
基于柔性管缆运动监测数据的位移计算方法
2022-02-11 13:27赵晨宇罗晓兰刘军鹏
石油矿场机械 2022年1期
赵晨宇,罗晓兰,张 涛,刘军鹏
(中国石油大学(北京) 机械与储运工程学院, 北京102249)
柔性管缆是连接水下油气开采设备与水上浮式平台的重要设备,有顺应性强、安装和回收成本低等诸多优点,在深海油气生产中获得广泛应用。但是,由于柔性管缆长期受到风、浪、流载荷和船体往复摆动的挤压作用,非常容易发生过度弯曲和疲劳破坏。为此,必须通过实时监测的柔性管缆加速度运动数据,获得柔性管缆的瞬时位移,为柔性管缆弯曲强度和疲劳强度计算提供理论依据。
通过实时监测的柔性管缆加速度运动数据,求取瞬时运动姿态角,最终获得其瞬时位移的常用方法主要有欧拉角法、方向余弦法和四元数算法。
1) 欧拉角法。
用1组欧拉角来描述动态坐标系与固定坐标系之间的关系。该方法需要求解3个姿态角的微分方程。姿态角矩阵不需要正交化,但需用三角函数计算,工作量大[1]。当监测对象的俯仰角达到90°时,方程会出现奇异现象,不能进行全姿态角求解,应用有一定的局限性。淡鹏等针对火箭大角度运动下的姿态角计算问题,应用欧拉角法对实际案例进行了探讨和分析[2]。该方法对火箭姿态角解算和卫星姿态分析有一定的借鉴意义,但当火箭姿态角变化较大时,其计算结果存有较大误差。夏喜旺等研究了飞行器大姿态角的计算问题,推荐采用四元数法来描述飞行姿态角,以避免欧拉角法存在的奇异现象[3]。
2) 方向余弦法。
