
西门子S7-300 PLC的电梯集群控制技术应用研究
2022-02-14 12:13王晨丰
自动化仪表 2022年1期
王晨丰
(商洛职业技术学院机电工程系,陕西 商洛 726000)
0 引言
西门子S7-300 PLC是一款具有稳定性高、抗干扰能力强、环境限制性小,灵活性高等特点的可编程逻辑控制器(programmable logic controller,PLC)[1],在工业控制等方面得到了较为广泛的应用。西门子S7-300 PLC拥有强大的中央处理器(central processing unit,CPU),经过快速、精准的内置运算,可以实现较高程度的系统控制[2-3]。电梯集群控制分为单个效能控制和整体运行控制。集群控制需实现对客户呼梯信息、电梯运行方向、开关门和运行始终层的有效控制[4-5]。因此,在西门子S7-300 PLC应用的基础上,通过对电梯集群控制系统中央CPU处理器计算模型及运行模型的研究,能在较高程度上实现电梯控制技术的提升。
1 电梯集群PLC控制系统设计
1.1 电梯集群PLC控制系统客流结构设计
基于西门子S7-300 PLC的电梯控制系统主要由信号控制系统和拖动系统组成。与继电器逻辑控制和计算机控制相比,西门子S7-300 PLC控制的效用更强,具有较强的抗干扰能力[6-7],运行故障率较低。中央控制功能完全由逻辑程序实现,占用存储空间较少,极大地提高了系统的灵活性[8]。信号控制系统结构按照功能可划分为运行方式、运行控诉、安全保护3个环节。基于西门子S7-300 PLC的电梯控制系统结构如图1所示。
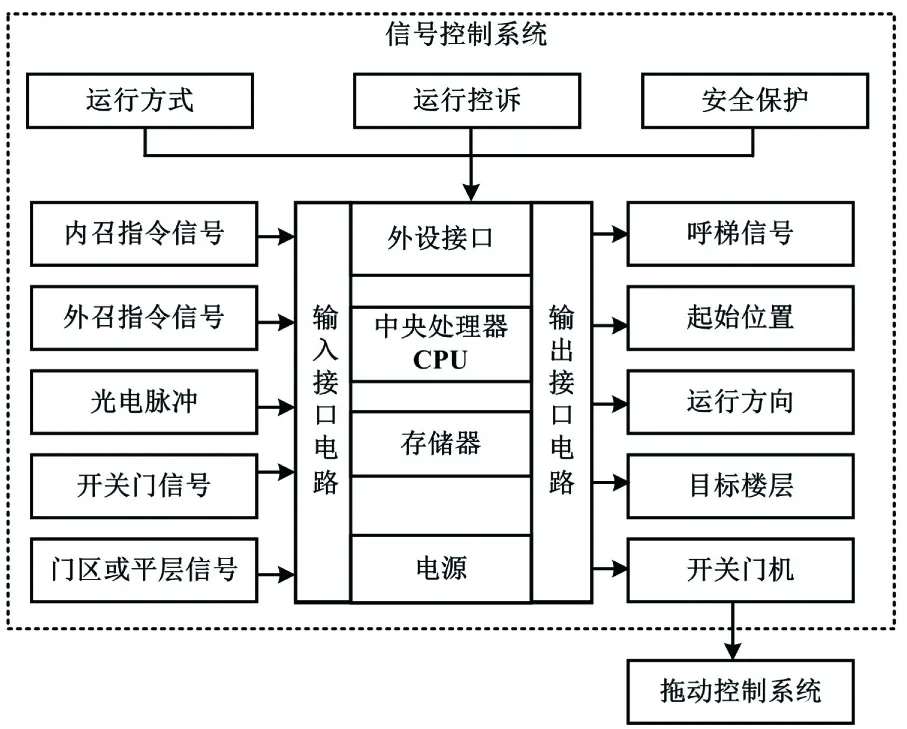
图1 基于西门子S7-300 PLC的电梯控制系统结构Fig.1 Structure of elevator control system based on Siemens S7-300 PLC
如图1所示,系统中信号的输入及输出都是由信号控制系统负责的,最终信号被传送至拖动系统。整个控制系统通过输入接口电路,使CPU接收信号并进行控制计算,然后通过输出接口电路将计算结果(即呼梯信号、起始位置、运行方向、目标楼层等信号)输出到最后的控制系统,并向开关门机发出开关门指令,以实现电梯的运行控制。
横向移动的乘客需要横移到目的井道后才能达到目标层,上、下移动的乘客仅需上、下移动指令即可到达目的地[9]。因此,需要对乘客类型进行辨别,并计算乘客的出行概率p。
