
基于工业机器人的实木复合门单面喷漆生产线设计*
2022-02-10 08:38王静
南方农机 2022年2期
王 静
(新疆农业职业技术学院农业工程分院,新疆 昌吉 831100)
随着时代的发展,科技的进步,我国的生产制造行业正逐渐向智能制造转变[1-3]。传统手工工艺的实木复合门造价高、耗时长,不能够满足大批量生产的需求,而现代科技发展推动机器人行业的发展,现代机器人技术可以通过操作者自己的程序设计,将要完成的动作通过软件编程来实现,实木复合门单面喷漆生产线设计正是利用了机器人的智能化可编程性,代替了人工,解放了劳动力,提高了生产效率,能够满足市场大批量生产需求,同时降低企业生产成本[4-10]。
1 喷漆生产线工作站布局
1.1 喷漆生产线工作站组成
实木复合门的单面喷漆生产线设计中主要包含IRB4400运输机器人、IRB1600清灰机器人、IRB580喷漆机器人、输送带、实木复合门、传感器、吸盘、喷枪、工作台、码垛台、导轨、电机、木刷、安全保护装置以及专门的喷漆场所等。以传送带为基准,根据场地大小正确安放传送带,再根据机器人的工作范围选择适当的位置安放设备,满足工作要求前提下合理安放各部件。初步建立喷漆生产线工作站以后,对系统I/O板卡进行信号配置,编写机器人工作规划路径程序,进行各系统之间的信号连接,并调试运行。
1.2 喷漆生产线总体布局
实木复合门单面喷漆生产线设计依据机器人和人工辅助设计而成。该工作站以机器人运动路径规划为主,以人工辅助操作弥补机器人工作不足及工作站可能出现的错误,从而保证喷漆效果。该工作站利用搬运机器人真空吸盘抓取实木复合门,在导轨的水平移动下将实木复合门由固定工作台搬运至传送带上。
1)电机工作带动传送带运行,传送带开端设有传感器,在检测到实木复合门信号后,将信号传送给输送系统,输送系统开始工作,然后由打磨工具对实木复合门两边进行打磨。随后输送系统将工件输送到机器人清灰工位,工件定位完成后,会将到位信号传送给机器人系统。
2)机器人系统接收信号开始工作,按照事先编写好的路径程序对实木复合门表面进行清灰操作,实木复合门工位处设有一个传感器,当清灰操作完成后,机器人系统发送完成信号给传感器,传感器检测工件并传送给输送系统,输送系统将工件输送到机器人喷漆工位,工件定位完成后,会将到位信号传给机器人系统。