通过定点旋转的相应2个坐标之间的夹角余弦来表示姿态角矩阵。该方法可用于任意姿态角的计算,但计算量大,工程上并不实用。李连仲等推导了方向余弦矩阵的更新递推公式,通过仿真对其递推公式进行验证,研究并提升其公式精度[4],可满足捷联惯导系统应用中的精度要求。刘恒春提出用三角函数法求解捷联惯导系统中的方向余弦矩阵,计算结果表明此方法精度高,但其计算过程颇为复杂[5]。刘瑞华提出新的3阶最小参数法来解算方向余弦矩阵微分方程,结果表明其计算精度与经典的3阶毕卡迭代数值计算方法差不多,但姿态角解算的响应速度即实时性显著提高[6]。
3) 四元数法(又称四参数法)。
通过建立的4个微分方程求解四维空间向量。运用四元数法求解姿态角,具有精度高、计算量小、可避免奇异性的优点,是目前计算姿态角的常用方法之一。四元数法需通过传感器陀螺仪输出柔性管缆运动时的角速率数据,运用四元数角速率法进行姿态更新。黄昊等针对陀螺仪角速率的姿态算法进行研究,理论上推导了几种航姿算法的误差表达式,计算结果表明四元数法和4阶Runge-Kutta法相结合是处理该问题的有效算法[7]。史凯等采用四元数法和4阶Runge-Kutta法研究炮弹姿态,进行仿真平台模拟和样机实际试验,证明该算法可推广工程应用[8]。许毛跃等解算姿态角时,发现计算步长对使用4阶Runge-Kutta法求解四元数微分方程时的计算误差有较大影响[9]。王德春等提出了Adams预测-校正-改进算法,提高了捷联惯导系统的姿态角解算精度[10-11]。
吴简彤等对比分析了四元数法、欧拉角法、方向余弦法[12],研究结果表明:运用四元数法进行姿态角解算性能最佳,实用性更强。因而可用于柔性管缆姿态角的解算,而欧拉角法与方向余弦法因其计算量大、方程会出现奇异现象、公式复杂的问题,均不适用于求解姿态角。
