
实例在“自动控制原理”教学中的应用*
2022-02-10 08:38于巧娜高联学
南方农机 2022年2期
于巧娜 , 高联学
(滨州学院电气工程学院,山东 滨州 256600)
随着现代科技的发展,自动控制应用的场合越来越多,尤其在工业、农业、航空航天、国防科技等领域。“自动控制原理”是自动化专业必修课,是“现代控制原理”“电机控制”以及“自动控制系统设计”课程的基础,只有学习了“自动控制原理”,才能进一步学习相关的控制课程[1-2]。学习“自动控制原理”课程的目的是让学生掌握经典控制理论和状态空间方法的相关知识,主要包括自动控制系统数学模型的建立、稳定性分析和稳态误差的计算、根轨迹的绘制和频率分析、系统的校正设计、非线性系统的分析方法、采样系统理论和现代控制原理基础。学习的内容理论性较强,学生理解起来比较困难,会出现学生掌握了相关知识但不知道具体的应用场合、理论联系实际的能力比较差的情况。因此,需在课堂上引入现代科学案例,提高学生对课程的学习兴趣和应用能力,进而提高学生的学习效率。课题组以具体的案例设计将现代科技与课程相关知识相结合,融入讲课过程,以让学生了解自动控制应用的场合,如何提出问题,如何运用相关的知识解决问题,以及最终如何验证问题是否得到真正解决。
1 案例导入
上课之前,通过视频向同学们展示“哈勃遗产场”(HLF)照片图组,吸引同学们的注意力。同时对图片进行介绍:哈勃遗产场是迄今最全面、最完整的宇宙图谱,这些照片是由哈勃望远镜在16年里拍摄的大约7 500张照片拼接成的,包含星系大概有65 000个,这些星系有的至少具有133亿岁的高龄。然后展示现仍在服役的哈勃望远镜的工作视频。再介绍哈勃望远镜的历史:哈勃望远镜是以天文学家爱德温·哈勃的名字命名的,是运行在地球轨道上的望远镜,哈勃望远镜接收来自地面控制中心的指令,按照指令要求拍摄照片并将照片通过无线数据的形式传回地球,因其在地球大气层之外,可以获得绝佳的拍摄视角。于1990年发射之后,成为天文史上最重要的观测仪器。哈勃望远镜只有2.4米的镜头,但是却可以将400英里以外的视场聚集在一个硬币上。然而,哈勃望远镜观测的图片会存在一定的偏差,于1993年12月进行了一次大规模的校正任务。现根据已知的条件分析如何实现系统的校正过程,以及分析校正后的系统是否达到校正要求。
2 教学过程
实现哈勃望远镜系统的校正,需要分析哈勃望远镜所处的环境是什么,输入信号是什么,干扰信息是什么。此时就需要教师将现实的输入和干扰抽象为课本所学的信号类型,并引导学生分析典型外作用力,其主要包括以下方面。
根据上述信号类型,可以认为哈勃望远镜接收的指令信号为单位阶跃信号和斜坡信号,受到来自外太空的干扰信号有阶跃信号和脉冲信号[3],而脉冲信号对系统的影响比较小,可以认为对哈勃望远镜的干扰信号主要为脉冲信号。因此,上述系统校正的目标主要是选择合适的K和K1值,使系统达到以下目标:1)当系统的输入为单位阶跃信号时,系统输出的超调量不超过10%;2)当系统的输入为斜坡函数时,系统的稳态误差达到最小值;3)系统在受到阶跃信号的干扰下,系统受到的影响尽可能地小[4]。哈勃望远镜指向系统模型如图1所示。由图1可知,系统有内环,还需将系统框图简化为最简系统。应用动态结构图的等效变换,可以将系统简化为如图2所示的系统。

