
侧滑打滑时的WMR抗饱和模糊超螺旋滑模控制
2022-03-15 09:45李振阳董方明佃松宜
计算机仿真 2022年2期
李振阳,董方明,佃松宜,赵 涛
(四川大学电气工程学院,四川 成都 610065)
1 引言
轮式移动机器人(Wheeled Mobile Robot,WMR)广泛应用于工业制造、航空航天以及服务业中,而轨迹跟踪控制是WMR的核心控制问题,吸引了大量学者进行相关方法的研究。目前,针对WMR的轨迹跟踪控制方法,主要有反演控制[1]、自适应控制[2]、模糊控制[3]、神经网络控制[4]以及滑模控制[5]。上述文献提出的方法,均假设WMR满足理想的纯滚动非完整约束。但在实际应用中,当WMR在湿滑地面运动或者急速转弯时,可能出现侧滑和纵向打滑现象,破坏理想非完整约束。
目前,针对理想非完整约束的WMR轨迹跟踪问题已经有大量的研究成果,然而针对具有侧滑、纵向打滑干扰下的WMR轨迹跟踪问题的研究还较少。文献[6]考虑WMR轮子的纵向打滑,设计了基于滑模观测器的运动学轨迹跟踪控制器,但其仅在运动学层面进行控制律设计,忽略了WMR的动力学属性。文献[7]提出一种基于广义扩张状态观测器的鲁棒控制方法,但其需要系统扰动的上界信息。文献[8]设计一种模糊干扰观测器,对WMR的侧滑和打滑干扰进行观测,但该方法对外界不确定扰动考虑不足。文献[9]采用神经网络对侧滑和打滑干扰进行逼近,结合强化学习机制实现轨迹跟踪控制,但该控制器设计复杂,难以用于实时控制。文献[10-11]提出一种基于自抗扰思想的动力学控制器,通过线性扩张状态观测器对WMR系统总体不确定性进行估计,但其轨迹跟踪初期具有较大的力矩跳变,对执行器的损害较大。
上述文献在理想非完整约束的基础上,进一步研究了WMR的侧滑、打滑干扰,但均未考虑WMR执行器的饱和约束问题。而在实际控制过程中,执行器的饱和约束是不可忽略的。如果设计的控制器输出量大于执行器能够承受的上界值,则容易造成执行器的损坏,导致整个控制系统失效[12]。综合上述分析,本文设计一种抗饱和模糊超螺旋滑模控制方法,相较于文献[6]-[11],所提出的控制方法不仅考虑了WMR轨迹跟踪过程中未知上界的侧滑打滑干扰和外界扰动,同时能够处理WMR的执行器饱和约束问题。
