励磁系统动态增益对凸极发电机动态阻尼的影响
2022-04-11 06:18霍承祥于大海马晓光李志强
电力系统自动化 2022年7期
霍承祥,于大海,马晓光,夏 潮,李志强,高 磊
(中国电力科学研究院有限公司,北京市 100192)
0 引言
随着高比例新能源电力系统的快速发展,电力系统安全稳定问题日益突出。由于风电、光伏等新能源机组出力波动性大、电压支撑及频率支撑能力较弱等特点,要在提高新能源消纳能力的同时保持系统安全稳定运行,必然要对同步发电机控制调节能力提出更高的要求。发电机励磁系统模型参数对机组性能具有显著影响,其中,励磁系统动态增益对发电机动态稳定性的影响明显。电力系统动态稳定与发电机阻尼转矩直接相关,工程中一般用阻尼比来衡量动态稳定性能。另外,凸极发电机一般为水轮发电机,且绝大多数采用自并励励磁系统。
由于励磁系统动态增益直接影响发电机电压动态响应速度,所以当前实际工程中往往通过修改动态增益,使机组空载时相关的动态性能满足要求[1-2]。但是动态增益设置时还应兼顾发电机负载状态下的动态稳定性能和阻尼效果,这一工作仍未广泛开展。而且在励磁系统动态增益影响电力系统动态稳定方面,仍存在一些认识误区。比如,认为较大的励磁动态增益再配置电力系统稳定器(PSS)更有利于系统动态稳定,或持相反的观点。但两种观点均缺乏具体的深入研究,并且不一定与实际相符。
文献[3]分析了阻尼绕组和阻尼槽楔对同步发电机励磁绕组电磁转矩的影响;文献[4]分析了励磁辅环控制参数对系统阻尼的影响;文献[5]分析了励磁机时间常数对系统动态稳定的影响;文献[6]分析了一种基于电力电子全控器件的柔性励磁系统利用无功阻尼器提升低频段阻尼的方法;文献[7]提出了一种在振荡过程中励磁系统整体阻尼特性的计算方法;文献[8-10]重点分析了调差系数对系统动态阻尼的影响;文献[11]分析了同步调相机励磁绕组电阻和阻尼绕组电阻对调相机无功响应速度的影响;文献[12]分析了励磁动态增益对发电机暂态稳定的影响。以上文献均未对励磁动态增益影响系统阻尼方面进行具体研究,并且凸极机和隐极机的变化规律并非完全相同[13-14]。所以,需要对这个问题进行探讨,从而为工程技术人员在现场优化配置励磁参数时提供参考。
1 励磁系统动态增益影响发电机动态阻尼的原理
根据文献[15-16],含附加调差的菲利普-海佛隆模型[17]如图1 所示。图中:ΔTM为机械转矩变化量;ΔTe1和ΔTe2分别为电磁转矩分量1 和2 的变化量;Δω 为发电机转速的变化量;Δδ 为发电机功角的变化量;ΔV't为考虑附加调差的机端电压实测值的变化量;ΔVref为机端电压参考值的变化量;ΔEfd为发电机励磁电势的变化量;ΔE'q为发电机q 轴暂态电势的变化量。模型系数K1至K4、K'5、K'6的表达式见附录A 式(A1)至式(A5)[15,17]。

图1 含附加调差的菲利普-海佛隆模型Fig.1 Phillips-Haffron model with reactive current compensation
根据工程实际情况,设自并励机组励磁系统传递函数为KS(1+T1s)/[(1+T2s)(1+TAs)],其中KS为励磁系统静态增益,T1和T2分别为传递函数的超前时间常数、滞后时间常数,TA为励磁调节器电压反馈时间常数,一般取0.01~0.02 s。设KA为励磁系统动态增益,则KA=KST1/T2。因本文只研究动态稳定问题,对于给定的励磁传递函数,扰动过程中其动态增益是确定的,所以后文为方便起见,将励磁系统传递函数简写为KA/(1+TAs)。考虑附加调差(调差系数XC≠0)时的励磁系统阻尼转矩系数KD和同步转矩系数Ks见附录A 式(A6)和式(A7)。电网基频f0=50 Hz,对应的角频率ω0=2πf0。
发电机总体同步转矩系数Ks,total为:

由式(1)、式(3)、式(4)、式(A1)至式(A7)可见,在系统电压Vs恒定的情况下,发电机总体阻尼转矩KD,total和阻尼比ζ 与发电机及励磁系统参数均相关。可以在确定其他参数后,研究动态增益KA对发电机总体阻尼转矩KD,total和阻尼比ζ 的影响。
2 励磁系统动态增益对凸极发电机阻尼转矩及阻尼比的影响
由于难以直接得出励磁系统动态增益KA对总体阻尼转矩KD,total和阻尼比ζ 影响的规律,因此以典型凸极发电机进行计算,研究发电机运行于不同负荷工况时励磁系统附加阻尼转矩系数KD和发电机阻尼比ζ 与动态增益KA的关系,得出KA对发电机动态稳定的影响。由于采用典型参数,所以计算结果具备较为普遍的参考价值。
2.1 大有功负荷
单机无穷大系统如附录B 图B1 所示。发电机及励磁参数数值如下:有功功率P=0.89 p.u.;无功功率Q=0.37 p.u.;系统电压V̇s=0.98∠0°;TA=0.02 s;发电机d 轴稳态电抗Xd=1.0 p.u.;发电机q轴稳态电抗Xq=0.72 p.u.;发电机d 轴暂态电抗X'd=0.33 p.u.;发电机d 轴暂态时间常数T'd0=14 s;H=4.4 s;主变压器损耗电抗XT=0.15 p.u.;线路电抗XL=0.119 p.u.;调差系数XC=-0.07 p.u.。
励磁系统附加阻尼转矩系数KD和阻尼比ζ 随KA的变化如图2 和图3 所示。发电机总体同步转矩系数Ks,total变化曲线见文献[12]。

图2 附加阻尼转矩系数KD变化曲线Fig.2 Changing curve of additional damping torque coefficient KD

