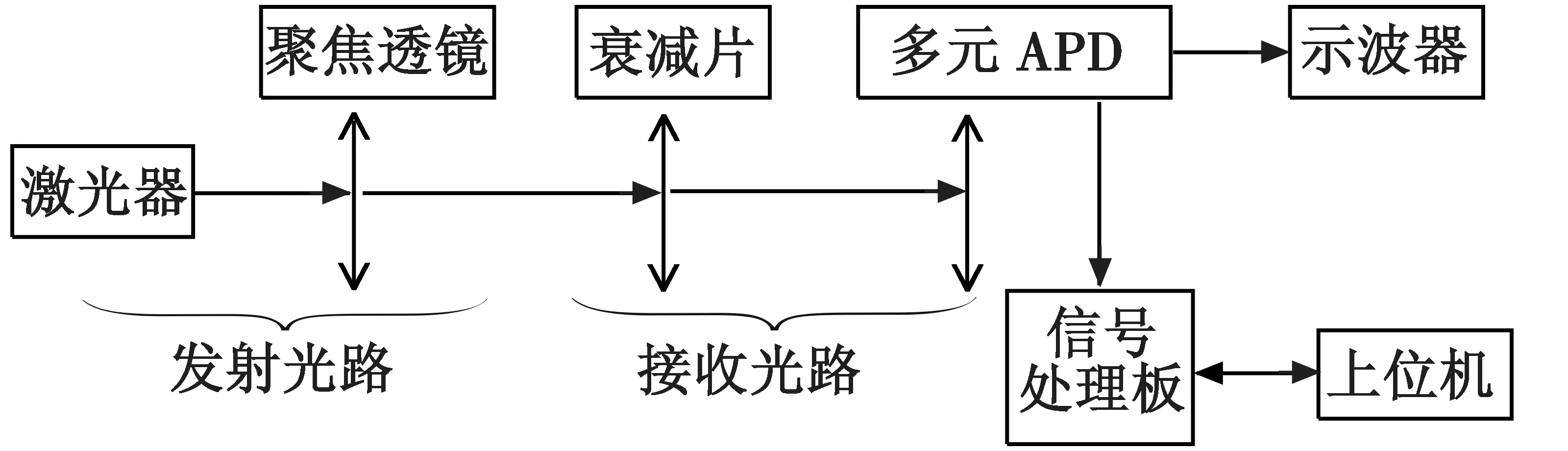
图3 实验平台组成Fig.3 Composition of experimental platform
3.2 实验结果
本次测试在测试塔上开展,采用消光比法计算等效作用距离,通过可调衰减片组和近场距离,折算远程测距能力。实验验证了单元APD和4元APD在高背景噪声条件下,当死时间为20 ns时,不同累加脉冲数的灵敏度,实验结果如表5所示。

表5 灵敏度测试实验结果Table 5 Experimental results of sensitivity test
实验结果表明,4元APD的测距能力明显优于单元APD,并且灵敏度随着累加脉冲数的增加而提高。与表1中仿真结果进行对比,显示误差很小,变化规律相同,证明了本文所建立灵敏度模型的正确性。
4 结论
本文通过建立灵敏度模型得到灵敏度光子数,对多元探测的单光子测距性能进行了分析研究。在不同背景噪声下进行仿真,得到灵敏度随单元数的变化关系,并分别针对不同累加脉冲数、不同填充因子和不同死时间等因素进行了分析。之后搭建了实验平台,对建立的灵敏度探测模型进行了实验验证,证明了灵敏度探测模型的正确性。仿真结果表明:在高背景噪声下,随着单元数的增加,发生淹没效应的概率随之减小,灵敏度提高较为显著,25元APD能获得较高的灵敏度;在低背景噪声下,并不存在严重的淹没反应,随着单元数的增加,对噪声的抑制作用不明显,还可能引入APD自身的暗噪声,灵敏度不会随之提高,4元APD的灵敏度就可以达到较好水平。另外,在累加脉冲数为6时,填充因子越大,死时间越小,测距性能最佳。本文充分分析了在不同背景噪声下,APD单元数、累加脉冲数、填充因子和死时间对探测灵敏度的影响,为接下来的多元APD的选型奠定了理论基础。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
噪声与振动控制(2022年3期)2022-07-04
地震研究(2021年1期)2021-04-13
科学导报(2020年66期)2020-11-02
科学(2020年3期)2020-01-06
地震研究(2017年3期)2017-11-06
电子制作(2017年7期)2017-06-05
发明与创新(2016年7期)2016-12-18
军民两用技术与产品(2016年3期)2016-03-26
太空探索(2014年1期)2014-07-10