本文的贡献及创新点主要有:1)建立具有侧滑打滑干扰以及执行器饱和约束的WMR模型,相较已有的研究,更贴近实际应用;2)设计具有饱和约束系统的WMR动力学控制器,实现WMR在执行器饱和约束条件下的抗饱和控制;3)设计超螺旋滑模控制律,减小系统控制力矩中的抖振现象,并设计模糊系统对超螺旋控制律中的参数进行在线自适应调整,增强控制器在WMR系统扰动上界未知时的抗扰能力。
2 模型分析
图1为包含侧滑、打滑干扰时的WMR示意图。其中X-O-Y为全局坐标系,XC-C-YC为WMR的局部坐标系,b为轮子与质心之间的距离,r为轮子的半径,C为WMR的质心,v和ω分别为线速度和角速度,vyc为侧滑速度,ξr和ξl为轮子纵向打滑角速度扰动。
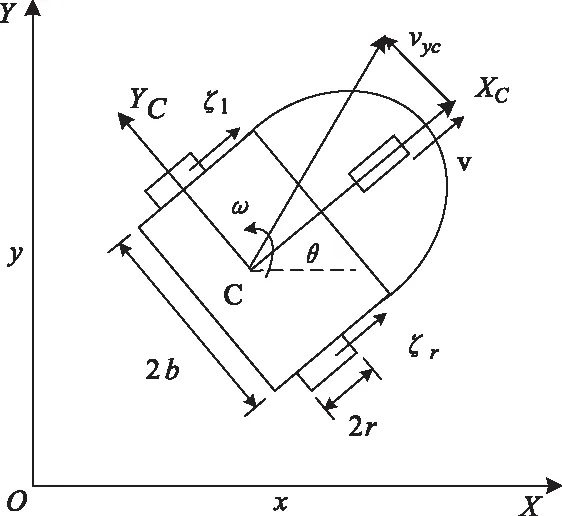
图1 WMR示意图
设WMR在坐标系X-O-Y中的位姿向量为q=[x,y,θ,θr,θl]T,存在侧滑、纵向打滑时的非完整约束方程为
(1)
其中(x,y)为质心C在坐标系X-O-Y中的坐标,θ为转向角,θr和θl为驱动轮转动角度。
简化式(1),非完整约束方程可以表示为
(2)
其中
Λ=[vyc,-rξr,-rξl]T.
定义矩阵S(q)如下,其满足A(q)S(q)=0。
(3)
由式(2)和(3),得到侧滑、纵向打滑时的WMR运动学方程
(4)
其中
z=[v,ω]T,ζ=[ζv,ζw]T
其中z=[v,ω]T为WMR的线速度和角速度,ζv和ζω为纵向打滑扰动,ψ(q,vyc)为侧向滑动造成的干扰。由文献[11]可知,干扰ζv,ζω,ψ(q,vyc)均有界,并且其一阶导数也有界。
根据拉格朗日动力学方程,WMR动力学模型可以表示为
(5)
其中M(q)∈5×5为惯性矩阵,5×5为科氏矩阵,G(q)∈5×1为重力项,B(q)∈5×2为变换矩阵,τ∈2×1为力矩项,η为拉格朗日算子。
对式(3)求导,代入式(5),左乘S(q)T,考虑模型不确定性和外界干扰,则动力学模型为
(6)
其中
m=mc+2mw,I=Ic+2Im+2mwb2
其中mc、mw、Ic、Im、Iw为WMR相关物理参数。D为系统总扰动,与侧滑打滑干扰、外界扰动和模型不确定性有关,具体形式为:


(7)
饱和约束函数为
(8)
则考虑执行器饱和约束条件时,式(6)所示的动力学模型可以改写为
(9)

3 控制器设计
为降低整个WMR系统控制器的设计复杂度,本文采用反演法设计WMR轨迹跟踪控制器,即把WMR分为运动学和动力学两个子系统,分别设计运动学辅助控制器和动力学控制器。
3.1 运动学辅助控制器设计
根据WMR的运动学模型(4)可知,WMR可以通过线速度和角速度调整,实现轨迹调整,因此运动学控制器需输出合适的速度控制律,使轨迹跟踪误差收敛于零。首先设WMR在坐标系X-O-Y中跟踪的参考轨迹qr=[xr,yr,θr]T为
(10)
其中vr、ωr分别为参考线速度和角速度,且有vr>0.
结合WMR的实际轨迹q和参考轨迹qr,可以推导出轨迹跟踪误差qe为:
(11)
对式(11)求导可得qe的动态方程
(12)
根据qe的动态方程,设计WMR的运动学辅助控制器[1]

(13)
式(13)中,kx>0、ky>0、kθ>0为WMR运动学辅助控制器参数。vc和ωc分别为运动学辅助控制器得到的虚拟线速度和角速度。
3.2 动力学控制器设计
根据WMR的动力学模型式(9),本文设计的WMR动力学控制器,以运动学控制器的输出zc作为参考输入,得到力矩控制输出,实现WMR的速度跟踪。动力学控制器的设计步骤为:1)抗饱和辅助系统设计;2)抗饱和超螺旋滑模动力学控制器设计;3)抗饱和模糊超螺旋滑模动力学控制器设计。
3.2.1 抗饱和辅助系统设计
根据式(7)-(9)可知,WMR的执行器存在饱和约束,执行器输出不能超过最大输出值τmax,因此需要设计抗饱和辅助系统,实现WMR的执行器饱和补偿。抗饱和辅助系统设计如下
(14)
式(14)中,λ=[λ1,λ2]T为辅助系统的状态变量,H为式(9)中的参数矩阵,Δτ为式(7)所示的饱和约束误差,矩阵A为
为保证WMR的抗饱和辅助系统(14)稳定,矩阵A需满足Hurwitz条件,即a1>0,a2>0[12].
3.2.2 抗饱和超螺旋滑模动力学控制器设计
根据WMR运动学辅助控制器输出zc和抗饱和辅助系统状态变量λ,定义WMR的速度跟踪误差ze
(15)
其中v和ω分别为WMR的实际线速度和角速度。根据WMR速度跟踪误差ze,构建积分滑模面

(16)