本文将利用柔性管缆的实时监测数据,运用四元数法和4阶Runge-Kutta法进行姿态角的计算,并应用MATLAB软件,最终获得柔性管缆的实时位移数据。为此,柔性管缆实时监测系统是对实时位移求解精度具有重要的作用。
1 监测系统简介
1.1 监测总体方案
柔性管缆监测系统由管缆运动记录仪及夹具2个部分组成。此监测装置安装在防弯器下方1~2 m区域内的柔性管缆上,如图1所示。该区域为高应力或高疲劳损伤的部位,可捕获最大的加速度监测数据。
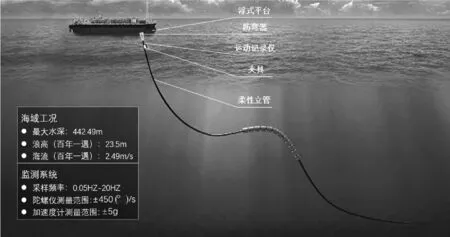
图1 监测系统布局示意
1.2 监测模块说明及测量数据
1.2.1 检测模块说明
监测系统的测量单元采用EPSON公司的G354传感器(如图2),此传感器是1个6自由度惯性测量单元,包括三轴加速度计和三轴陀螺仪。其中,三轴加速度计记录监测点的三轴线性加速度数据,三轴陀螺仪记录监测点的角速率数据,监测数据实时存储在大容量SD卡中,定期提取记录仪存储的数据。监测模块采用高聚能锂电池组供电,可满足6个月连续工作的要求。
图2 G354传感器
1.2.2 测量数据及处理
监测模块获得的三轴线性加速度数据包括哥氏加速度、重力加速度和运动加速度,而柔性管缆的运动情况只与运动加速度有关,所以哥氏加速度与重力加速度作为加速度数据中的污染项,需被剔除。鉴于哥式加速度过小,可直接忽略。为剔除重力加速度,需要在加速度计水平和倾斜2种状态下分析计算。
1) 加速度计水平状态。
当传感器静止时,加速度计处于水平状态,如图3所示。此时,X0、Y0方向的重力加速度分量为0,而Z0轴方向的重力分量为g。
