
电动自行车骑行人交通违法行为演化博弈分析
2022-03-16 08:34汤天培
计算机仿真 2022年2期
汤天培,王 华,陈 丰,曹 阳
(1.南通大学交通与土木工程学院,江苏 南通 226019;2.新加坡国立大学工程学院,新加坡 117576;3.同济大学交通运输工程学院,上海 200092)
1 引言
电动自行车已经成为我国居民日常出行的主要交通方式之一,但由电动自行车骑行人引发的交通事故在不断增加。相关研究表明[1-4],电动自行车骑行人的交通违法行为(包括闯红灯、超速骑行、占用机动车道骑行、逆向骑行等)是导致电动自行车相关交通事故的主要原因之一。现有研究主要从个体特征(性别、年龄等)[5,6]、认知心理(态度、主观规范、知觉行为控制、道德规范、从众倾向等)[6]、交通运行条件(机动车交通量、违法骑行人数量)[5]、交通设施条件(交叉口类型、交叉口大小、遮雨棚等)[7,8]等方面研究其对骑行人交通违法行为的影响,而忽略了交通执法者执法策略对交通违法行为的影响。目前仅有交通执法策略对机动车驾驶人交通违法行为影响的相关研究。比如,刘翰宁等[9]建立了阶位罚款额度优化模型,提出了递增式阶梯罚款机制。Wong等[10]基于多项Logit模型,采用震慑效果指标量化处罚水平产生的影响,研究发现提高处罚额度和违法扣分能有效降低驾驶人违法行为。Sze等[11]评估了处罚和违法监控综合策略的效果,研究表明该综合策略能有效降低驾驶人的违法比例。由此可见,鲜有文献深入探究交通执法策略对电动自行车骑行人交通违法行为的影响机理。
对电动自行车骑行人而言,会根据感知收益差、处罚额度、社会负面影响,以及自身对于交通执法者以往的执法概率的认知,进行交通违法行为的决策。对交通执法者而言,受限于警力限制,警力无法覆盖区域内每个路段,交通执法者会根据处罚额度、执法成本、社会负面影响,以及骑行人群体以往的违法概率,综合决策在区域路网内警力或交通监控摄像头对路段和交叉口的覆盖密度,即执法概率。因此,两者之间存在博弈关系,即骑行人“违法”或“不违法”的策略选择与交通执法者“执法”或“不执法”的策略选择是一个互动的动态演化过程。而演化博弈论就是将博弈分析与动态演化相结合的分析方法[12-14],可应用于探究电动自行车骑行人与交通执法者策略选择的演化博弈过程与规律,并通过仿真分析处罚额度、感知收益差、执法成本和社会负面影响,对博弈双方策略选择概率的影响,揭示不同交通执法策略对电动自行车骑行人交通违法行为的影响机理。
2 电动自行车骑行人与交通执法者的演化博弈模型分析