其中β>0为滑模面参数。为了设计WMR动力学控制器中的滑模控制律,需推导滑模面的导数,结合式(7)、式(9)、式(14)和式(15),有

WMR的滑模动力学控制律分为等效控制律和切换控制律,设计如下
1)等效控制律

(18)
2)切换控制律
等效控制律τeq能在不考虑WMR系统总扰动的条件下,使系统状态保持在滑模面上。但WMR系统的总扰动不可忽略,需要引入切换控制律,补偿系统总扰动D.为了克服传统滑模控制中广泛存在的抖振现象,采用超螺旋滑模控制律[13]作为WMR的切换控制律
(19)
结合τeq和τsw,得到WMR的抗饱和超螺旋滑模动力学控制器
(20)
3.2.3 抗饱和模糊自适应超螺旋动力学控制器设计

为解决控制器(20)在D未知时参数选择困难的问题,设计模糊系统,估计WMR超螺旋滑模控制律的参数K1和K2.以用于1估计的模糊系统为例,具体设计步骤为:
1)WMR滑模面模糊化
以式(16)构建的WMR滑模面si作为模糊系统的输入,通过如下的模糊规则进行模糊化处理

2)解模糊输出控制器参数
采用权值平均法解模糊,得到模糊系统的清晰化输出,即WMR超螺旋控制律的参数k1i:
(21)

通过上述模糊系统对WMR超螺旋滑模控制律中的控制参数进行估计,设1和2分别为模糊系统对WMR超螺旋滑模动力学控制器参数的估计值,表达式如下

(22)
(23)
由此可在式(20)的基础上,进一步得到WMR的抗饱和模糊超螺旋滑模动力学控制器
(24)

(25)
(26)
式中:αi>0和βi>0为学习率参数。结合WMR的运动学辅助控制器,整个控制框图如图2所示。
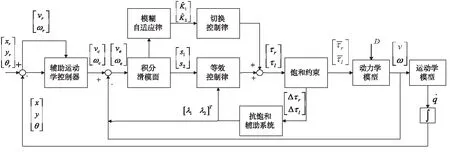
图2 控制系统框图
4 稳定性分析
本节基于Lyapunov稳定性理论,对设计的WMR轨迹跟踪控制器进行稳定性分析。
定理:采用运动学辅助控制律式(13)、抗饱和模糊超螺旋滑模控制律式(24)和模糊超螺旋自适应律式(25)~(26),可以保证WMR的轨迹跟踪误差qe和速度跟踪误差ze渐进稳定。
证明:设计Lyapunov函数为
V=V1+V2
(27)
其中V1用于分析WMR运动学控制器式(13)的稳定性,V2用于分析WMR动力学控制器式(24)的稳定性,具体表达式为
(28)
(29)
1)WMR运动学控制器稳定性分析
V1对时间求导,将式(12)~(13)代入,则
(30)