(1)
式中:W、X、Y、Z分别为横移、上行、下行及层间乘客人数;E为考察时间段乘客的客流总量。
最后,利用蒙特卡洛法对乘客类型进行判断:按照乘客出行概率映射到[0,1]区间,并在区间内生成一个随机数R;通过对比出行概率值与随机数R,即可得出乘客的类型。
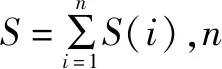
设定电梯水平移动的起始位置(即基站位置的乘客密度)为S(i),计算方如式(2)所示。

i=2,3,…,m
(2)
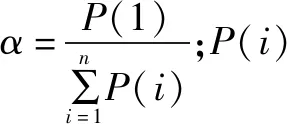
根据楼层起始密度结果可得其作为起始楼层的概率P(k),如式(3)所示。
(3)
相应地,各楼层被选为起始楼层的概率之和,如式(4)所示。

(4)
式中:Q(k)为各楼层被选为起始楼层的概率之和,k为起始楼层;n为总楼层数。
最后,利用蒙特卡洛方法,结合各楼层作为起始楼层总概率划分区间,可确定实际操作过程中乘客的起始楼层。将总概率映射为[0,1]区间的随机数R,判断随机数R所对应的累计概率区间,与该区间对应的楼层便是乘客的起始层。
用同样的方法确定乘客的目标层,如式(5)所示。
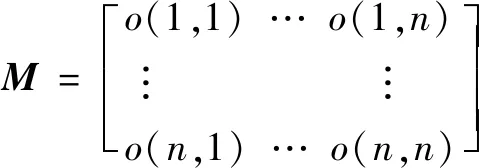
(5)
式中:M为起始层到目标层的密度矩阵;o为目标层的密度。
当乘客从第i层移动到第j层时,根据密度矩阵确定各层作为目标层的密度o(1,j),如式(6)所示。
(6)
式中:i、j分别为各楼层;X1为上行乘客占比;W1为横移乘客占比;P(j)为第j层乘客分布人数。
式(6)中,由于多路径电梯设置中既包括乘客横移运动又包括乘客上行运动,所以乘客目标层的密度计算分为乘客同层横移客流密度与横移上行密度。再次按照起始层的确定方法,在起始层与目标层分别为第i层到第j层时,计算目标层的到达概率,如式(7)所示。
(7)
由式(7)可得起始层与目标层分别为第i层到第j层时的累计概率,如式(8)所示。
(8)
式中:Qo(i,j)表示起始层与目标层分别为第i层到第j层时的累计概率。
最后,按照起始层的确定方法,运用蒙特卡洛方法确定乘客的目标层。
1.2 电梯集群PLC控制系统多路径跟驰模型设计