2.1 博弈模型假设
基于对电动自行车骑行人与交通执法者策略选择的合理考虑,提出以下假设。
假设1:骑行人的策略集为{违法、不违法},交通执法者的策略集为{执法、不执法}。其中,“不执法”是指在区域路网内没有警力巡逻或交通监控摄像头。
假设2:骑行人和交通执法者都是在不确定情况下选择策略,博弈双方均为有限理性的,无法通过一次博弈而获取自身的最大收益策略,必须通过不断的重复博弈才能获取最大收益策略。
假设3:研究主要考虑骑行人群体违法行为决策,不考虑骑行人个体特征的差异影响,仿真参数采用群体平均值,因此对群体的行为决策而言,分析结果仍然是合理的。
假设4:骑行人在选择违法策略时,认为违法后发生交通事故的概率为零,即在决策是否违法时未考虑可能发生交通事故后的成本。相关研究表明,虽然大部分的驾驶人能意识到交通违法行为会产生事故风险,但是他们仍然乐观的相信这些交通事故不会发生[15]。
2.2 博弈矩阵构建
当骑行人选择“违法”,交通执法者选择“执法”,即“违法-执法”策略时,骑行人的收益为V1-Cp,其中V1为骑行人认为单次违法行为后产生的平均感知收益(单位:元),Cp为交通执法者对单次违法行为的平均处罚额度(单位:元);交通执法者的收益为Cp-Ce,其中Ce为交通执法者单次执法的平均执法成本(单位:元)。当骑行人选择“违法”,交通执法者选择“不执法”,即“违法-不执法”策略时,骑行人的收益为V1,交通执法者的收益为-I,其中I为单次违法行为未被处罚产生的平均社会负面影响,用经济成本反应该影响(单位:元)。骑行人选择“不违法”,交通执法者选择“执法”,即“不违法-执法”策略时,骑行人的收益为V2,交通执法者的收益为-Ce,其中V2为骑行人认为单次不违法产生的平均感知收益(单位:元)。骑行人选择“不违法”,交通执法者选择“不执法”,即“不违法-不执法”策略时,骑行人的收益为V2,交通执法者的收益为0。由此可得,电动自行车骑行人与交通执法者的博弈矩阵,见表1。
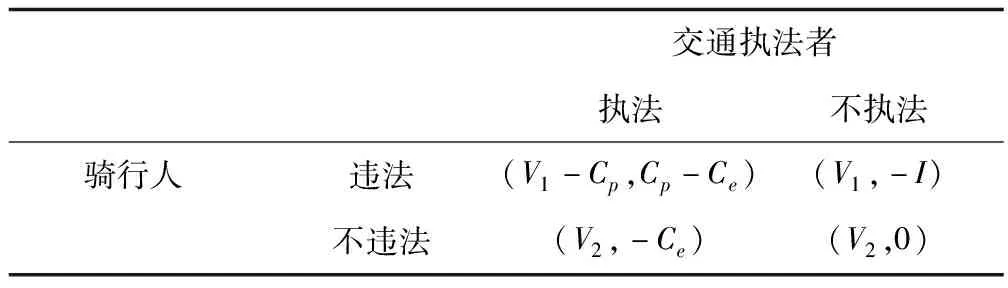
表1 博弈矩阵
2.3 演化博弈模型构建
假设电动自行车骑行人选择“违法”策略的概率为p,则选择“不违法”策略的概率为1-p;假设交通执法者选择“执法”策略的概率为q,则选择“不执法”策略的概率为1-q。其中,交通执法者选择“执法”策略的概率q,即为在某区域路网内警力或交通监控摄像头对路段和交叉口的覆盖密度。骑行人与交通执法者可根据历史信息判断对方的策略选择行为,表现为策略选择概率p和q的动态变化与调整,即博弈双方的策略选择概率在动态复制中演化。由此,基于演化博弈理论中的复制动态分析法[16],进行演化博弈模型的构建。