3)机器人系统接收信号开始工作,依照编写好的喷漆程序对实木复合门表面进行两遍喷漆,整个喷漆运动路径为“S”型,在整个的喷漆固化过程中传送带上装有防护装置,避免废料对传送带造成破坏,在传送带下面设有废料收集装置,将喷漆固化过程产生的废料、废渣收集到一块,最后流入铁桶内。当喷漆操作完成后,机器人系统发送完成信号给传感器。
4)传感器检测工件并将信号传给输送系统,输送系统将工件转移出喷漆房,在传送带的末端滑到工作台上,由人工将实木复合门搬运并放入码垛台上。
2 喷漆生产线硬件构成
2.1 机器人工具
要保证喷漆效果好,需保证实木复合门不被破坏,同时做好喷漆固化过程工作、选取合适的喷枪。因此,选取合适的机器人工具尤为重要。
1)对于抓取工具的选择。目的是能够将实木复合门牢固吸附以及平稳放置在传送带上,而且需要选择能够承受40 kg工作载荷的真空吸附式吸盘机械手。真空吸盘承受的总重量为40 kg,由于实木复合门表面平整不变形,可以采用平行吸盘,吸盘需要均匀放置,目的是对工件形成均衡的吸附力。
2)对喷漆工具选择。需要根据实木复合门尺寸来确定,对实木复合门较大面积处的喷漆,可以选择喷枪的口径为0.6 mm~1.3 mm,喷枪口径选择也需要以需喷油漆的面积作为参考。选择静电喷枪中的液体喷枪可以极大提高实木复合门的上漆率,减少油漆浪费。
首先,要想有效地实行“翻转课堂”,学校应该完善信息技术软硬件设备,学校机房应该在课余时间随时向学生开放,以方便学生观看视频录像自主学习。
2.2 机器人选择
1)机器人的抓取工作对环境要求不高,根据实木复合门的尺寸可以选择相适应的机器人。选取的IRB机器人需满足必要的承重,以及具有合适的高度,在其工作范围内能够灵活运动,将实木复合门放置到传送带上,使实木复合门与传送带平行放置。选取IRB4400机器人可以满足条件,保证喷漆质量以及合适速度。机器人实景图如图1(a)所示。
2)实木复合门喷漆前需要对其表面清灰,否则会影响喷漆效果。对于清灰机器人类型的选择,要确保清灰机器人的工作范围能够涵盖实木复合门的上表面,机器人对环境的要求不大,选取IRB1600机器人可以满足条件,保证清灰工作效果。机器人实景图如图1(b)所示。