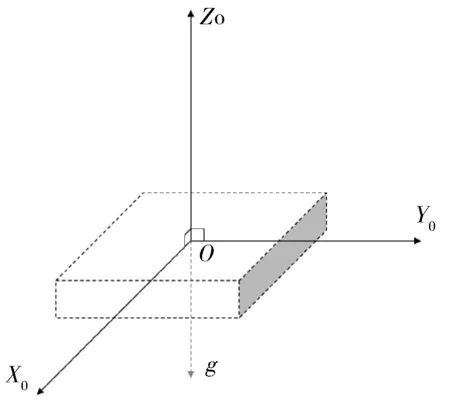
图3 三轴加速度计处于水平状态
2) 加速度计倾斜状态。
当加速度计随柔性管缆摇摆,处于倾斜状态时。此时,加速度计各轴与Z0轴存在一定的夹角,动坐标系OX1Y1Z1各轴与定坐标系OX0Y0Z0对应各轴的夹角为φ、θ、ψ,如图4所示。加速度计各轴在动坐标系内都有重力加速度的分量。
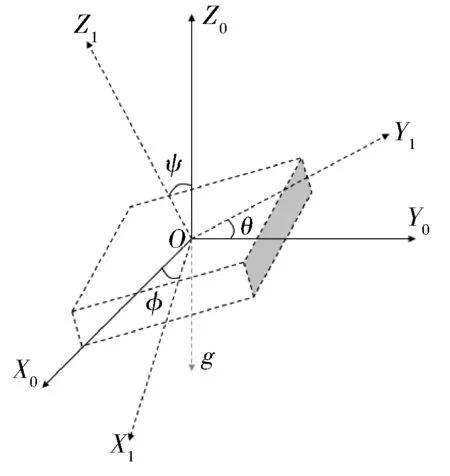
图4 三轴加速度计处于倾斜状态
要剔除动坐标系内各轴的重力加速度分量,需结合监测模块中三轴陀螺仪输出的角速率数据,计算任意时刻动坐标系各轴相对于定坐标系各轴的夹角,通过夹角确定各轴的重力加速度分量。为此,通过四元数微分方程及4阶Runge-Kutta法对三轴角速率处理,以对柔性管缆任意时刻的姿态角进行求解。
2 柔性管缆姿态角的求解
2.1 四元数表示坐标变换
四元数的数学表达式为:
(1)
四元数能便捷地描述刚体的角运动,通过旋转运算来实现这种转动关系。针对图4,OX0Y0Z0在经过旋转变换后,得到新坐标系OX1Y1Z1,其旋转运算表达式为:
(2)
(3)

(4)

(5)

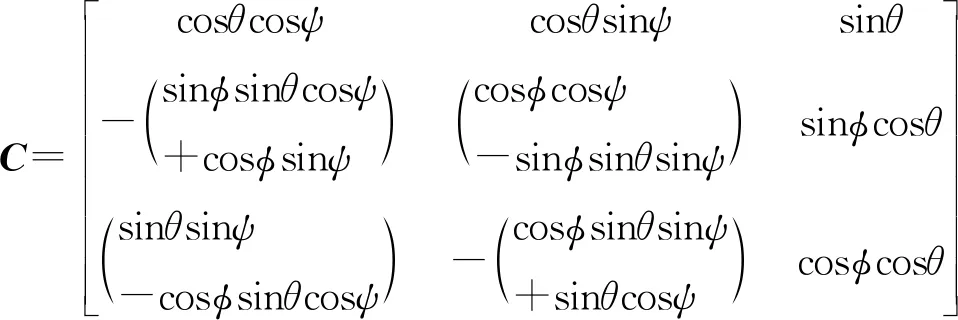
将式(1)和式(3)~(5)代入式(2),进行变换,并用矩阵的型式表达,则有:

(6)
坐标变换系数决定着动坐标系相对于定坐标系的位置,系数矩阵C实质上就是姿态角矩阵,经姿态角矩阵可计算运动状态的姿态角,即,将矩阵式(6)简化为:
(7)