电梯集群控制中的安全保护措施是PLC控制系统中的重要环节[10]。对电梯保护系统进行多路径跟驰模型设计,能够有效避免电梯运行过程中因突发制动造成的车厢碰撞事故[11]。多路径跟驰模型设计的原则是有效保持多个车厢运行过程中的安全间隔,在前车厢出现制动的情况下,后车厢能够及时减速制动以避免碰撞[12]。电梯安全距离模型设计中包括无障碍自由行驶速度v1和前方有障碍紧急刹车速度v2。对v1和v2的机损计算分别如式(9)和式(10)所示。
v1(t+τ)=vn(t)+2.5anτ×
(9)
式中:v1(t+τ)为行驶速度v1的机损;n为车厢总数量;vn(t)为t时刻的行驶速度;an为车厢运行的最大加速度;bn为车厢运行最大减速度;Vn为车厢最大运行速度;t为运行时间;τ为车厢运行智能反应时间。
(10)
式中:v2(t+τ)为为行驶速度v2的机损;vn-1为车厢n运行过程中前一车厢的最大运行速度;bn-1为前一车厢运行最大减速度;θ为车厢n的刹车制动时间;t为运行时间;τ为车厢运行智能反应时间;xn(t)、xn-1(t)分别为t时间内第n节、第(n-1)节车厢的位置;Sn-1为第(n-1)节车厢离安全位置的距离。
为了保证车厢的运行安全,要在2种速度中选择最小运行速度,即vn(t+τ)=min(v1,v2)。多路径电梯跟驰模型如图2所示。
图2中:Sn-1为距离安全;xn为车厢n的位置;xn-1为车厢(n-1)的位置;xn+1为车厢(n+1)的位置;h为车厢高度;k为上下运行井道中车厢的最小间距;d为车厢的实际宽度;d2为车厢在横向移动运行中的最小间距。
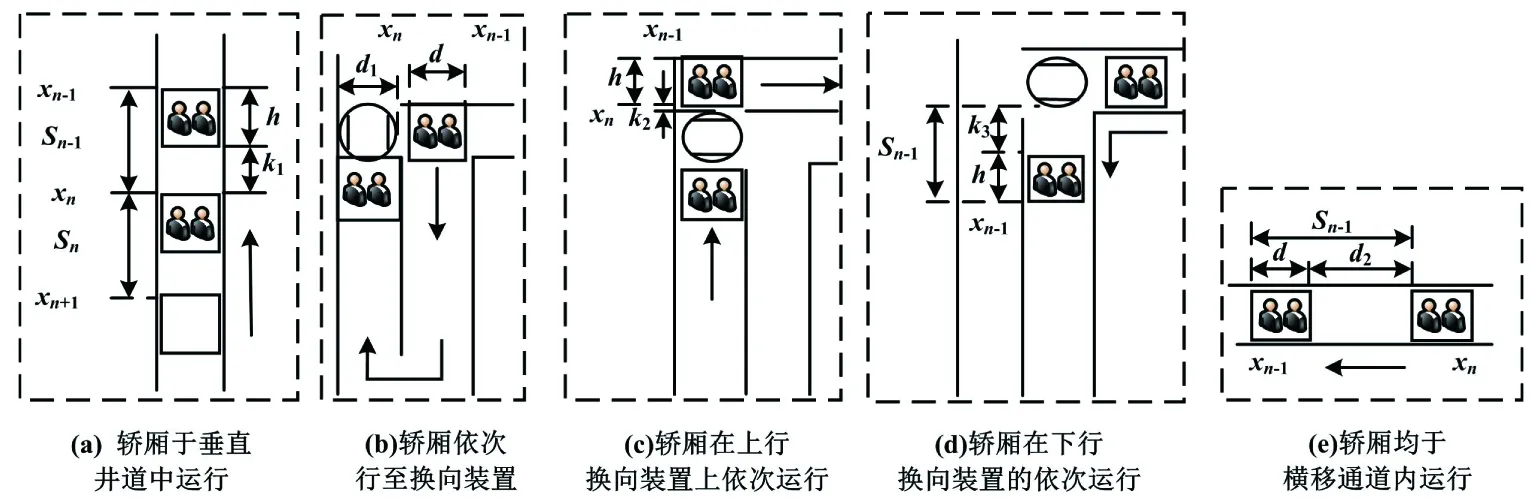
图2 多路径电梯跟驰模型Fig.2 Multi-path elevator follow-through model
跟驰模型设计可保证多路径电梯在垂直移动到既定顶端位置时,前后车厢正常运行、平稳过渡、不发生碰撞。在此过程中,安全距离Sn-1随着2个车厢间距离的变化而变化。图2(a)中,Sn-1=k1+h,k1为运行中垂直相邻的2个车厢最短距离。图2(b)中,Sn-1=d1+d。图2(c)中,Sn-1=k2+h,k2为垂直相邻的2台换向装置的最小间距。图2(d)中,Sn-1=k3+h,k3为垂直井道换向车厢与相邻层站之间的最小间距。图2(e)中,Sn-1=d2+d,横向移动的车厢安全距离设定原则与垂直井道相似。
