基于多传感器融合的新型智能导盲杖设计
2022-03-29 05:54钱鹏飞
科技创新与应用 2022年7期
钱鹏飞
(西北民族大学 电气工程学院,甘肃 兰州 730030)
目前,中国盲人数量已突破两千万大关,而城市盲道设计不合理、盲道被非法侵占等危害盲人出行安全的问题屡禁不止[1-3]。随着科技发展,智能盲杖不断涌现,但这些智能盲杖并不智能[4-5]。针对市售智能盲杖无法探测上方障碍物、地面路况(如凹坑、楼梯高度)等缺点,本系统基于89C52单片机,采取多传感器融合的技术实现对上方障碍物、前方障碍物、路面情况的检测,并且辅以优化算法增加检测频率,使盲杖反应更快速、检测更灵敏。另外,盲杖还具有智能语音播报、夜晚LED安全灯、倾倒检测等辅助功能,方便盲人的出行。
1 系统总体设计方案
本系统由89C52作为控制核心,由超声波测距传感器、加速度传感器、光敏传感器、语音播报模块和电池模块组成。实物图如图1所示,超声波探测角度及范围如图2所示,总体设计框图如图3所示,系统所有硬件初始化后,光敏传感器首先开启,检测光线强度,光线弱则打开LED灯,确保盲人夜晚出行安全。此后超声波测距循环开启,若前方传感器检测到1.5 m内有障碍物,或上方传感器检测到小于1.5 m的障碍物,抑或下方传感器在0.2 m内检测不到地面,则控制语音模块播报障碍情况。同时,进行检测加速度,判断是否摔倒,摔倒则立刻报警。
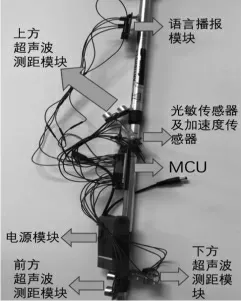
图1 实物示意图

图2 三组超声波工作示意图
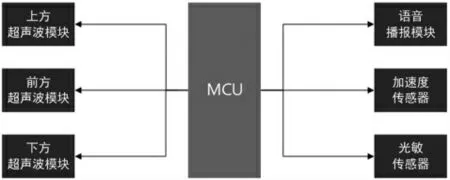
图3 总体结构框图
2 系统主要硬件设计
2.1 微处理器
89C52价格低廉,处理器RAM内有双重功能的地址区间,既可作字节处理,也可作位处理,使用方便。其I/O口的设置也很简单,且经过几十年发展,各类传感器及传感器源码很完备,可以大大简化设计难度。
2.2 超声波测距模块
本系统采用HC-SR04超声波测距模块,其通过IO触发测距功能,电路原理图如图4所示。使用时,首先向trig端口输入一个大于10 us的高电平,触发测距功能。此时,超声波发送口发出8个40 Hz的方波。若在指定时间内接收口收到回波,则echo端输出高电平且启动定时器,以计算高电平输出持续时间。当echo端停止输出高电平时,定时器也停止计时。此时定时器所计时间,即为发出超声波遇障碍物往返一程所用时间。最后可以通过公式,算出距离前方障碍物的距离。其计算公式为:
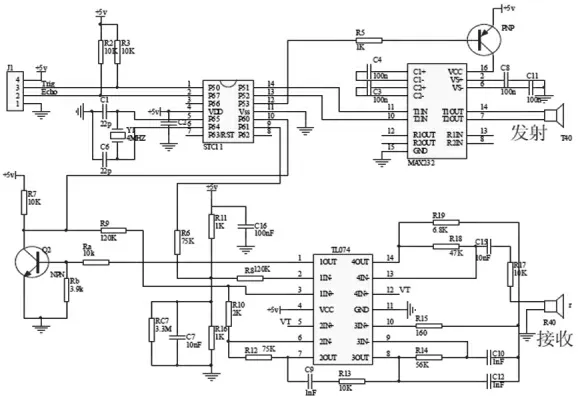
图4 HC-SR04电路原理图
距离=(高电平持续时间*340 m/s)/2。
2.3 倾角检测模块
倾角加速度检测采用GY521模块,其集成MPU-6050传感器。因为STC89C52芯片没有集成I2C控制器,故使用软件模拟的方法来实现GY521的I2C功能。
使用时,首先通过I2C读写寄存器,进行初始化。传感器原始数据的AD值是16位数字量,一个数据需要两个字节,来分别储存轴向加速度的高八位及低八位,共同组成16位数据。最后把16位数据除以16 384,即可得到单位为g的轴向加速度。
2.4 语音播报模块
语音播报模块采用XY-V17B,集成IO分段触发,UART串口控制,ONE_line单总线串口控制,标准MP3等功能;支持MP3,WAV解码格式,最大支持32 G TF卡存储,可通过USB数据线连接电脑更新TF卡存储音频文件,语音播报模块电路原理图如图5所示。