3)实木复合门喷漆是喷漆生产线设计关键。喷漆工作环境需要专门定制,对于喷漆机器人类型的选择,需要考虑实木复合门的尺寸、承重,选择喷漆空间范围内适合的喷漆机器人,目的是确保喷漆机器人的工作范围能够涵盖实木复合门的喷漆表面,还需要根据喷漆工具的类型选择合适的喷漆机器人,喷漆的形式也是重要的参考,选取IRB580机器人可满足条件,保证喷漆均匀以及速度合适。机器人实景图如图1(c)所示。

图1 机器人实景图
3 机器人系统方案设计及主要参数
3.1 工作站布局
喷漆生产线需要RobotStudio软件进行编程、仿真,以能在现场环境模拟机器人运作。根据需求对辊子输送带、实木复合门、真空吸附式吸盘机械手、喷枪、木刷、工作台、码垛台以及专门的喷漆场所等建立3D模型。创建必要的机器人系统,待建模完成后,通过RobotStudio软件将数据导入已建立好的机器人系统中,根据工作内容编写路径程序,并通过仿真调试模拟实物操作,发现其中存在的问题,从而避免在实际硬件中一些操作失误对设备造成破坏,提高工作效率。喷漆生产线工作站总布局图如图2所示。
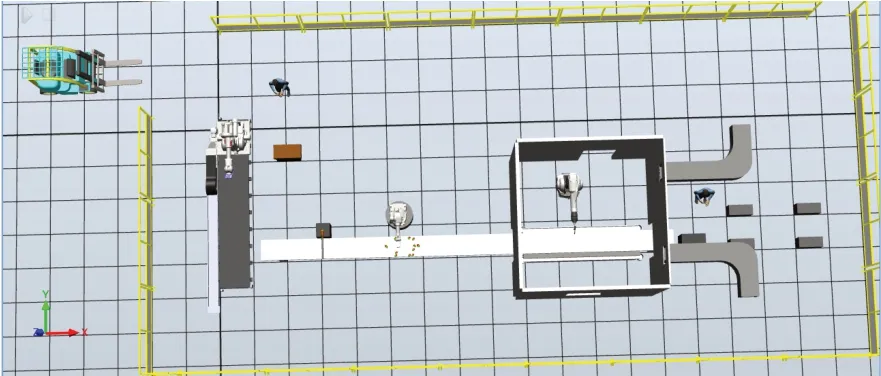
图2 喷漆生产线工作站总布局图
3.2 工业机器人的参数
1)IRB4400机器人:承重60 kg,最大工作半径1.96 m,轴数6个,重复定位精度0.19 mm,底座尺寸920 mm×640 mm,本体质量1 040 kg,外部接入电源范围为200 V~600 V、频率范围为50 Hz~60 Hz,控制柜防护等级为IP54,单元可接受的温度范围为5 ℃~45 ℃,噪声水平最高70 dB(A),相对湿度最高95%。IRB4400机器人整体结构参数如图3所示。

图3 IRB4400机器人整体结构参数
2)IRB580喷漆机器人:承重能力10 kg,轴数6个,手臂长度为1 220 mm,底座尺寸660 mm ×750 mm,本体质量627 kg,外部接入电源范围为200 V~600 V、频率范围为50 Hz~60 Hz,控制柜防护等级IP67,单元可接受的温度范围为5 ℃~45 ℃,位姿精度0.3 mm,路径精度范围为±3 mm,安全性达到紧急停、启动装置、普通方式停、自动方式停、测试方式停、控制柜互锁要求。IRB580机器人整体结构参数如图4所示。