2)WMR动力学控制器稳定性分析
V2对时间求导,将式(22)~(24)代入,有
(31)

将式设计的模糊系统参数自适应律(25)、(26)代入式(31)中,可以得到

≤0.
(32)
综上,设计的控制系统可以保证WMR的轨迹跟踪误差qe和速度跟踪误差ze渐进稳定。证毕。
5 仿真研究
为验证本文所提出控制方法的有效性,通过Matlab进行仿真研究。WMR模型参数为
mc=2kg,mw=0.5kg,b=0.15m,r=0.05m,Ic=0.0675kg·m2,Im=0.0125kg·m2,Iw=0.01125kg·m2.
运动学辅助控制器参数为:kx=8,ky=10,kθ=10.模糊系统采用三个三角隶属度函数,如图3所示。滑模面参数为β=7,模糊自适应律学习率参数为:α1=15,α2=5,β1=80,β2=100.模糊系统的参数向量k1i、k2i初始值取0.01.抗饱和辅助系统的参数取a1=a2=10,λ1和λ2的初始值取0.01.执行器的饱和约束取τmax=8N·m.
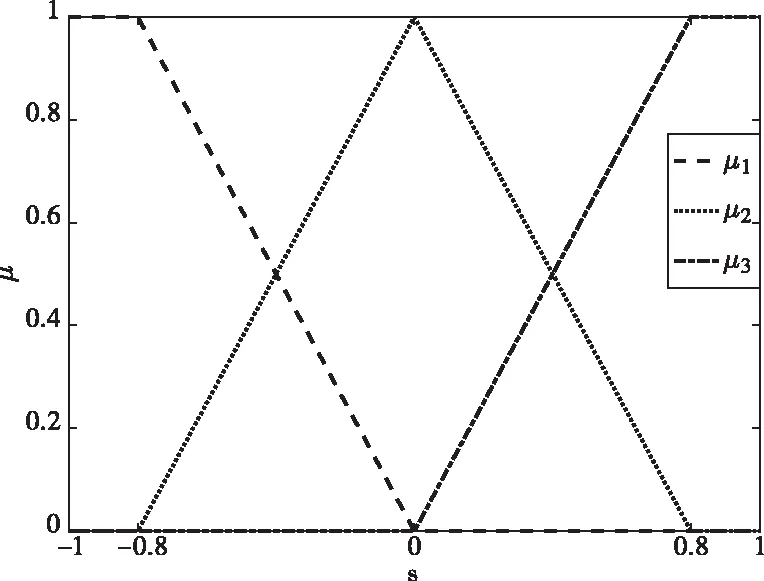
图3 三角隶属度函数
参考速度取vr=1m/s,ωr=0.5rad/s,初始位姿取qr=[1.2,0.8,0]T;实际初始位姿为取q=[0,0,0]T,初始速度取v=0m/s,ω=0rad/s.
为了验证所提出的模糊超螺旋滑模控制方法不需要系统扰动的上界信息,在仿真中加入不同上界值的扰动:当t<15s时,不考虑侧滑和打滑,仅取:Τd=[Td1,Td2]T=[2sin(t),2sin(t)]T.
当t≥15s时,加入侧滑和打滑,取横向滑移速度为vyc=1m/s,纵向打滑角速度扰动取为:ξr=sin(t)、ξl=sin(2t)+0.5.并且取较大的扰动:Τd=[Td1,Td2]T=[12sin(t),15sin(t)]T.
与固定增益的等速趋近律滑模控制器和超螺旋滑模控制器进行对比。固定增益等速滑模控制器参数选取Γ=diag{5,5},固定增益超螺旋控制器参数选取为:K1=diag{5,5},K2=diag{5,5}.
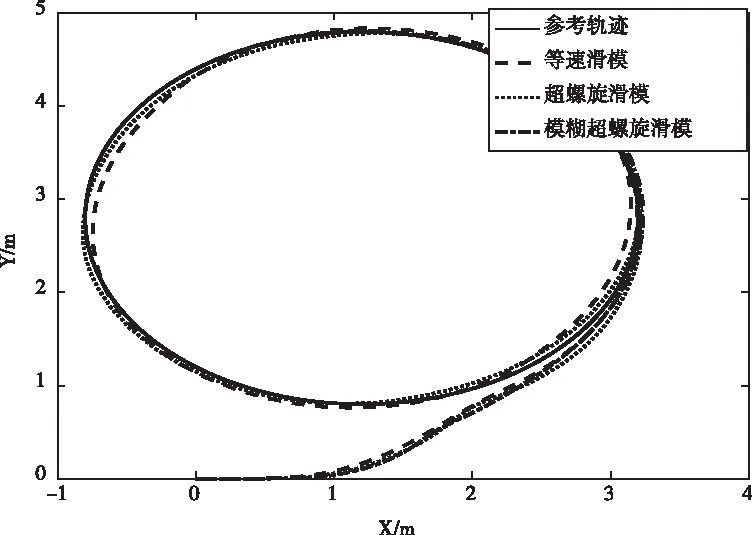
图4 轨迹跟踪曲线