(1)
(2)
(3)
(4)
(5)
(6)
将电动自行车骑行人策略选择概率的复制动态方程记为dp/dt,交通执法者策略选择概率的复制动态方程记为dq/dt,计算表达式如下
(7)
(8)
2.4 静态处罚策略模型的求解及稳定性分析
采用Jacobian矩阵的局部稳定分析法进行检验[16],即根据Jacobian矩阵对应行列式及迹满足的条件“Det(J)>0且Tr(J)<0”筛选出演化稳定策略(ESS)。根据式(7)和(8)可得Jacobian矩阵(9),以及该矩阵的Det(J)和Tr(J),分别为式(10)和(11)
(9)
Det(J)=(1-2p)(V1-V2-qCp)(1-2q)
(pCp+pI-Ce)-(q-q2)(Cp+I)(p2-p)Cp
(10)
Tr(J)=(1-2p)(V1-V2-qCp)+(1-2q)
(pCp+pI-Ce)
(11)
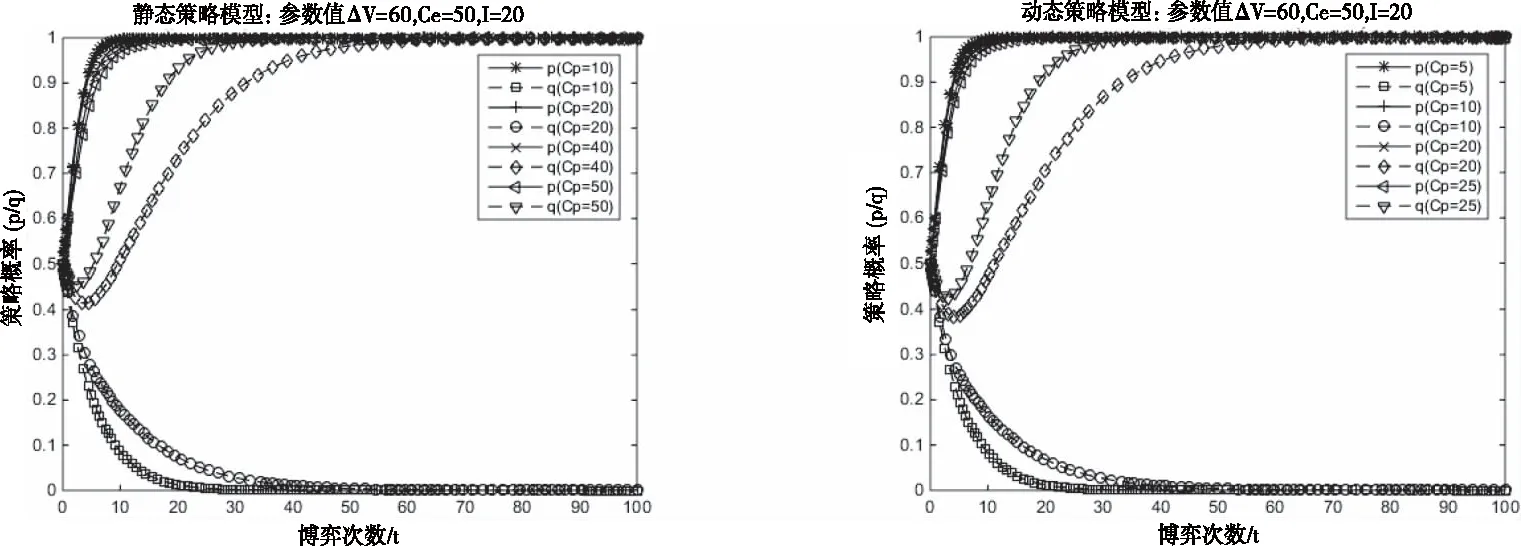
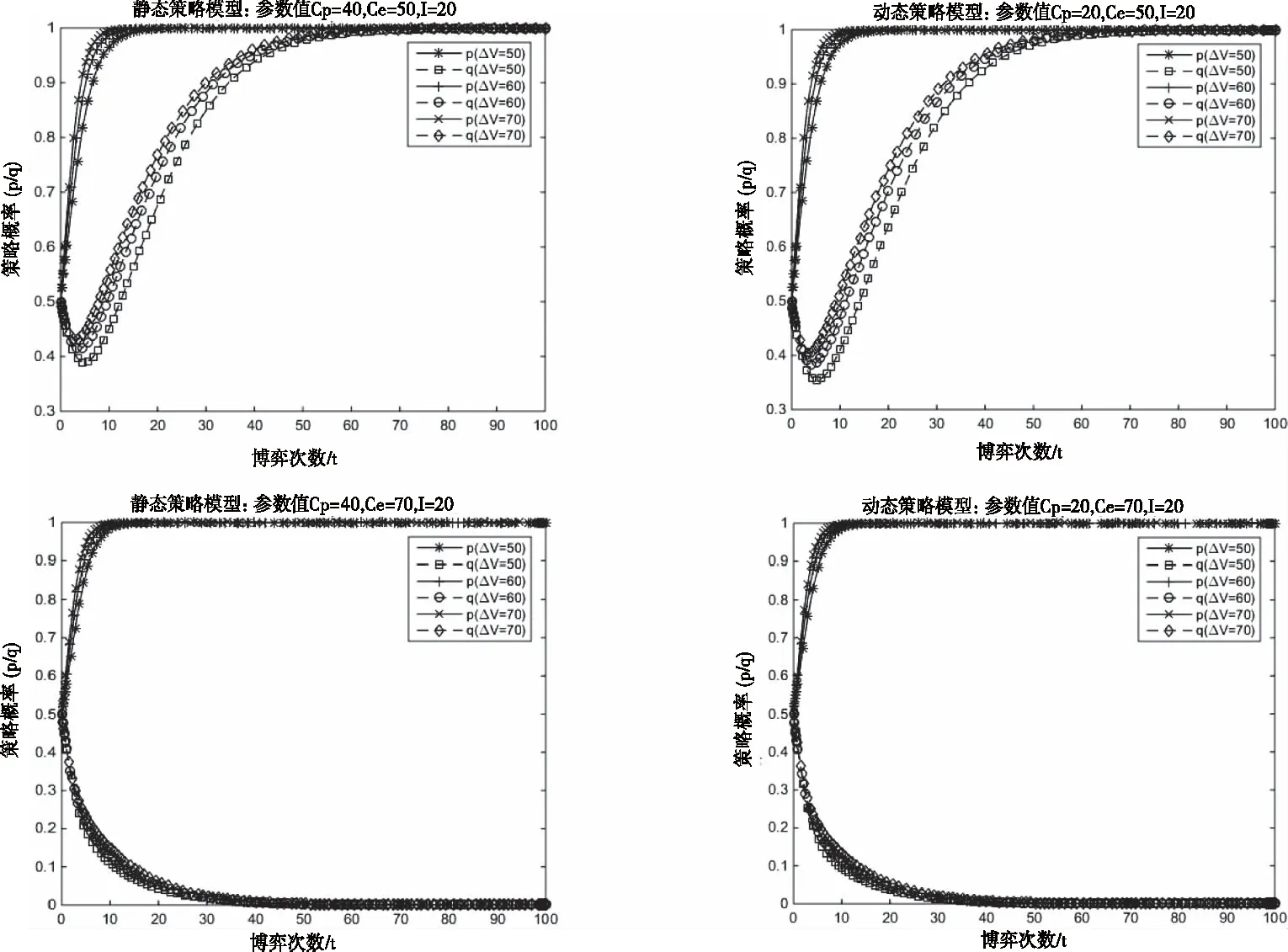
由式(10)和(11)可知,骑行人对交通违法与不违法的感知收益差是研究的重点,因此令V1-V2=ΔV,ΔV即为感知收益差。根据演化稳定策略的条件,分别对演化博弈系统的稳定性进行分析①条件一:当ΔV>Cp,且Cp+I>Ce时,E4=(1,1)为均衡点;②条件二:当ΔV>0,且Cp+I 静态处罚策略模型的稳定性条件三中,即当0<ΔV (12) (13) (14) 根据式(13)和(14)可得Jacobian矩阵(15),以及该矩阵的Det(J)和Tr(J),分别为式(16)和(17) (15) Det(J)=(qCp(3p2-1)+(V1-V2)(1-2p))(1-2q)(p2Cp+p(Cp+I)-Ce)-(2pqCp(1-q) -(q2-q)(Cp+I))(p3-p)Cp (16) Tr(J)=qCp(3p2-1)+(V1-V2)(1-2p)+(1-2q)(p2Cp+p(Cp+I)-Ce) (17) 根据演化稳定策略的条件,分别对演化博弈系统的稳定性进行分析:①条件一:当ΔV>2Cp,且2Cp+I>Ce时,E4=(1,1)为均衡点;②条件二:当ΔV>0,且2Cp+I 采用MATLAB进行仿真分析,通过输入参数的调整,观察静态处罚策略模型和动态处罚策略模型演化博弈规律的变化。