为了求解式(6)矩阵中的四元数值q0、q1、q2、q3,需建立四元数微分方程并确定四元数的初值,再应用4阶Runge-Kutta算法对四元数进行迭代,计算出任意时刻的四元数值。
2.2 四元数微分方程的建立
四元数微分方程一般用单位四元数来推导,四元数描述了刚体的定点转动,单位四元数的表达式[13-14]为:
(8)

对式(8)进行求导,并将α的求导值用角速率ω表示,得到3个任意动坐标的角速率矩阵为:
(9)
式中:ωx为任意动坐标系中X轴的角速率;ωy为任意动坐标系中Y轴的角速率;ωz为任意动坐标系中Z轴的角速率。
由式(9)看出,四元数法在进行姿态角解算时,仅需解4个一阶微分方程,运算量显著减少。
2.3 四元数初值确定
四元数的初始值可看作是1个初始对准的过程。图4所示,设三向定坐标分别按照角度ψ、θ、φ转动3次后的四元数形式[15-16]为:
(10)
(11)
(12)
将Q1,Q2,Q3连乘得到Q,并用矩阵表达,有:
(13)

当ψ=0,θ=0,φ=0时,即初始时动坐标系与定坐标系重合,把初始夹角代入式(13),求得此时的四元数初值为:
(14)
2.4 四元数微分方程的求解
Runge-Kutta法是一种精度较高的单步长算法,在工程中广泛使用。对于四元数微分方程式(9),其4阶Runge-Kutta法表达式为:
(15)
式中:q为四元数向量;k为斜率;h为程序迭代的步长。
通过4阶Runge-Kutta法可解算出四元数微分方程,由四元数初始值开始逐点计算,陀螺仪测得的三轴角速率ωx、ωy、ωz作为输入条件,可计算出对应的任意时刻的四元数值,最终求解出式(7)的姿态角矩阵。
2.5 姿态角的求解