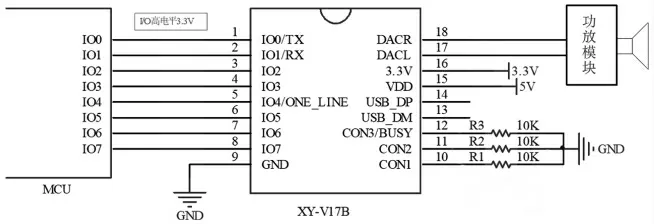
图5 XY-V17B语音播报模块电路原理图
运行时,若检测到障碍物,则根据障碍物情况不同,通过3个IO口高低电平的不同的组合,来播报不同的提示语。
2.5 光敏传感器
光敏传感器是一种将光信号转换为电信号的传感器,光敏二极管管芯是PN结,具有光敏特性,有单向导电性。本文的传感器采用telesky的光敏传感器,电路原理图如图6所示。其优点为使用简单,调节方便(可直接通过内嵌的滑动变阻器调节阈值),若外部光线强度小于所定阈值,则DO口输出高电平,若大于所定阈值,则DO口输出低电平。
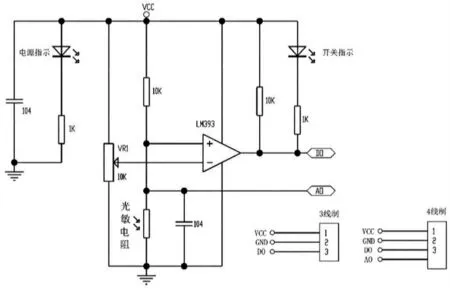
图6 telesky光敏传感器电路原理图
3 软件设计
多传感器融合是本导盲杖的主要特点。硬件初始化后,首先光敏传感器会检测当前场景光线情况,若光线不强,则传感器DO口输出高电平,使LED灯亮起,确保盲人夜晚出行安全。此后上中下三组超声波传感器依次启动检测,当上方障碍物低于1.5 m时,语音播报“上方障碍物过低”;当前方障碍物小于1.5 m时,语音播报“前方有障碍物”;当检测到下方地面距离大于0.2 m时,语音播报“下方凹坑,请注意”。因为上中两组传感器只检测小于1.5 m范围内的障碍物,故计算后可得,当上中两组超声波回传时间大于9 ms,可直接结束检测,进入下方传感器的检测,优化响应速度,提高导盲杖灵敏度。
每轮距离检测结束后,再进行三轴加速度检测并计算合加速度[6]。若合加速度过大,1 s后再进行1次检测,若合加速度为0,则判断为使用者摔倒并语音报警。
4 实验结果分析
为验证导盲杖报警灵敏度与其他功能的可靠性,于不同时间、不同地点进行了多组实验。取其中的两例:一为西北民族大学榆中校区图书馆正门的连续台阶处至升旗台的70 m区域,二为校门出口前50 m至出口处车辆升降杆的区域,实验数据见表1、表2。
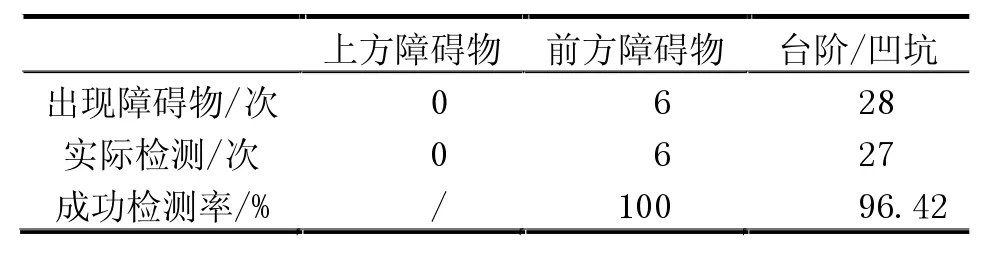
表1 图书馆区域检测结果
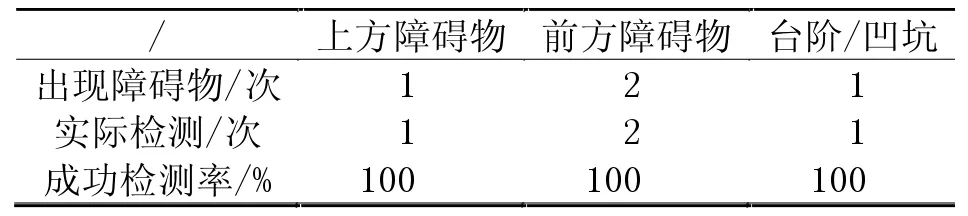
表2 升降杆区域检测结果
经试验,该盲杖在路况结构简单的区域内,均反应灵敏,可及时提醒使用者路面情况,夜晚LED灯也能根据光线情况自动开关,倾倒报警功能正常。但在路况复杂,人流量大的地段,会出现报警频繁的现象。另外,若障碍物体积过小,会有一定概率检测不到。
5 结束语
基于多传感融合的智能盲杖采用多组传感器结合,不仅能探测前方障碍物,还能检测上方障碍物,还可对地面路况进行检测,是其他同类盲杖所没有的功能。经测试,本盲杖能可靠检测楼梯的阶梯高度及凹坑深度,对盲人来说,不仅减少了盲杖下探这类繁琐动作,还避免了下探过程中出现摔倒或意外踩空的危险。另外,倾倒检测及夜晚LED等辅助功能为使用者的出行提供了方便与保障。随着5G时代的到来,在万物互联及智慧城市的建设中,盲道智能化的建设也会迎来大的发展,而作为配套终端的智能盲杖,会拥有更广阔的发展天地。
猜你喜欢
山西电子技术(2022年1期)2022-02-28
山东陶瓷(2021年5期)2022-01-17
炎黄地理(2021年12期)2021-01-04
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
科技传播(2019年15期)2019-08-22
电子技术与软件工程(2017年2期)2017-03-15
西部广播电视(2016年16期)2016-11-09
科学家(2015年12期)2016-01-20