图5 X轴误差
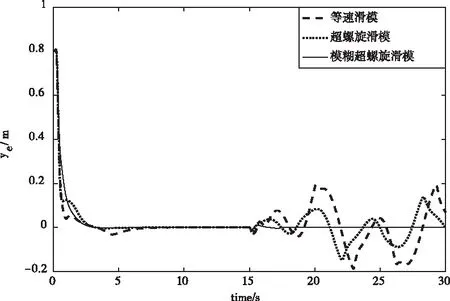
图6 Y轴误差
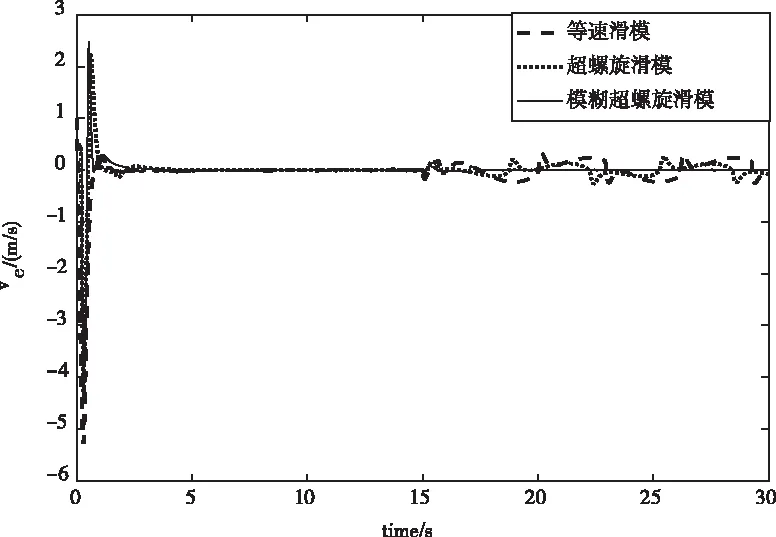
图7 线速度误差
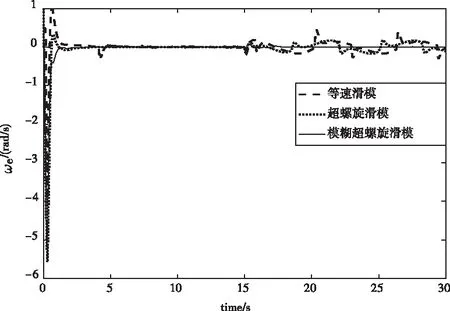
图8 角速度误差
图9~图10分别为WMR的左、右轮力矩曲线,可以看出,通过设计的抗饱和辅助系统,能够将执行器的输出力矩约束在[-τmax,τmax]以内。同时可以发现,超螺旋滑模控制律为正弦型连续控制量,相比于等速滑模,有效的削减了控制量中的抖振。
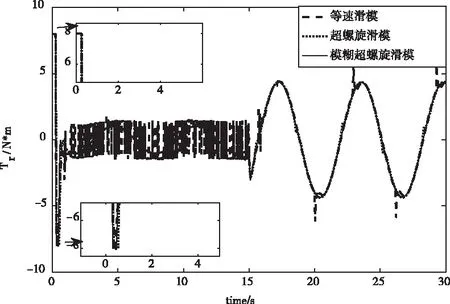
图9 右轮驱动力矩
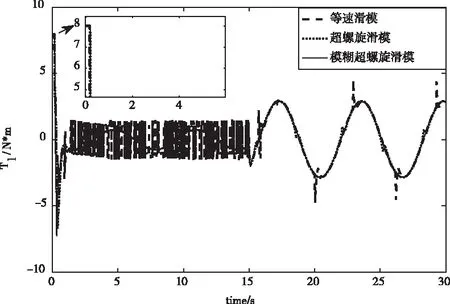
图10 左轮驱动力矩
采用平方误差积分(ISE)、绝对误差积分(IAE)和时间乘绝对误差积分(ITAE)对轨迹、速度跟踪性能进行评价,表达式如下。表1~4分别给出了三种控制方法的指标对比,可看出,相较于其它两种控制方法,本文提出的方法具有最优的性能指标,跟踪性能更好。
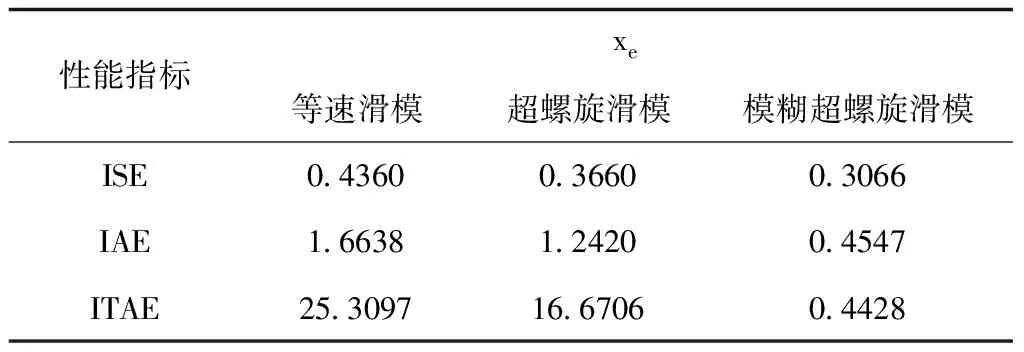
表1 X轴跟踪性能指标