为了将式(7)姿态角矩阵的值转化成任意时刻的姿态角,需建立动坐标系的旋转矩阵,如图5所示,初始时动、定坐标系相互重合,然后将z轴固定,x轴与y轴转动ψ角,得动坐标系OX1Y1Z1;再将y轴固定,x轴与z轴转动θ角,得动坐标系OX2Y2Z2;最后,将x轴固定,y轴与z轴转动φ角,动坐标系在空间中到达位置OX3Y3Z3。
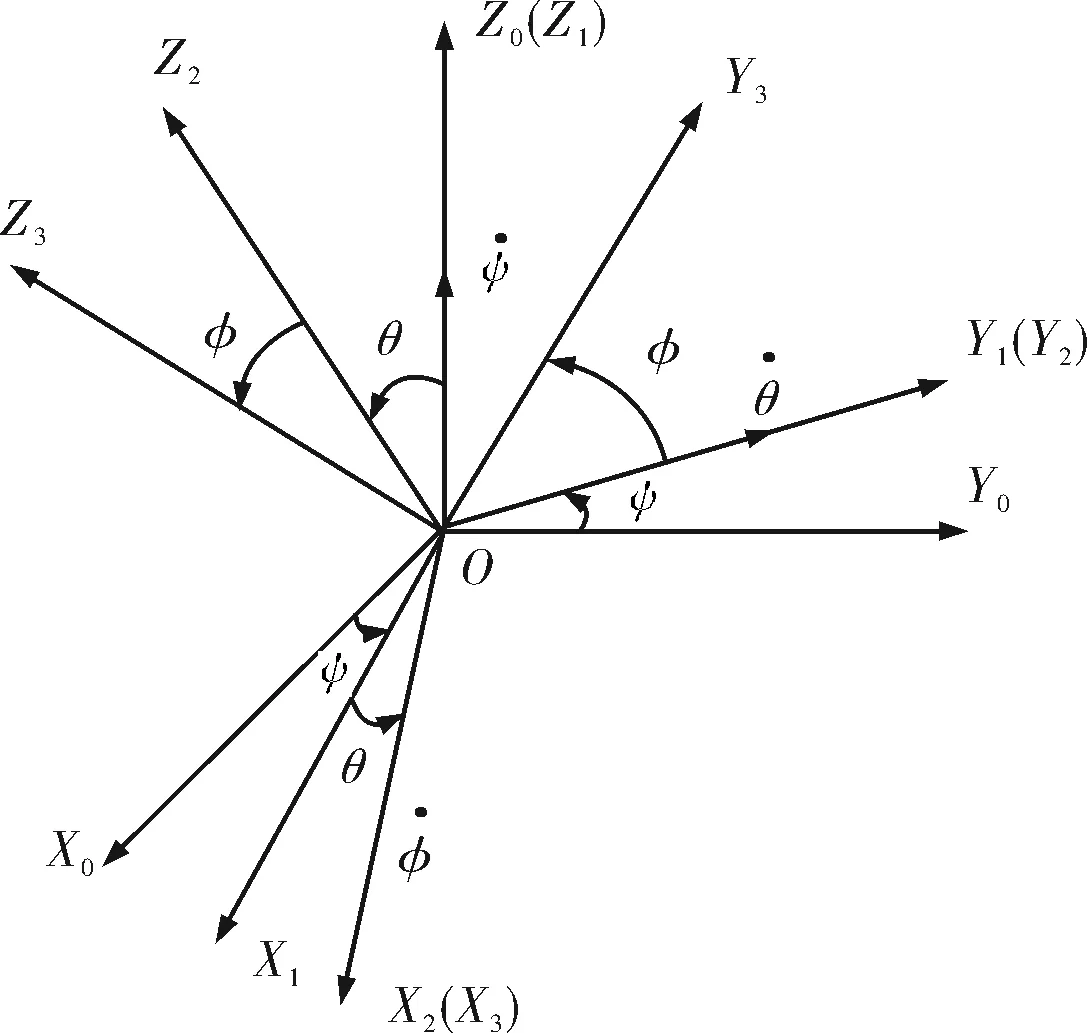
图5 三次转动结果
三次转动后的坐标系矩阵为:
(16)
从式(16)可以看出,转动后的坐标系矩阵最终形式不仅取决于转动次序,还取决于每次单独转动角的大小。四元数旋转矩阵与动坐标系旋转矩阵数学含义相等,四元数旋转矩阵转动向量是四元素,而坐标系旋转矩阵转动的向量是对应的坐标轴,因此,四元数旋转矩阵与坐标系旋转矩阵是等效的,则:
(17)
由式(7)和(17)得:
(18)
将四元数值代入四元数旋转矩阵,则可求得解算姿态角所需C21、C11、C31、C32、C33各元素的值,可由式(19)求得。
(19)
应用MATLAB软件将上述推导公式编程后,可完成对应时刻的四元数值及姿态角的求解。
3 柔性管缆位移数据求解
3.1 运动加速度求解
监测模块上测得的加速度关系式为:
(20)
重力加速度在动坐标系中的表达式为:
(21)
式中:Ax、Ay、Az分别为加速度计x、y、z三轴的读数;ax、ay、az分别为动坐标x、y、z三轴运动加速度的分量;gx、gy、gz分别为动坐标x、y、z三轴重力加速度的分量。
通过求解出的式(18)姿态角数据,可以求解重力加速度在三轴上的分量,并在监测模块获得的线性加速度数据中将其剔除。