探究处罚额度、感知收益差、执法成本和社会负面影响,对电动自行车骑行人和对交通执法者策略选择演化规律的影响。由于博弈双方的策略选择初始概率对均衡解没有影响,本次仿真设定概率初始值为(p0,q0)=(0.5,0.5)。 在纯策略条件下,即条件一和条件二情况下,仿真结果如图1至图4。在静态或动态策略模型中,博弈双方的策略选择概率均收敛于均衡解(1,1)或(1,0)。随着处罚额度的增加/感知收益差的减小/执法成本的减小/社会负面影响的增加,电动自行车骑行人选择违法的概率收敛于1的速度会变慢;随着处罚额度的增加/感知收益差的增加/执法成本的减小/社会负面影响的增加,交通执法者选择执法的概率收敛于1的速度会变快(条件一),收敛于0的速度会变慢(条件二)。由此可见,当最大处罚额度小于感知收益差,且执法成本较小(小于最大处罚额度和社会负面影响成本之和)时,电动自行车骑行人倾向于选择违法行为,交通执法者倾向于选择执法。当执法成本较高(大于最大处罚额度和社会负面影响成本之和)时,电动自行车骑行人始终倾向于选择违法行为,而交通执法者倾向于选择不执法。因此,在上述情况下无论如何调整处罚额度、感知收益差、执法成本和社会负面影响,均无法有效减少电动自行车骑行人的交通违法行为。 图1 处罚额度对博弈双方策略选择概率的影响(条件一、二) 图2 感知收益差对博弈双方策略选择概率的影响(条件一、二) 图3 执法成本对博弈双方策略选择概率的影响(条件一、二) 图4 社会负面影响对博弈双方策略选择概率的影响(条件一、二) 在混合策略条件下,即条件三情况下,仿真结果如图5至图8,采用动态处罚策略可有效抑制博弈双方的策略选择波动,并达到均衡解。 4.2.1 处罚额度影响 如图5,静态策略模型中,博弈双方的策略选择概率围绕(0.38,0.83)、(0.30,0.63)、(0.25,0.50)进行周期性波动,即随着处罚额度的增加,骑行人与交通执法者策略选择的波动中心点逐渐下降,但无法达到均衡解。动态策略模型中,博弈双方的策略选择概率经过多次博弈波动后收敛于均衡解(0.67,1)、(0.40,0.90)、(0.34,0.74),即随着处罚额度的增加,骑行人选择违法的概率显著降低,交通执法者选择执法的概率也显著降低。 图5 处罚额度对博弈双方策略选择概率的影响(条件三) 由此,建议交通执法者通过调研,充分了解骑行人对违法和不违法的感知收益,基于感知收益差合理制定处罚额度。采用动态处罚策略,制定的最大处罚额度大于感知收益差,在此基础上提高处罚额度,可保证交通执法者采取较低的执法概率,也能有效约束骑行人的交通违法行为。 