
基于机器视觉的LCD屏点缺陷检测技术研究*
2022-02-10 08:38张清蓉陈龙灿南亮生
南方农机 2022年2期
张清蓉 , 陈龙灿 , 南亮生
(重庆移通学院,重庆 401520)
组合仪表盘作为汽车的必备配件[1],主要包括单个的指针表头及LCD显示屏。其中,LCD显示屏能显示汽车车速、发动机转速等信息,它是驾驶员信息系统重要的组成部分,能够帮助驾驶员及时有效地处理各种情况。因此,仪表出厂前需要对其各项功能进行严格的检测。早期的汽车仪表盘LCD显示屏缺陷检测,主要是通过人工目测的方法实现各项检测,这种检测方法容易受到环境及人为等因素影响。将机器视觉技术应用在汽车LCD显示屏缺陷检测中,不仅可以减少人工目测检测因环境及人为因素导致的缺陷和不足,而且可以大大提高检测效率,实现系统化自动化,确保汽车运行时,仪表盘能正确显示汽车各部分的工作状态。
1 LCD显示屏的缺陷介绍
常见的LCD显示屏的缺陷主要有线缺陷、点缺陷以及Mura缺陷[2]。不同的缺陷形成原因各不相同,线缺陷属于功能性缺陷,主要是驱动功能的元器件损坏造成的,这种缺陷会导致画面显示不良。LCD显示屏缺陷类型中最常见的是点缺陷,这种缺陷是由于在生产过程中,玻璃基板的像素驱动损坏,产生像素不良或破损,在显示时就会出现点状的缺陷。点缺陷分为暗点和亮点两种,暗点是指LCD显示屏全屏显示白色时出现的黑点;亮点是指全屏为黑色时显示的白色的点。Mura缺陷是LCD显示屏上出现大面积的不规则缺陷区域。
2 图像预处理
本研究要实现对LCD显示屏的点缺陷检测,需要对采集的显示屏图像进行处理,首先必须保证图像的高质量。因此,对所获取的仪表盘图像必须做必要的预处理[3],减少或消除无用信息,确保检测结果的准确性。图像预处理的流程图如图1所示。

图1 图像预处理流程图
2.1 图像采集
图像采集需要调用OpenCV函数库中的函数,让摄像头实现抓帧处理并将采集的图像通过USB接口保存在计算机的硬盘空间[4]。完成图像的采集过程通常需要镜头、图像传感器(采集卡)、图像存储和显示器以及它们之间的传输与转换。摄像头种类繁多,最常用的是COMS摄像头与CCD摄像头,二者的成像原理大体相同。本研究采用的COMS摄像头通过USB接口与计算机直接相连,在OpenCV函数库中的函数驱动下实时采集图像并存储于计算机的硬盘空间,可以显示在计算机的屏幕上。图像采集和保存流程如图2所示。

图2 图像采集和保存流程图
2.2 图像矫正
图像矫正的目的是矫正图像失真,并补偿由相机的安装引起的定位误差[5]。摄像机获取的图片会产生畸变主要是镜头的视场角和拍摄距离引起的,由镜头引起的光学畸变包括线性和非线性两种,会影响调试和测量的性能。如果相机的安装不够准确,如相机的倾斜、平移、旋转和距离误差,会带来图像在形状、位置、方向和尺寸上的畸变,最终导致测量误差。对于成像系统的畸变、像差、拍摄姿态、光散射现象等引起的图像失真,可以通过标定摄像机的方法来进行矫正,本研究采用角点标定的方法来标定摄像头。
以下为矫正前后的图片,图3为采集到的原始图片,图4表示的是进行矫正中所找到的角点,图5为矫正后的图片。

图3 采集的原始图片
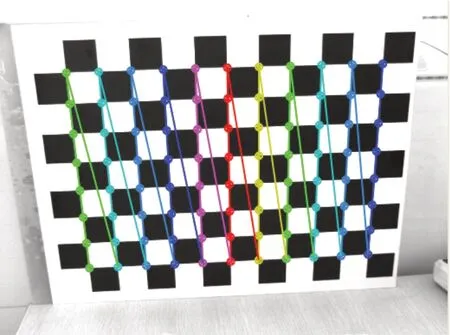