电梯车厢运行安全设计中,除了要避免车厢因间距和速度问题发生碰撞以外,还需要考虑车厢在脱离或进入编队时的错位问题[13]。为了保证内循环与外循环车厢在共同井道中的安全、有序运行,对车厢编队策略进行了设计[14]。
车厢编队策略如图3所示。
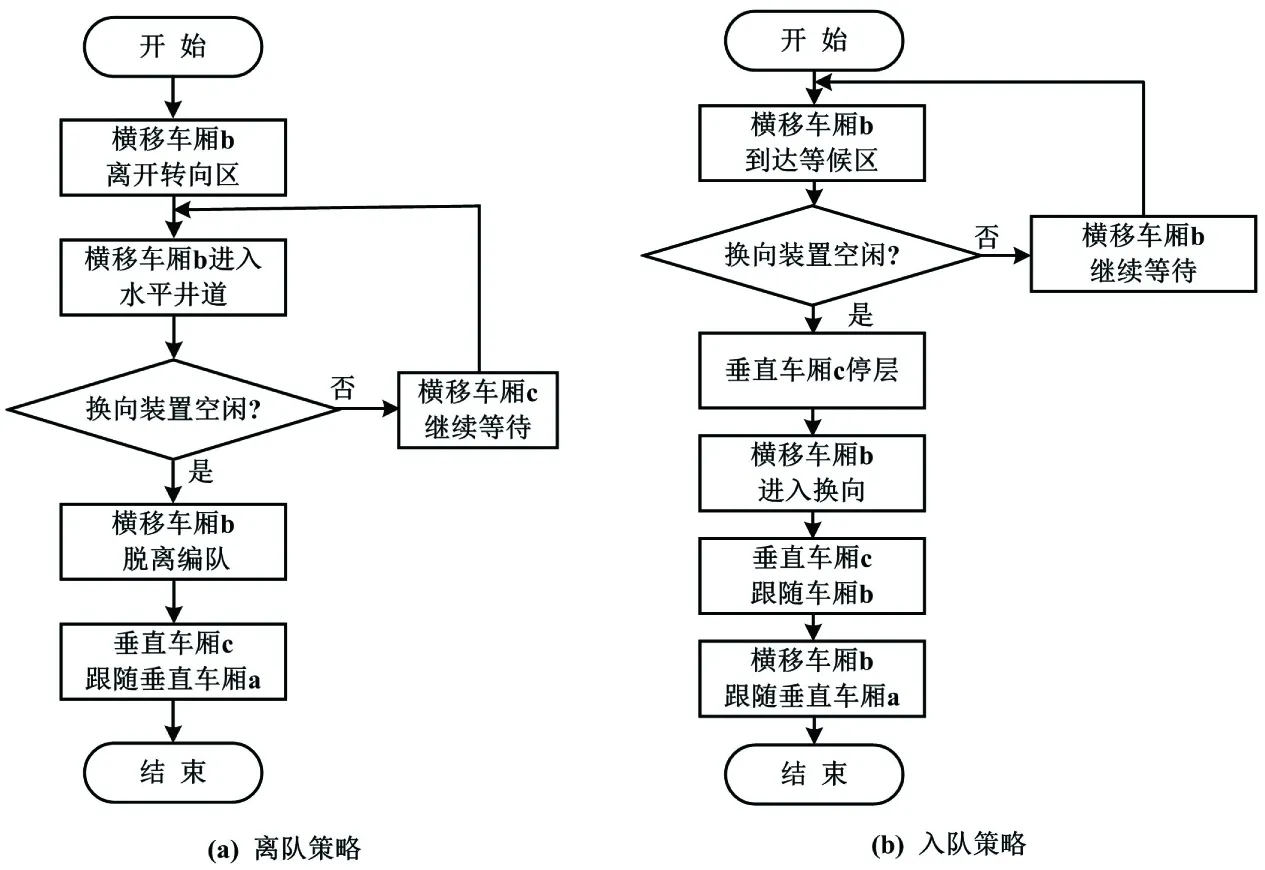
图3 车厢编队策略Fig.3 Carriage formation strategy
编队策略分为离队策略和入队策略。无论是入队还是离队,都遵循相似的原则。由图3(a)可知,车厢要实现离队,首先需要判断是否存在空闲装置。若存在,则车厢选择离队,下一个车厢跟随。由图3(b)可知,假设原始井道车厢按照车厢c→车厢b→车厢a的顺序有序运行,车厢b在垂直井道到达顶端时要发生横移变向,此时就需进行换向装置空闲程序设定,根据空闲情况决定车厢运行状态。若换向装置空闲则车厢c停层,车厢b进行换向,等待入队,车厢c跟随车厢b继续运行。反之,则整个车厢运行都停层,等待车厢b换向离队。
为了保证多路径电梯的运行效率,在电梯运行中还需对电梯的最短路径派梯过程进行控制。车厢的最短路径派梯策略如图4所示。

图4 车厢的最短路径派梯策略Fig.4 Shortest path assignment ladder strategy for carriages
如图4所示,S1、S2、S3、S4、S5、S6、S7分别为读取指令、乘客呼梯的信号、车厢位置检测指令、车厢停层指令、车厢换向指令、车厢位置检测指令、呼梯更新指令。车厢根据相关指令实现换厢以及上、下乘客等任务,并在任务完成后进行指令更新,保证每次载客都能够准确完成。经过最短路径设计的多路径跟驰模型能够在保证安全的前提下,实现最佳的运行效率[15]。
2 电梯集群PLC控制系统评测
2.1 电梯客流预测准确性评测
选定一栋8层的建筑样本,对电梯进行仿真模拟,以检验客流模型建构的准确性。以5 min为周期进行采样,对不同时间段乘客起始层与目标层的选择进行模拟仿真。按照相同步骤两次进行参数收集,生成如图5所示的电梯客流仿真数据。
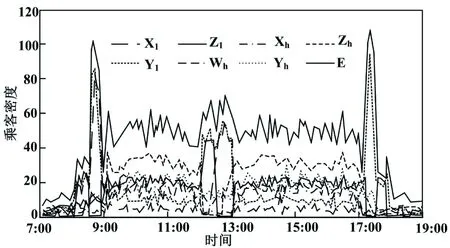
图5 电梯客流仿真数据Fig.5 Elevator passenger flow simulation datas