4.2.2 感知收益差影响 如图6,静态策略模型中,博弈双方的策略选择概率围绕(0.43,0.20)、(0.43,0.40)、(0.43,0.60)进行周期性波动,即随着感知收益差的减小,骑行人选择违法的概率波动中心点保持不变,交通执法者选择执法的概率波动中心点显著降低,但均无法达到均衡解。动态策略模型中,博弈双方的策略选择概率经过多次博弈波动后收敛于均衡解(0.52,0.27)、(0.52,0.53)、(0.52,0.79),即随着感知收益差的减小,骑行人选择违法的概率保持不变,交通执法者选择执法的概率显著减小。 图6 感知收益差对博弈双方策略选择概率的影响(条件三) 由此,建议交通执法者采用动态处罚策略,通过交通安全基础教育、宣传与培训等,将感知收益差控制为小于最大处罚额度。在此基础上减少感知收益差,以较低的警力或交通监控摄像头覆盖密度,也能将骑行人交通违法概率控制在同一水平。 由此,建议交通执法者采用动态处罚策略,通过交通安全基础教育、宣传与培训等,将感知收益差控制为小于最大处罚额度。在此基础上减少感知收益差,以较低的警力或交通监控摄像头覆盖密度,也能将骑行人交通违法概率控制在同一水平。 4.2.3 执法成本影响 如图7,静态策略模型中,博弈双方的策略选择概率围绕(0.43,0.60)、(0.71,0.60)、(0.86,0.60)进行周期性波动,即随着执法成本的减小,骑行人选择违法的概率波动中心点显著降低,交通执法者选择执法的概率波动中心点保持不变。动态策略模型中,博弈双方的策略选择概率经过多次博弈波动后收敛于均衡解(0.52,0.79)、(0.78,0.67)、(0.89,0.62),即随着执法成本的减小,骑行人选择违法的概率会显著降低,交通执法者选择执法的概率会逐渐提高。 图7 执法成本对博弈双方策略选择概率的影响(条件三) 由此,建议采取动态处罚策略,随着执法成本的减小,交通执法者适当提高执法概率,可将骑行人违法概率控制在更低的水平。比如,采用基于RFID技术的闯红灯自动识别系统,对电动自行车骑行人闯红灯行为进行自动抓拍。虽然前期硬件投入会导致执法成本的增加,但是硬件成本会随着技术发展而降低,同时也能减少人力成本,从而有效控制电动自行车骑行人的交通违法行为。 4.2.4 社会负面影响 如图8,静态策略模型中,博弈双方的策略选择概率围绕(0.43,0.60)、(0.38,0.60)、(0.30,0.60)进行周期性波动,即随着社会负面影响的增加,骑行人选择违法的概率波动中心点逐渐降低,交通执法者选择执法的概率波动中心点保持不变,但均无法达到均衡解。