
电梯柔性提升系统横向-纵向耦合动力学建模与仿真*
2022-03-06 08:40殷铭豪田健康徐家根
起重运输机械 2022年24期
殷铭豪 吴 晓,2 曹 丹 田健康 徐家根
1西南交通大学机械工程学院 成都 610031 2轨道交通运维技术与装备四川省重点实验室 成都 610031
0 引言
以钢丝绳、钢缆等作为提升载体的矿井提升机、曳引电梯、起重机等可统称为柔性提升系统,随着系统的运行,提升系统的刚度、质量、阻尼等参数不断发生变化[1,2]。国内外学者通常将该类结构转化为一端固定的轴向运动弦线[3,4]。高速运行过程中的系统对外界的干扰激励敏感,易发生振动,降低系统寿命甚至影响安全使用[5-7]。
国内外学者对柔性提升系统进行了一系列研究。Yong B G等[8,9]对摩擦提升系统中钢丝绳动力学及摩擦传递的耦合关系进行建模,分析系统横向振动的影响因素;郭瑜等[10]建立塔式摩擦提升系统动力学模型,分析该提升钢丝绳与尾绳的纵向振动;吴娟等[11]建立多绳摩擦提升系统,分析不同运行阶段对系统横向振动的影响;齐秀娟[12]建立高速曳引电梯横向振动模型,推导了曳引钢丝绳横向刚度公式,分析了曳引钢丝绳的最小刚度与位置;Zhang C Y等[13]建立了静止时电梯系统的集中参数离散模型,分析了系统发生振动的原因;Young M等[14]将电梯系统中钢丝绳视为多个带质量的弹簧阻尼器,建立了集中参数的多自由度模型;Lee Y M等[15]和Kang J K等[16]以电梯系统为研究对象,建立系统离散模型,提出一种可抑制电梯轿厢垂直振动的控制策略;冯子朔[17]建立考虑曳引轮两侧轿厢与对重的相互作用与曳引钢丝绳长度变化的离散模型,分析了不同因素对曳引电梯运行及制动的影响。
将柔性提升系统简化为集中参数的离散模型,忽略了系统运行过程中提升钢丝绳的参数变化,系统低速运行时,钢丝绳的惯性影响较小,可高效分析该类系统的动力学特性,但是当系统高速运行时,运行状态参数变化较快,故提升钢丝绳对系统的振动影响不容忽视。本文基于能量法和Hamliton原理建立柔性提升系统横向-纵向耦合振动方程,考虑系统悬挂平衡绳以及实际受力影响,使用Matlab软件分析系统有平衡绳与无平衡绳时的振动响应,分析导轨不平顺激励对系统振动的影响。
1 柔性轴向运动系统振动控制模型
变长度轴向运行系统如图1a所示,悬挂重物之间采用平衡绳连接,将该系统简化为如图1b所示的柔性轴向运动系统,重物之间的平衡绳以图1所示张紧绳与弹簧阻尼器模拟,张紧绳的状态由张紧轮控制。导靴装置简化为重物与导轨之间的弹簧阻尼器,其刚度为k1,阻尼为c1,提升钢丝绳的长度为l(t),线密度为ρ1,分布阻尼为c,t时刻x处的横向振动与纵向振动分别为w(x,t)和u(x,t),下端张紧绳的长度为H-l(t),线密度为ρ2,H为建筑高度。为分析系统顶端曳引轮对系统的影响,假设顶端存在横向激励e1(t)。

图1 柔性轴向运行系统简化模型
本文中模型的建立原则为:1)忽略井道内空气气流与张紧绳振动的影响;2)提升钢丝绳纵向振动与横向振动的变形数值均远小于系统的长度;3)系统运行过程中钢丝绳的各项结构参数不会发生变化。
系统运行过程中提升钢丝绳x处的位移R与速度V为
当x=l(t)时,式(1)为重物的位移与速度,微分算子为
由式(1)可得系统的动能为
为方便表达,下文将使用u和w分别表示系统t时刻x处的纵向振动与横向振动,下标x与t分别为对其求偏导。
提升钢丝绳x处的张紧力为
式中:F为保持张紧状态的张紧力。
运行过程中系统的势能为
式中:ε为钢丝绳的正应变[18],k为钢丝绳的曲率[19]。
系统中阻尼做的虚功为
由Hamliton原理,将系统的动能、势能、虚功代入可得
系统运行过程中的边界条件为
将式(8)整理可得系统的横向-纵向振动偏微分方程。
由于顶端曳引轮横向激励的作用,横向振动位移w可表示为
式中: 为满足齐次边界条件的解, 为不满足齐次边界的解。
2 系统离散化求解
采用Galerkin法将系统振动控制方程转化为常微分方程,定义ξ=x/l(t),将变量x的时变域[0,l(t)]归一化为固定域[0,1],设系统的振动控制方程解可表示为
式中:i=1、2、3、…、n,n为模态截断阶数;φi(ξ)为型函数;pi(t)和qi(t) 为只与时间相关的广义坐标。
将式(13)代入式(11)和式(12)可得到激励作用下系统的纵向-横向振动偏微分方程。将式(13)按照振动控制方程中各项偏导数进行展开后代入式(10)和式(11),可将系统的横向-纵向振动偏微分方程转化为时变系数的常微分方程
式中:Pw和Qw为广义坐标向量,Mu、Mw为系统的质量矩阵,Cu、Cw为系统的阻尼矩阵,Ku、Kw为系统的刚度矩阵,Fu、Fw为系统的广义力向量,SPu、SPw为系统的耦合项。
各项表达式为
3 提升钢丝绳振动响应仿真分析
高速曳引电梯作为典型的柔性提升系统,参数变化快,运行过程中提升钢丝绳的长度不断发生变化,系统的刚度、阻尼、质量的参数均会发生变化。以高速曳引电梯为例分析提升系统的横向-纵向耦合振动特性。高速曳引电梯的最大行程lmax=175 m,额定速度vmax=6 m/s,最大加速度amax=0.75 m/s2,最大加加速度jmax=0.75 m/s3,运行时间为36 s。图2为高速曳引电梯运行状态曲线。高速曳引电梯中单根钢丝绳的提升质量m=450 kg,钢丝绳线密度ρ1=0.575 kg/m,抗弯刚度EI=22.16 N•m2,抗弯刚度ES=4.72 MN,导靴刚度k1=1×105N/m,阻尼c1=500 N•s/m,张紧绳线密度ρ2=0.490 kg/m,绳头弹簧刚度k1=1×105 N/m,阻尼c1=50 N•s/m,张紧力F=500 N。根据GB/T 8903—2018《电梯用钢丝绳》[20],该规格的钢丝绳最小破断拉力Fmin=74.3 kN,安全系数应≥12。