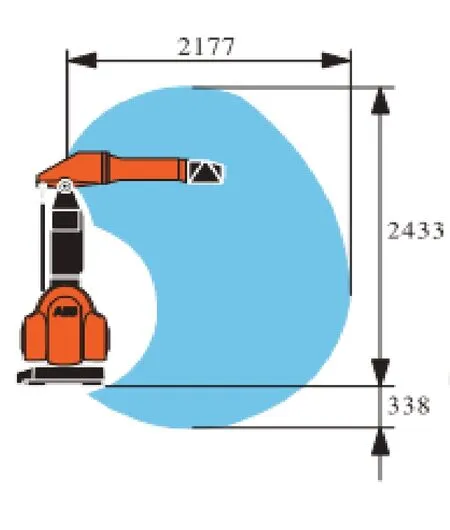
图4 IRB580机器人整体结构参数
3)IRB1600清灰机器人:承重能力6 kg,轴数6个,手臂长度为1 200 mm,底座尺寸484 mm×684 mm,本体质量250 kg,外部接入电源范围为200 V~600 V、频率范围为50 Hz~60 Hz,功耗0.58 kW,控制柜防护等级为IP67,单元可接受的温度范围为5 ℃~45 ℃,重复定位精度0.02 mm,路径定位精度0.13 mm,安全性达到双回路监控、紧急停机要求。IRB1600机器人整体结构参数如图5所示。
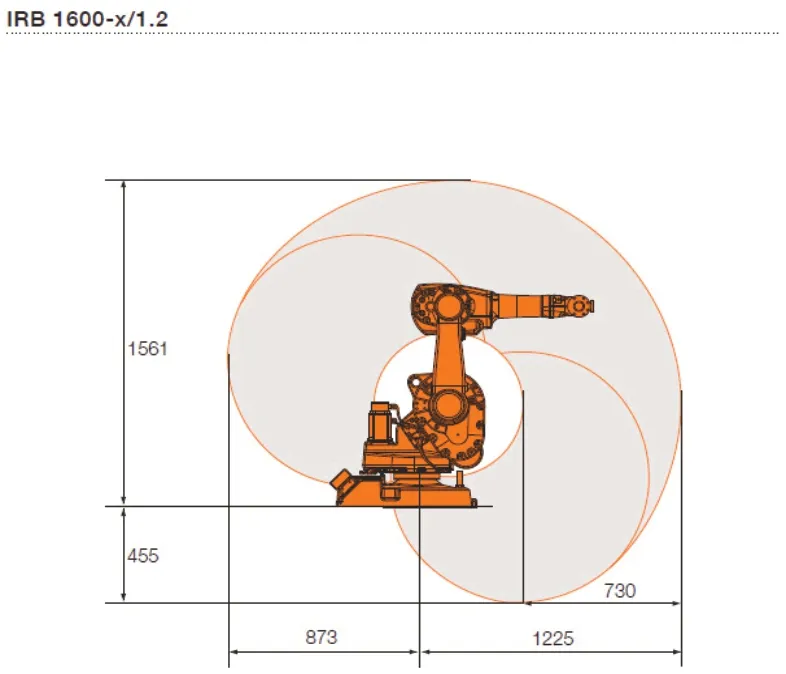
图5 IRB1600机器人整体结构参数
3.3 离线程序编程
1)搬运机器人的I/O信号创建。新建Signal,重启示教器后在事件管理器添加I/O 信号触发器。IRB4400的I/O system的具体参数设置如表1所示。
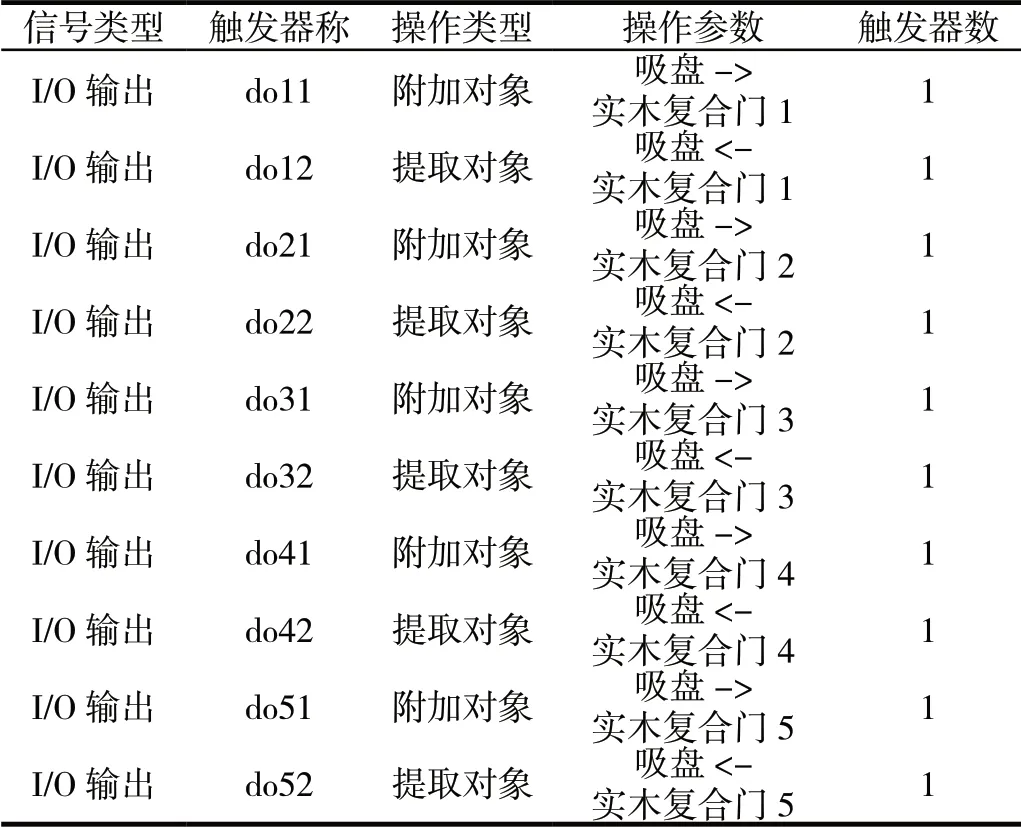
表1 IRB4400的I/O系统的具体参数设置
2)SmartComponet-1输送带的设计。利用SmartComponet-1创建传感器及输送系统,系统界面参数设置如图6、图7所示。

图6 LineSensor属性
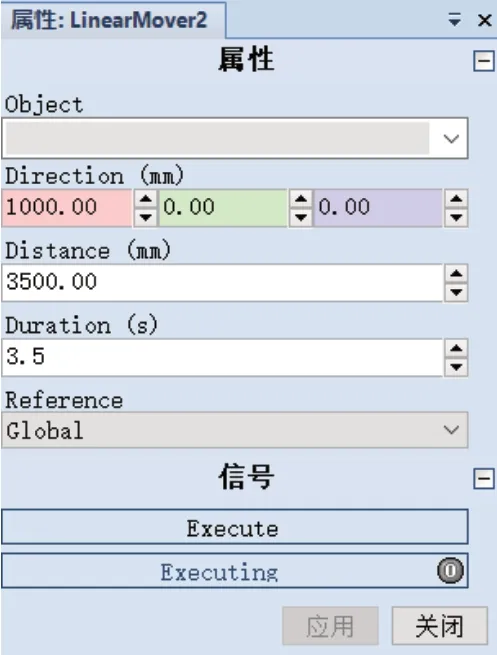
图7 LineMover2属性
3)清灰机器人的I/O信号。在控制器配置中添加信号:添加信号类型为数字输入信号,信号名称为M;添加信号类型为数字输出信号,信号名称为W1。
4)SmartComponet-2输送带的设计。SmartComponet-2控制传送带将实木复合门从清灰机器人处运动到喷漆场所内部。系统界面参数设置如图8、图9所示。
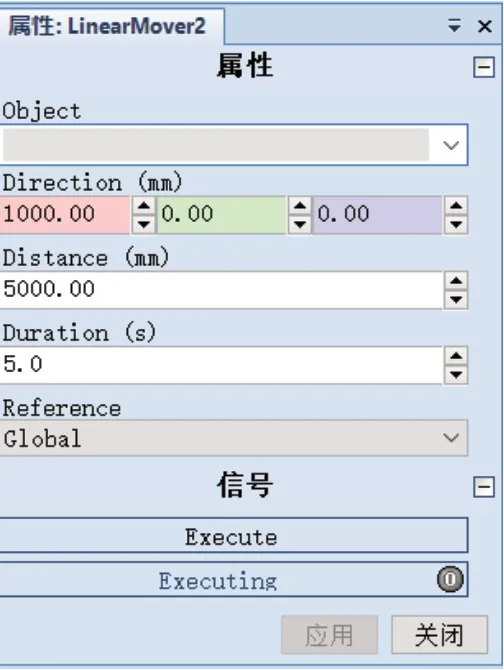
图8 LinearMover2属性

图9 LineSensor属性
5)喷漆机器人的I/O信号。在控制器配置中添加信号:添加信号类型为数字输入信号,信号名称为PT;添加信号类型为数字输出信号,信号名称为QC。