乘客密度高峰期一般为早上9∶00左右、中午12∶00以及下午18∶00。从图5中可以看出,仿真结果显示的客流量高峰期符合正常状态下的客流量分布。通过仿真分析可以看出,模拟仿真数据中的乘客人数及密度与参数数据一致。从仿真数据的随机性判断,较为符合真实的电梯服务过程。电梯呼梯显示、乘客起始层、目标层模型建构较符合电梯控制要求。
在多路径电梯客流设计基础上,随机选择120个小时的客流数据作为样本,对多路径电梯客流进行预测分析,以验证基于PLC智能识别系统的多路径电梯客流控制系统的精准度。700组多路径电梯客流数据分析结果如图6所示。

图6 700组多路径电梯客流数据分析结果示意图Fig.6 Analysis results of 700 sets of multi-path elevator passenger flow data
图6(d)中,8种交通模式分别为①空闲、②上班、③上班高峰、④工作层次、⑤午间下班、⑥午间上班、⑦下班、⑧下班高峰。如图6所示,系统在对客流量密度的预测中,预测值和实际值之间的拟合程度较高,存在较为明显的相似性。经计算,客流预测值交通模式识别精度高达97.51%,略高于交通模式识别系统的精度95.48%。由此表明,基于西门子S7-300 PLC智能识别系统的多路径电梯客流控制系统设计能够以较高的水平实现客流的精准预测,为电梯运行提供准确信号。由图6可知,无论是客流总密度、垂直客流密度、上行井道交通强度还是交通模式识别,其预测值与实际值之间只存在较小的误差,拟合度高达90.54%。该预测结果能够为电梯行为提供精准的数据支撑。
2.2 多路径电梯避撞策略效果评测
为验证多路径电梯避撞策略、编队策略设计效果,设定车厢a、车厢b以距离25 m为起点,车厢高度为2 m,车厢反应及刹车速度都为0.1 s,初始位置上车厢a为上行运行状态,车厢b处于停层状态,在250 s内进行仿真。多路径电梯避撞策略验证如图7所示。
由图7(a)可知,PLC控制系统可以在较大程度上实现对车厢速度的控制,使车厢长期处于平稳运行状态。车厢运行的最大加速度始终保持在±1 m/s2的范围内,平均制动时间在8.3~10.2 s之间,保证了车厢运行的安全性。由图7(b)可知,车厢到达指定换向高度后,能够在平均4 s的时间内完成换向动作,较大程度地减少了车厢的停层时间,提高了车厢的换向效率。

图7 多路径电梯避撞策略验证Fig.7 Validation of multi-path elevator collision avoidance strategy