3.2 监测点位移求解
利用剔除后的动坐标系的加速度ax、ay、az,应用FFT频域计算位移,先将运动加速度的时域信号转换到频域。然后根据傅立叶变换的性质,经过频域的积分和滤波后,通过傅里叶逆变换返回时域,此时得到的数组即为时域数组积分的结果。时域和频域中信号之间的对应关系可用离散傅里叶变换实现,对应关系为:
(22)
(23)
式中:a(n)为加速度信号;X(k)为a(n)的频谱;N为采样数据量;n、k均为非负整数。
对信号做离散化处理,并通过傅里叶变换,则有:
(24)
(25)
式中:v(n)、d(n)分别为速度信号和位移信号的离散化表示;ωk=2πkΔf,Δf=Fs/N,为频率分辨率。
根据上述算法,并参考王济[17]在频域中对振动加速度信号的处理,设计具体计算程序,应用MATLAB软件计算得出柔性管缆位移结果,为柔性管缆弯曲强度和疲劳强度计算提供一定理论依据。
4 仿真结果
通过MATLAB软件对上述公式进行编程计算,可得以下计算结果。图6为姿态角随时间的变化曲线。
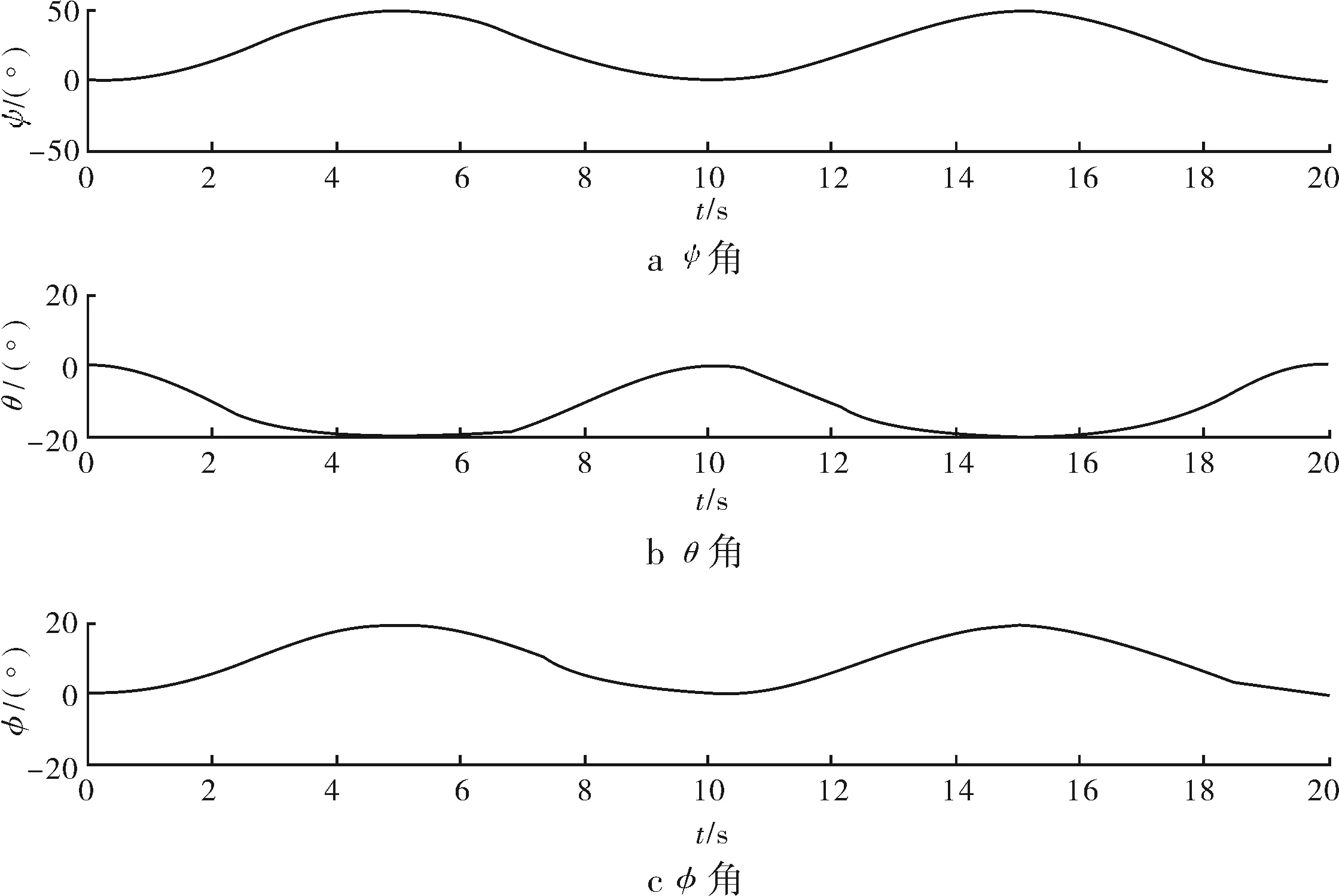
图6 姿态角信号
图7为重力加速度分量随时间的变化曲线。
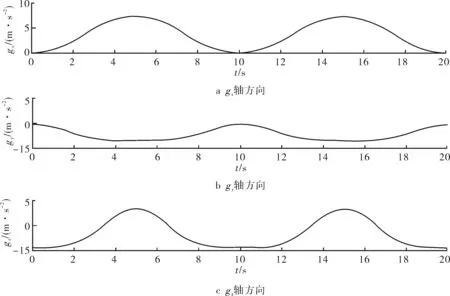
图7 重力加速度分量信号
图8为剔除加速度计中的重力加速度分量后,运动加速度随时间的变化曲线。
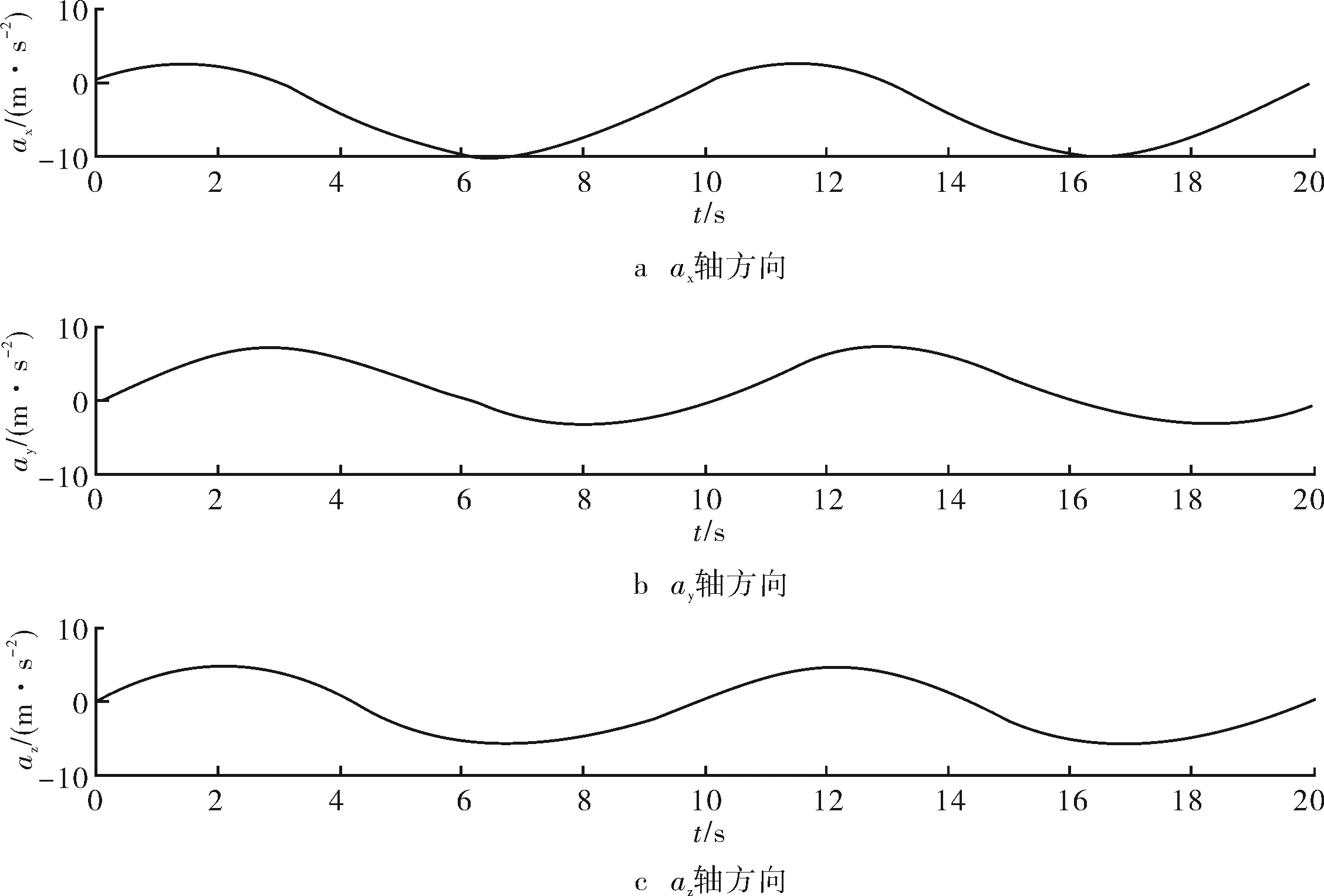
图8 加速度信号
图9为通过FFT变换和频域计算的方法求解出的位移随时间变化曲线。