6)SmartComponet-3输送带的设计。SmartComponet-3控制传送带将实木复合门从喷漆场所内部运动到传送带末尾。系统界面参数设置如图10、图11所示。

图10 LinearMover2属性
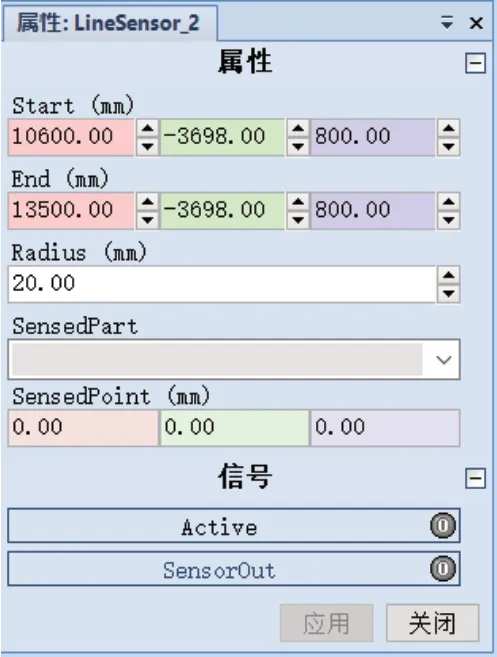
图11 LineSensor-2属性
3.4 工作站运行和调试
1)示教器调试。利用示教器将机器人系统所要编程的路径轨迹程序单独调试,调试成功后将喷漆需要的部件导入工作站中,合理放置位置。在机器人系统的路径与步骤中找到机器人系统的轨迹路径程序,通过对工业机器人示教器进行程序调试,并检测机器人工作范围是否有干涉、信号连接是否正确、路径指令程序是否正确等。若仿真播放运行工作站成功,将工作站保存。
2)仿真工作站运行。将上述工作准备完毕后,检查并测试程序没有错误,以及机器人运动不存在问题后,在RobotStudio界面进行仿真演示,在功能选项中点击录制视图,保存并命名,最后生成exe文件。
4 结论
1)基于工业机器人的实木复合门单面喷漆生产线主要由IRB4400运输机器人、IRB1600清灰机器人、IRB580喷漆机器人、输送带、实木复合门、传感器、吸盘、喷枪以及专门的喷漆场所等部分组成,具有生产效率高、喷漆效果均匀等特点。
2)选取IRB4400机器人可以保证喷漆质量以及速度合适,选取IRB1600机器人可以保证对实木复合门的清灰工作质量,选取IRB580机器人可以保证实木复合门的喷漆均匀以及速度合适。
3)设计了工作站布局图,并进行了工作站的搭建,然后进行离线编程及调试,接着编写相关的运行程序,最后进行离线仿真实验完成整个生产线的设计。
猜你喜欢
环境卫生工程(2022年1期)2022-03-09
艺术品鉴(2021年27期)2021-10-24
大众汽车(2019年8期)2019-12-06
E动时尚·科学工程技术(2019年19期)2019-09-10
科技资讯(2019年12期)2019-07-08
东西南北(2017年3期)2017-03-01
汽车维护与修理(2016年10期)2016-07-10
科学中国人(2015年2期)2015-04-10
中国质量万里行(2015年2期)2015-03-31
中国质量万里行(2015年2期)2015-03-31