图4 获取的角点图片
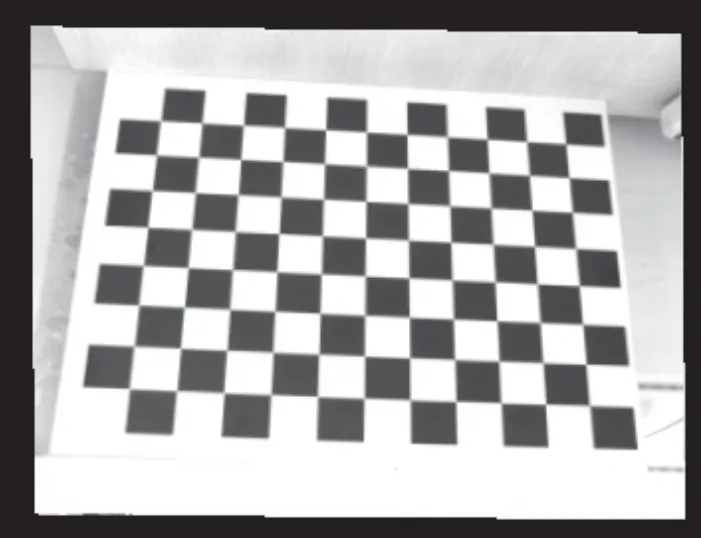
图5 矫正后的图片
2.3 ROI分割
汽车仪表盘是一种包含了多种信息的组合体,除了LCD显示屏外还有其他单个的指针仪表头、指示灯等。进行LCD显示屏点缺陷检测时,检测的目标是LCD显示屏。因此,需要在采集的完整的仪表盘图像中将LCD显示屏截取出来,截取过程被称为图像的感兴趣区域ROI(region of interest)分割。ROI分割有三种类型:矩形分割、圆形分割、椭圆形分割。三种分割方式都是通过设置分割区域大小、分割起始点坐标分别画矩形、圆形、椭圆形等形状来分割感兴趣的区域[6]。本研究根据LCD显示屏特有的矩形形状选择ROI的矩形分割,ROI分割函数为cvSetImageROI()。
2.4 图像去噪
除去图像噪声的过程也称为滤波或平滑处理[7],不同的噪声源所用的滤波方法不同。滤波分为线性滤波与非线性滤波,对于人类视觉系统还没有准确的标准,但现有的实验结果表明,视觉系统在最初阶段表现的是非线性特征。因此,在利用机器视觉技术处理图像时,非线性滤波的滤波效果较好。为了保护图像的边缘,在图像去噪过程中大多采用双边滤波,这种方法既能改善图片的质量,又能保护图像的边缘细节。由于汽车仪表盘图像是在一个封闭的测试箱体中采集的,采集过程中受到的外界噪声影响较小,采集的图片噪声较少。因此,双边滤波处理前后的图片效果差别不大。
3 LCD显示屏的点缺陷检测
本研究采用阈值分割的方法实现LCD屏点缺陷的检测,检测流程图如图6所示。

图6 LCD点缺陷检测流程图
3.1 图像分割
图像分割是指根据图像特征将其分为具有不同特性的区域并提取出感兴趣区域的过程,图像分割的方法主要包括阈值分割法、边缘检测法和区域提取法三类。本研究采用阈值分割的方法实现点缺陷的分割。
阈值分割是一种常用也是最简单的分割方法[8],主要有两个步骤:第一步是确定需要的分割阈值,第二步是将分割阈值与像素灰度值比较以划分像素。利用阈值分割方法来分割灰度图像时对图像有一定的假设,最常用的模型如下:假设图像由具有单峰灰度分布的目标和背景组成,如果处于目标或背景内部相邻像素间的灰度值高度相关,但处于目标和背景交界处两边的像素在灰度值上有非常明显的差别,那么灰度直方图可看作是由分别对应目标和背景的两个单峰直方图组合而成的。进一步就是说,如果这两个直方图分布大小接近且均值相距很大,并且两部分的均方差足够小,则直方图应为较明显的双峰。对这类图像常可选取阈值分割的方法来较好地提取特征目标。
在OpenCV图像库中的CVThreshold()函数为用户提供了简单、快速的阈值分割方法,其阈值设定方式分为固定阈值和自适应阈值。其中,二值化算法是最基本也是应用最为广泛的固定阈值分割方法之一[9-10]。在获取质量较好的图片的前提下,结合机器视觉技术,二值化算法足以满足灰度差异较为明显的图像分割的应用。在本研究中,由于暗点缺陷和亮点缺陷与背景的灰度值差距较大,所以选用固定阈值方式的二值化算法对于本研究的应用是适用的。