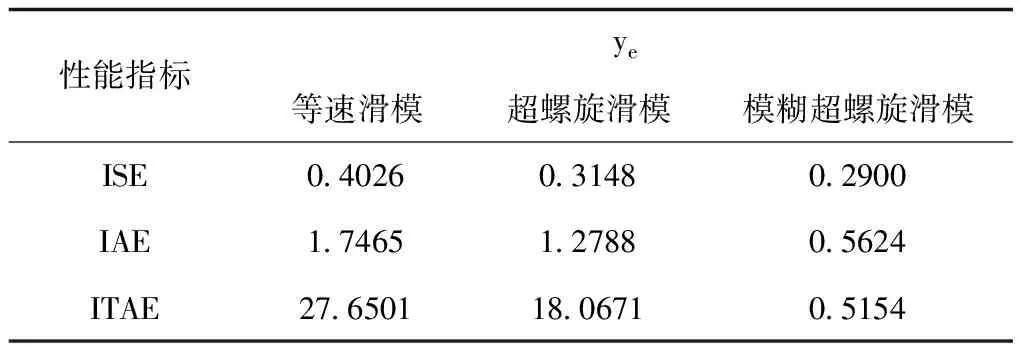
表2 Y轴跟踪性能指标
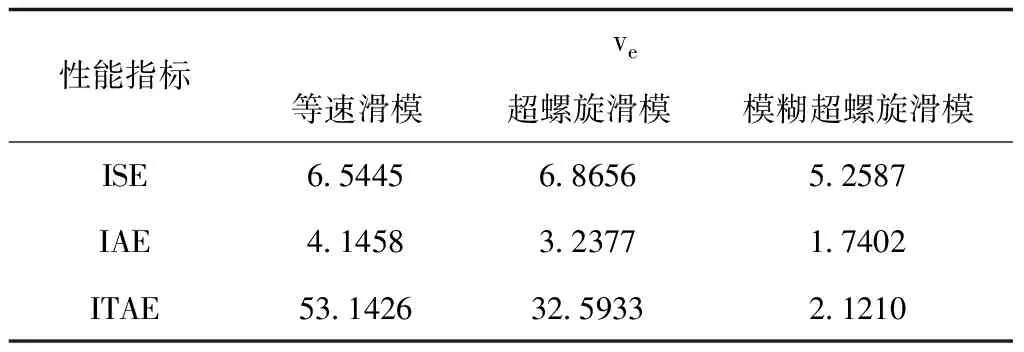
表3 线速度跟踪性能指标
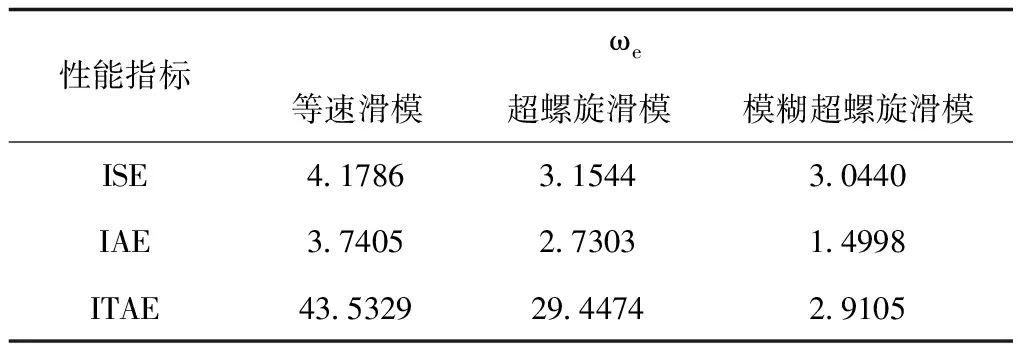
表4 角速度跟踪性能指标
6 结论
本文针对WMR在侧滑、打滑干扰和执行器饱和约束条件下的轨迹跟踪问题,提出一种抗饱和模糊超螺旋控制策略,通过仿真研究与分析,主要有以下结论:
1)设计的饱和约束辅助系统,能将力矩控制量限制在执行器最大输出值以内,避免WMR轨迹跟踪初期出现较大的力矩跳变,实现WMR的抗饱和控制;
2)设计的模糊超螺旋滑模控制律,能克服上界未知的WMR系统扰动,当轨迹跟踪过程中扰动发生突变、上界改变时,模糊参数自适应律能使轨迹跟踪误差和速度跟踪误差始终收敛;控制量连续且无抖振;
3)在对比仿真研究中,通过误差性能指标定量分析三种不同控制策略的跟踪控制性能,可以得出,所提出的控制策略具有更高的跟踪精度。
后续工作的重点是结合实际的WMR和嵌入式控制平台,对本文提出的控制策略进行实验验证。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年10期)2022-06-17
西部交通科技(2022年2期)2022-04-27
机械科学与技术(2022年2期)2022-03-30
内燃机与配件(2022年2期)2022-01-17
科技风(2021年10期)2021-04-18
电机与控制学报(2019年10期)2019-12-03
速读·上旬(2019年2期)2019-10-21
科学导报·科学工程与电力(2019年44期)2019-09-10