图1 哈勃望远镜指向系统
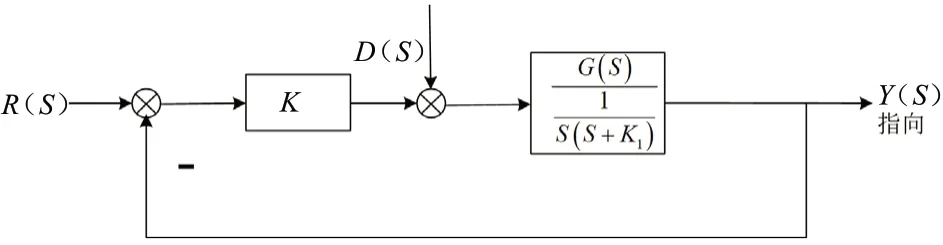
图2 简化框图
由图2可以得出系统在指令信号和干扰信号下系统的输出为:

对系统超调量分析时,需要知道只有系统接收到单位阶跃信号时,系统才会产生超调量。这里所涉及的相关知识为:控制系统的时间响应,可以划分为过渡过程和稳态过程。过渡过程指的是系统从初始状态到接近最终稳态的响应过程;稳态过程指的是时间t趋向于无穷的输出状态。系统的性能指标满足:1)延迟时间,为输出响应曲线上升到稳态值的50%时所需的时间;2)上升时间,为输出响应曲线上从稳态值的10%上升到90%所需的时间;3)峰值时间,为输出响应曲线中输出值超过稳态值达到第一个峰值所需的时间[5];4)超调量,在输出响应曲线上超出稳态值的最大偏离值和稳态值之比时,即5)稳态误差,当时间趋于无穷时,系统的单位阶跃响应的实际值与期望值之差,即
系统的误差分析中,首先要判断系统是否稳定,而判断系统稳定的定理主要有赫尔维茨判据、林纳德-奇帕特判据、劳斯判据。劳斯判据又称为代数稳定判据,劳斯于1877年提出的稳定性判据能够判定一个多项式方程中是否存在位于复平面右半部的正根,而不必求解方程。由此劳斯获得了亚当奖。劳斯判据是一种代数判据方法。它是根据系统特征方程式来判断特征根在S平面的位置,从而决定系统的稳定性。由于不必求解方程,为系统的稳定性的判断带来了极大便利。假若劳斯阵列表中第一列系数均为正数,则该系统是稳定的,即特征方程所有的根均位于根平面的左半平面。假若第一列系数有负数,则第一列系数符号的改变次数等于在右半平面上根的个数。劳斯判据不仅可以判别系统稳定性,即系统的绝对稳定性,而且也可检验系统是否有一定的稳定裕量,即相对稳定性[6]。另外,劳斯判据还可用来分析系统参数对稳定性的影响和鉴别延滞系统的稳定性。当前系统中,可以采用劳斯判据来判断系统的稳定性。
稳态误差的计算只要应用的是终值定理,若e(t)的拉普拉斯变换为E(s),且存在,则有。上述定理需要注意的问题为:在计算系统误差的终值(稳态误差)时,遇到的误差的象函数一般是s的有理分式函数,这时当且仅当的极点均在左半面,就可保证成立。sE(s)的极点均在左半面的条件中,蕴涵了闭环系统稳定的条件[7]。
介绍完相关的知识后,就可以继续对哈伦望远镜进一步的求解。首先选择K和K1值满足对单位阶跃输入信号的超调量要求。令R(s)=A/S,D(S)=0,可以求出:

为了使超调量不超过10%,系统的阻尼比应为0.6,同时可以求出在阻尼比为0.6时,系统的超调量为9.5%,满足了系统对超调量的要求。因此,可以暂时认定系统的阻尼比就为0.6[8-9]。
接下来对系统在输入为单位斜坡函数信号时的稳态误差。当输入R(s)=Bt,t>0时,根据误差公式可以求得:
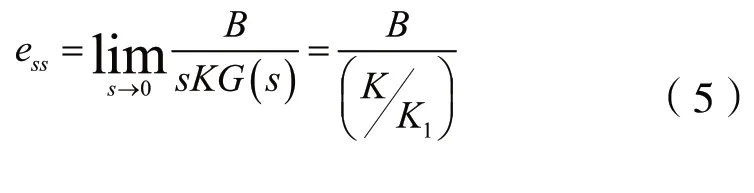
让同学们自行推导由单位阶跃干扰引起的稳态误差,其结果为(-1/K)。根据上述误差结果可知,增大K可以减小系统稳态误差ess,也就是降低了干扰信号而引起的瞬态响应[8]。因此,就需要求出一个比较大的K和较大的K/K1,以确保系统对输入信号为单位斜坡函数时,系统的输出具有较小的稳态误差[10]。与此同时,还需要确保前面已经确定的阻尼比为0.6时,来减小超调量。
为了完成对哈伦望远镜系统的设计,需要对系统的K值进行求解。当阻尼比为0.6时,系统的特征方程为[1]:

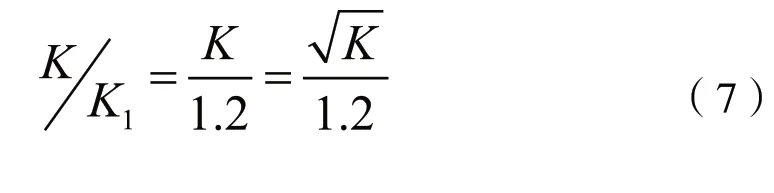
根据上述可知,若选择K=25,则K1=6、K/K1=4.17。若选择K=100,则K1=12、K/K1=8.33。在实际的应用系统中,总是希望系统是线性系统,因此,必须对K值进行限制,让系统工作在线性区域[2]。当K=100时,可得出哈勃望远镜指向系统的结构如图3所示。同时可得出系统对单位阶跃信号和单位阶跃干扰的响应如图4所示,由图可知,单位阶跃响应对系统的影响并不是非常明显。
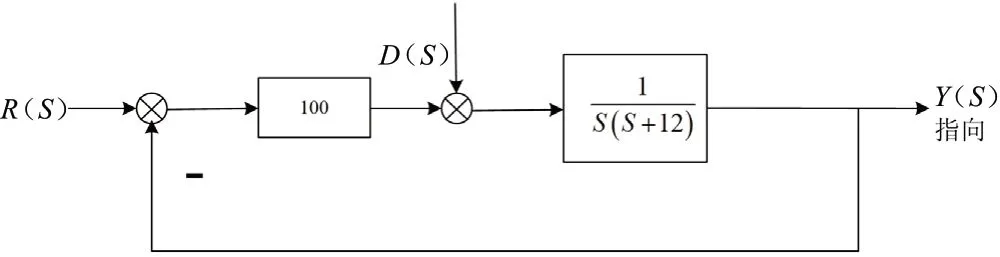
图3 哈勃望远镜指向系统的结构图
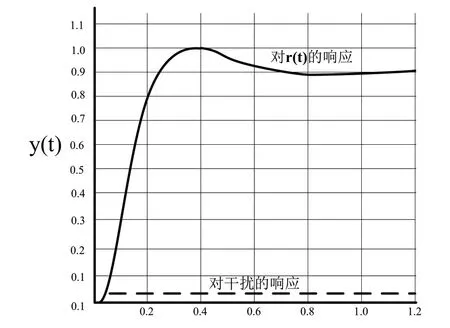
图4 系统对单位阶跃信号和单位阶跃干扰的瞬态响应
最后,可得到系统对斜坡输入的稳态误差为:

由此可见,当选择K=100时,得到的是一个很好的系统。
3 小结
通过对哈勃望远镜的校正系统设计,逐步引导学生学习时域系统的典型外作用力、控制系统的时间响应指标、系统的误差分析方法。让学生掌握了相关知识的同时,也知道面对一个不太熟悉的系统应该如何分析、如何计算,大幅度地提高了学生对“自动控制原理”课程学习的兴趣。
猜你喜欢
汽车维修与保养(2021年11期)2021-03-11
百科知识(2020年11期)2020-06-12
沈阳工业大学学报(2020年3期)2020-06-03
百科知识(2020年10期)2020-06-01
电子技术与软件工程(2020年17期)2020-02-02
舰船电子工程(2019年9期)2019-09-27
科教导刊·电子版(2016年30期)2016-12-26
大学教育(2016年11期)2016-11-16
百科探秘·航空航天(2015年5期)2015-12-01
太空探索(2015年5期)2015-07-12