动态策略模型中,博弈双方的策略选择概率经过多次博弈波动后收敛于均衡解(0.52,0.79)、(0.45,0.83)、(0.36,0.88),即随着社会负面影响的增加,骑行人选择违法的概率会逐渐降低,交通执法者选择执法的概率会逐渐增加。 图8 社会负面影响对对博弈双方策略选择概率的影响(条件三) 由此,建议采用动态处罚策略,当社会负面影响成本不断提高时,将促使交通执法者维持在较高的执法概率,从而有效降低电动自行车骑行人的违法概率。具体而言,可通过社会舆论手段提高交通违法行为的社会负面影响,有助于显著降低骑行人的交通违法行为。 1)基于演化博弈论,构建了电动自行车骑行人与交通执法者策略选择的演化博弈模型,分析了交通执法策略对骑行人交通违法行为的影响,提出了交通执法策略建议,可有效减少电动自行车骑行人的交通违法行为。 2)当交通执法者制定的最大处罚额度小于感知收益差时,采用静态处罚策略或动态处罚策略,均无法有效减少电动自行车骑行人的交通违法行为。 3)当交通执法者制定的最大处罚额度大于感知收益差,执法成本较小(小于最大处罚额度和社会负面影响成本之和)时,采用静态处罚策略,骑行人与交通执法者策略选择的博弈过程没有均衡解,这个不利于双方的策略选择。采用动态处罚策略,可有效抑制博弈双方的策略选择波动,达到均衡解。现阶段,全国各地都存在交通警力不足的情况,可通过合理制定或优化处罚额度、感知收益差、执法成本、社会负面影响等因素,以较低的区域路网警力覆盖密度,也能有效降低电动自行车骑行人的交通违法行为。 4)本次构建的演化博弈模型中仍存在一些不足。比如,未考虑骑行人可能发生交通事故而产生的成本,以及未考虑交通执法者的执法有效性等。以上不足将是后续研究工作的重点3 电动自行车骑行人与交通执法者的动态处罚演化博弈模型分析
3.1 动态处罚演化博弈模型构建

3.2 动态处罚策略模型的求解及稳定性分析
4 演化博弈仿真分析
4.1 纯策略条件

4.2 混合策略条件


5 结论
猜你喜欢
意林(2021年5期)2021-04-18投资与理财(2019年8期)2019-12-01扬子江(2019年1期)2019-03-08中华魂(2018年2期)2018-05-14小天使·一年级语数英综合(2017年6期)2017-06-07中国市场(2016年40期)2016-11-28股市动态分析(2015年19期)2015-09-10经济研究导刊(2009年32期)2009-03-05