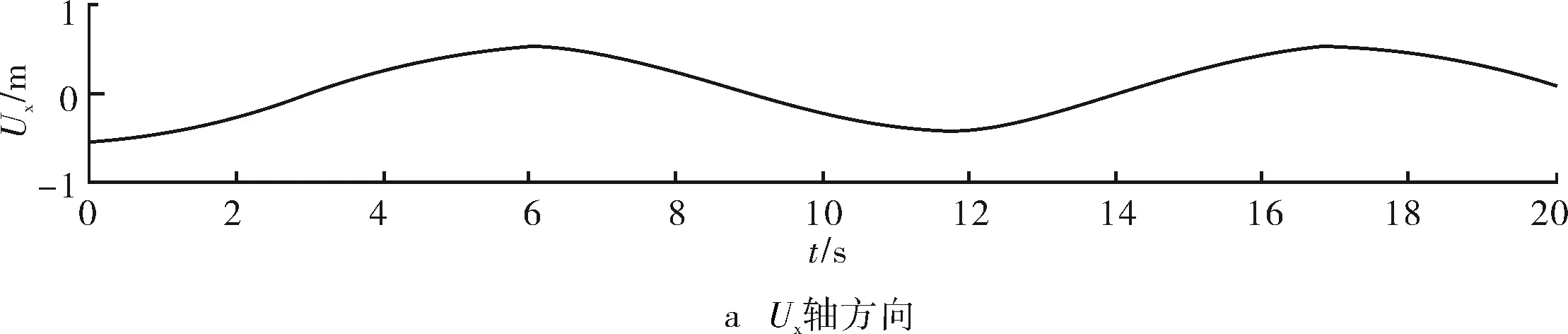
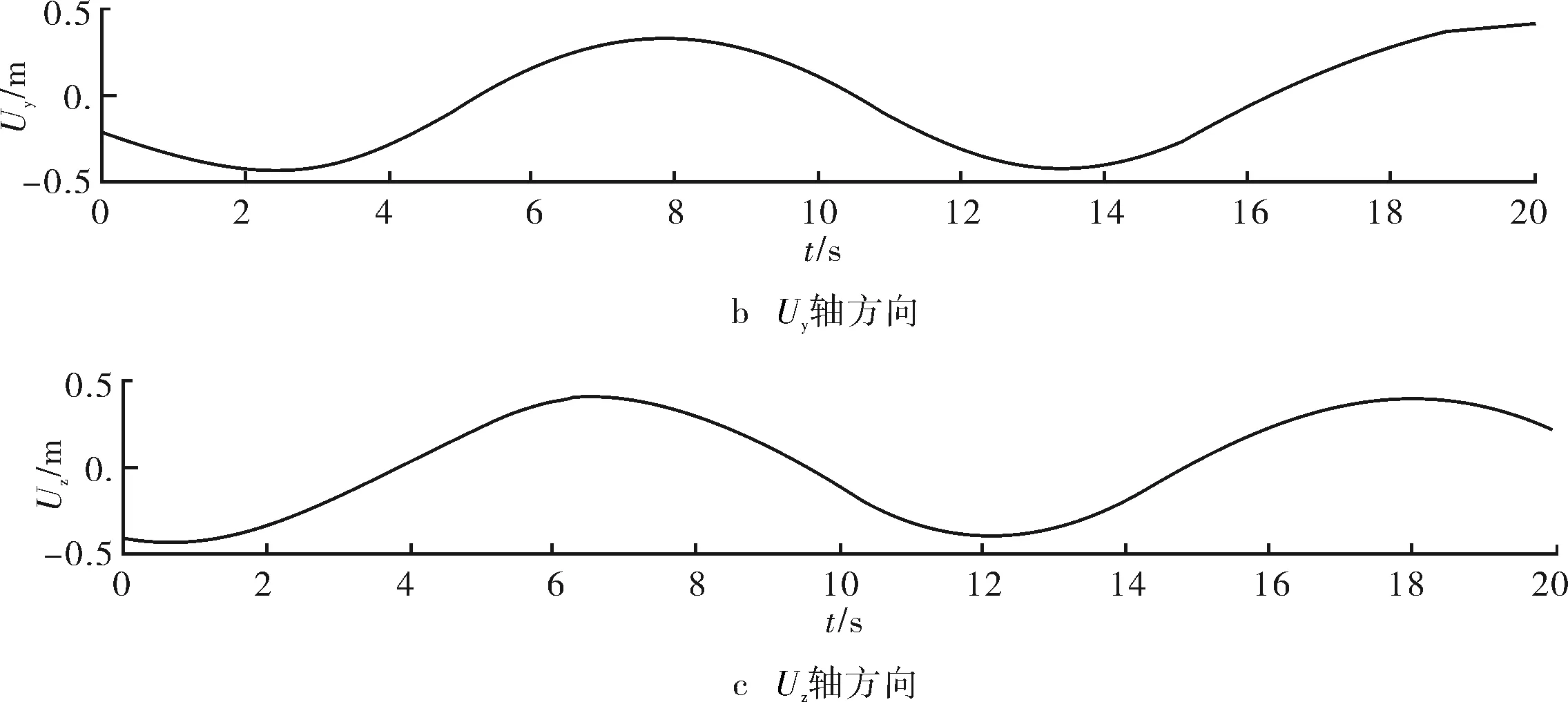
图9 位移信号
由计算结果可知,重力加速度总量在单一象限内随时间而周期变化。其中,重力加速度在x轴方向上的分量变化最大,在z轴方向上的分量变化最小。同时,对应的位移信号均随时间而周期变化,其中位移信号在z轴方向上变化最大,在x轴方向上变化最小,说明柔性管缆在垂直方向受到外载荷的影响最大。因此,在关于柔性管缆的防护工作中,应着重考虑垂直方向上的影响。
5 结语
本文应用四元数法和4阶Runge-Kutta法对柔性管缆进行姿态角更新求解,应用FFT变换和频域计算的方法推导出柔性管缆3个方向位移的计算公式,并运用MATLAB计算其位移值。该方法具有计算量小,运算快,程序简单等优点。通过对位移数据的分析,柔性管缆在垂直方向受到外载荷的影响最大,为柔性管缆弯曲强度和疲劳强度计算提供一定理论依据,也为柔性管缆的设计与防护提供数据支持。
猜你喜欢
小哥白尼(神奇星球)(2022年5期)2022-08-15
导航定位学报(2022年2期)2022-04-11
空间电子技术(2021年4期)2021-11-10
中华养生保健(2020年10期)2021-01-18
导航与控制(2020年3期)2020-09-09
中国民航大学学报(2020年2期)2020-06-15
科普童话·神秘大侦探(2020年3期)2020-05-11
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