图2 高速曳引电梯运行状态
张紧力F通过式(15)验证,满足国家标准。
以上述参数为输入,使用Matlab软件对系统振动控制方程进行分析,图3和图4分别为重物底部有平衡绳与无平衡绳的系统横向振动位移响应与加速度响应。由于平衡绳的影响,上行时横向振动位移响应幅值由0.536 mm降低至0.524 mm,加速度响应由0.22 m/s2减小至0.173 m/s2,下行时的振动位移响应幅值降低了0.12 mm,加速度响应仅降低0.008 m/s2。图5和图6为分别为2种情况的纵向振动,由于底部平衡绳的质量以及张紧力的关系,系统纵向受力变大,纵向振动加速度更为剧烈,振动加速度幅值达0.91 m/s2随后在4 s内降低至0.5 m/s2,振动位移变化较小。提升系统底部安装平衡绳可抑制系统的横向振动,但会使系统的纵向振动更为剧烈。分析发现,系统上行时的振动响应幅值比下行时的振动响应幅值大,系统在下行时,系统的振动频率与幅值不断下降,上行时的振动频率与幅值不断增加。由于提升钢丝绳的结构特点,钢丝绳在系统停止运行后,存在少量的残余振动,系统轴向的残余振动更为明显,由于平衡绳的影响,系统的纵向振动位移残余响应由0.4 mm增加至3.85 mm。

图3 无平衡绳的系统横向振动位移与加速度响应

图4 有平衡绳的系统横向振动位移与加速度响应

图5 无平衡绳的系统纵向振动位移与加速度响应

图6 有平衡绳的系统纵向振动位移与加速度响应
4 导轨不平顺振动响应分析
导轨作为提升系统的导向装置,是不平顺时系统振动的主要激励源,导轨支架与连接板的安装失误将会导致导轨出现文献[21]中描述的失调激励ec(t),如图7所示,失调激励的数学表达式为
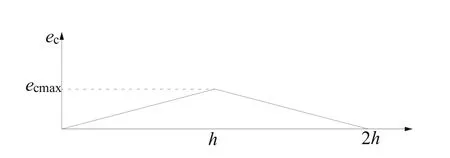
图7 失调激励
式中:e为失调激励幅值,ecmax=0.5 mm;h为单根导轨长度;n为导轨数量。
将导轨不平顺激励视为外力作用在系统导靴装置上,将不平顺激励化为对导靴的力学参数。此时系统中阻尼做的虚功变为
同时,系统的张紧力变为
式中:μ为滑动摩擦系数。
将式(20)与式(21)代入式(6)和式(9),可得到系统在导轨不平顺激励下系统的振动控制方程。系统具体结构参数如文前所述,单根导轨长度为5 m,由系统的行程可知两侧均需采用36 根导轨。
图8和图9分别为导轨失调不平顺激励的系统位移与加速度响应。由图4和图8可知,在导轨不平顺处系统的横向振动位移较大且存在突变,振动位移响应突变幅值为5.1 mm,加速度响应较为剧烈,由图6和图9可知,导轨不平顺对系统的纵向振动响应无影响。

图8 失调激励对系统横向振动的影响

图9 失调激励对系统纵向振动的影响
5 结语
本文针对柔性提升系统轴向运动的时变特性考虑平衡钢丝绳及其张紧力的影响,根据运动过程中提升钢丝绳的非线性特征,基于Hamliton原理建立横向-纵向耦合振动控制方程。以高速曳引电梯为例,将拟合的运行状态参数作为振动方程的输入条件,采用Matlab软件对有无平衡绳的系统进行振动响应分析。结果表明:有平衡绳的系统横向振动位移、加速度响应幅值均有明显降低,其中系统上行时的横向振动加速度响应降低20%,下行时降低5%。平衡绳及其张紧力会增加系统的纵向受力,导致系统的纵向振动位移、加速响应幅值较大,系统停止运行后的残余振动响应为3.85 mm。导轨不平顺会引起系统横向振动出现突变,且系统在突变处的振动较为剧烈,振动幅值为5.1 mm;导轨不平顺对系统的纵向振动影响较小,故在设计提升系统时应对运行导轨的不平顺问题加以控制。上述研究结果可为电梯柔性提升系统及相似系统的振动控制与振动特性研究提供一定的参考。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
装备制造技术(2020年2期)2020-12-14
中国特种设备安全(2019年11期)2020-01-16
中国特种设备安全(2019年7期)2019-09-10
今日农业(2019年12期)2019-08-15
中国特种设备安全(2018年12期)2018-03-15
新能源科技(2018年10期)2018-02-15
质量技术监督研究(2017年4期)2017-05-07
工业设计(2016年5期)2016-05-04
制造技术与机床(2015年10期)2015-04-09