亮点缺陷检测采用全屏为黑色的背景图像,并将分割阈值设定为20,本研究固定阈值的设置采用先将预处理后没有噪声的图片作灰度直方图,由于图片只有缺陷和背景,所以直方图上的峰值即为缺陷点的像素值。亮点检测的阈值分割方法采用THRESH_BINARY类型的二值化处理[9]。如果src(x,y)>threshold。dst(x,y)=max_value;否则dst(x,y)=0。即将待测图像中每个坐标点的像素值与设定的阈值进行比较,如果待测点的像素值大于设定的阈值,此时将待测点的像素值赋值为max_value,反之赋值为0。其中,src(x,y)表示待测图像中某点的坐标,threshold表示设定的阈值。
暗点检测采用THRESH_BINARY_INV类型的二值化处理。如果src(x,y)>threshold,dst(x,y)=0;否则dst(x,y)=max_value。即将待测图像中每个坐标点的像素值与设定的阈值进行比较,如果待测点的像素值大于设定的阈值,此时将待测点的像素值赋值为0,反之赋值为max_value。做暗点检测时,选用THRESH_BINARY_INV阈值分割方法,其实质是将全屏为白色的背景转为全屏为黑色的背景,然后再进行阈值分割,最后转化成亮点检测。
3.2 标记缺陷
为了让检测出来的缺陷点缺陷更醒目,本研究采用创建包围轮廓的矩形和圆形边界框的方法将检测出来的缺陷点标记成矩形或者圆形。OpenCV使用函数boundingRect()来计算包围轮廓的矩形框。minEnclosingCircle()函数用来计算完全包围已有轮廓的最小圆,最终标记出来的缺陷是有最小半径值的圆。部分标记函数如下:
LCD显示屏点缺陷检测实验效果图如图7、图8所示,图7表示亮点检测,图8表示暗点检测。
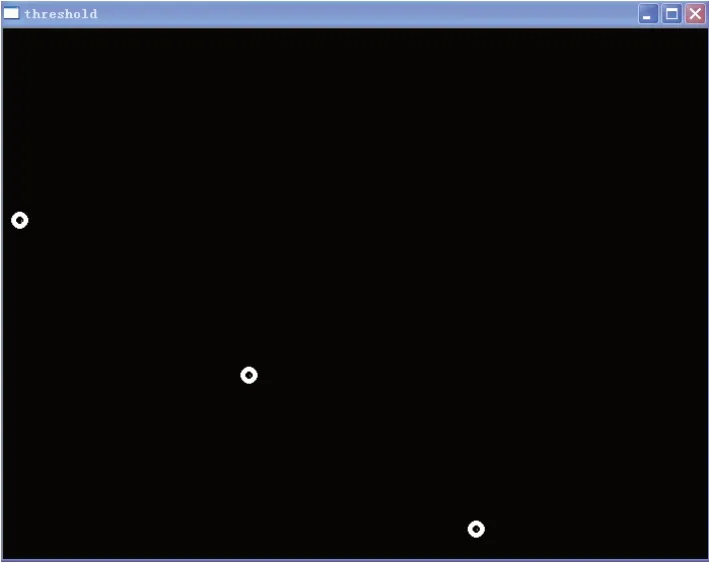
图7 亮点检测
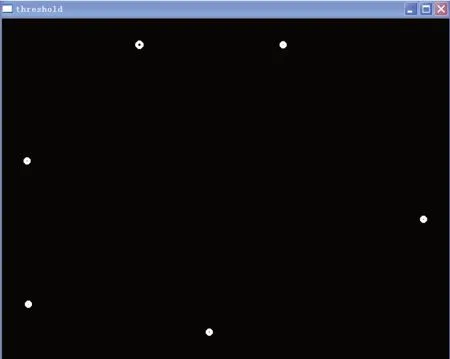
图8 暗点检测
由图7、图8可以看出,采用阈值分割与创建包围轮廓的矩形和圆形边界框相结合的方法,能准确快速地检测出暗点和亮点两种常见的LCD显示屏点缺陷。这种方法算法简单,检测速度快且检测结果准确,有一定的实用性。
4 总结
本研究采用机器视觉技术[10],以汽车指针仪表盘上的LCD显示屏为实验对象,根据LCD显示屏的点缺陷与背景灰度值差异,采用阈值分割与创建包围轮廓的矩形和圆形边界框相结合的方法实现LCD显示屏的暗点与亮点两种点缺陷检测。由实验结果可以看出,这种方法检测准确、算法简单,有一定的实用性,减少了人眼检测带来的误差,同时也能够提高检测的速度。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
北京航空航天大学学报(2022年6期)2022-07-02
军事文摘(2022年10期)2022-06-15
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
中国计算机报(2019年15期)2019-06-21
电子制作(2019年9期)2019-05-30
作文大王·低年级(2019年2期)2019-01-23
电子制作(2018年16期)2018-09-26
中国知识产权(2018年4期)2018-05-04