图8所示为所有乘客的到达时间和效率对比检测结果。
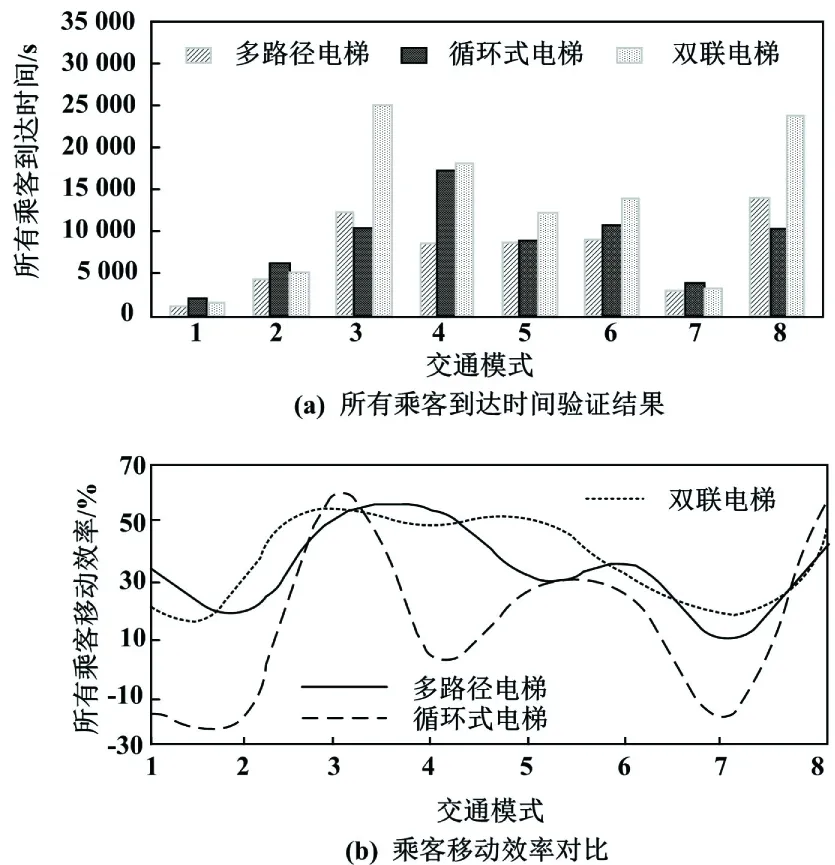
图8 所有乘客的到达时间和效率对比检测结果Fig.8 Comparative detection results of arrival time and efficiency for all passengers
图8中,8种交通模式同图6(d)。由图8(a)可知,基于PLC智能控制系统的多路径电梯设计,所有类型乘客的到达时间明显低于其他2种电梯乘客到达时间,平均时间缩短了10.21%,提高了电梯运行效率。由图8(b)可知,横移长度对多路径电梯运行效率具有较高程度的影响。在增加水平移动车厢的前提下,多路径电梯在上班高峰期的运行效率低于循环式多电梯。在保持参数不变的前提下,如增加车厢横移长度,多路径电梯的运行效率可以得到显著提升,其效率可长期提升至原来的140%~150%。由此表明,多路径电梯适用于长距离的横移场合,能够极大地提高电梯运行效率。
3 结论
基于PLC的电梯是一种智能化程度较高、占用空间较少且运行平稳度较高的新型电梯。基于西门子S7-300 PLC,设计了一套具有较高识别性能及安全性能的电梯控制系统,并对其进行模拟仿真和效果评测。评测结果表明:在经过研究改造之后的新型多路径电梯控制系统的客流预测精准度高达95.48%,与实际电梯运行拟合度达90.54%,实现了较高程度的客流信息控制;电梯平均制动时间为8.3~10.2 s,乘客到达时间平均缩短了10.21%,提高了电梯控制效果及运行效率。本研究的多路径电梯设计中没有关于具体层站的设置控制,在后期研究中还应增设停靠站点,以不断完善电梯功能。
猜你喜欢
中国交通信息化(2022年8期)2022-11-20
中学生博览·文艺憩(2022年4期)2022-06-21
青少年科技博览(中学版)(2021年9期)2021-12-21
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2021年15期)2021-10-14
商品与质量(2019年52期)2019-12-22
中国电气工程学报(2019年29期)2019-09-10
科技风(2019年36期)2019-01-13
读者(2019年2期)2019-01-05
中国科技纵横(2017年6期)2017-05-12