图3 阻尼比ζ 变化曲线Fig.3 Changing curve of damping ratio ζ
由图2 和图3 可见,大负荷工况下,当KA增大时,阻尼转矩系数KD和阻尼比ζ 均为负且单调减小,曲线的斜率有所变化。其中,KD由-0.328 2 p.u.减小到-6.502 1 p.u.,ζ由-0.002 7减小到-0.041 9。故此凸极发电机组在大负荷工况下,励磁系统提供负阻尼,且阻尼随着动态增益的增大而变弱。
2.2 小有功负荷
发电机P=0.29 p.u.,Q=0.13 p.u.,阻尼转矩系数KD和阻尼比ζ 随KA的变化曲线分别如附录B 图B2、图B3 所示。
由附录B 图B2、图B3 可见,小有功负荷工况下,当KA增大时,阻尼转矩系数KD和阻尼比ζ 均呈抛物线变化规律,其中,KA由20 增加至300 时KD和ζ 呈减小趋势,KA由300 增加至360 时KD和ζ 微小增加。KD由0.002 3 p.u.减小到-0.495 8 p.u.后微幅增加到-0.487 5 p.u.,ζ 由0.000 018 减小到-0.003 9后微幅增加到-0.003 8,基本在0 附近。故此凸极发电机组在小负荷工况下,励磁系统提供负阻尼,且阻尼随着动态增益变大而有所变化,但整体影响很小。
综合上述计算结果可见,随着凸极发电机负荷减小,动态增益KA对发电机阻尼转矩系数KD和阻尼比ζ 的影响相应减小。本算例KA增大时,励磁系统在机组大负荷工况下提供负阻尼,且阻尼随着动态增益变大而明显变弱。小负荷工况下,随着动态增益变大,ζ 的变化幅度微小。所以在实际生产中,为改善该凸极发电机组动态阻尼,应在励磁动态增益满足相关标准要求的前提下取较小值,且通过配置PSS 可以进一步提高系统阻尼。
3 动态增益对励磁系统无补偿频率响应特性的影响
根据图1,当以ΔVref为输入、以机端电压实际值的变化量ΔVt为输出时,可推导出其传递函数,见附录A 式(A8)。以s=jω 代入式(A8)可得到不同频率下菲利普-海佛隆模型的频率响应特性。从式(A8)可知,励磁系统动态增益KA变化必然导致该模型频率响应特性的改变。
下面以实际算例来验证单机无穷大系统在不同KA下频率响应特性的差异。系统参数同2.1 节。KA分别设为50、100、150 时,系统的相频特性和幅频特性见附录B 图B4。由图B4 可见,在给定工况下,随着KA增大,相频特性和幅频特性向上移动,且KA越大,励磁系统在[0.1,3.0]Hz 频段的相位滞后越小,且幅值越大。KA由50 增加到150 时,在0.3 Hz 时滞后相位减少约35°,幅值移动幅度约为0.35 p.u.;在0.5 Hz 时滞后相位减少约25°,幅值移动幅度约为0.4 p.u.。随着频率升高,相位和幅值移动幅度逐渐减小。所以动态增益KA对系统频率响应特性的影响是很显著的。根据文献[18],励磁系统在低频段[0.1,2.0]Hz 的相位滞后越接近-90°,其动态阻尼越好。而一般主力发电机组参与的低频振荡频率范围在0.1~1.5 Hz,由附录B 图B4 可见,在0.1~1.5 Hz 范围内,KA=50 比KA=150 时相位滞后更接近-90°,因此其阻尼更好,这与第2 章计算结论一致。
4 动态稳定时域仿真
本章以单机系统、两机系统和实际电力系统为例,计算研究励磁动态增益KA对发电机动态阻尼的影响。
4.1 单机无穷大系统
附录B 图B1 所示单机无穷大系统,在KA=50、100、150 时进行动态稳定仿真。发电机初始功角为40°,初始有功功率为550 MW(满发),初始无功功率为114 Mvar,机端电压为1.0 p.u.。故障形式为机端电压2%阶跃扰动,观察发电机有功变化动态阻尼,仿真结果如附录B 图B5 所示,计算分析如表1所示。

表1 不同动态增益下的动态阻尼Table 1 Dynamic damping with different dynamic gains
由表1 可见,KA增大时发电机有功振荡阻尼降低,振荡频率升高,KA的影响明显。仿真结果与第2章计算结论一致。
4.2 两机系统
两机系统如图4 所示。图中:VT为发电机G1端电压;VS为发电机GS端电压;VH为发电机G1主变压器高压侧电压;L1为发电机G1的本地负荷;L2为发电机GS的本地负荷。受端发电机GS与送端发电机G1容量相等。G1的初始有功功率为550 MW,无功功率为165 Mvar,机端电压为1.0 p.u.。在励磁动态增益KA为50、100、150 时,进行G1机端电压2%阶跃扰动,观察G1有功变化的动态阻尼。计算结果见附录B 图B6,计算分析如表2 所示。

表2 发电机G1不同动态增益下的动态阻尼Table 2 Dynamic damping with different dynamic gains of generator G1

图4 两机两负荷系统Fig.4 Two-generator two-load system
由表2 可见,KA增大时发电机有功振荡阻尼降低,振荡频率升高,KA的影响明显。仿真结果与第2节计算结论一致。
4.3 实际系统
下面以某实际电厂为例,计算仿真励磁动态增益对凸极发电机动态稳定的影响。该厂6 台凸极发电机组满出力运行,PSS 退出。同时修改6 台机组励磁动态增益KA,在发电机G1机端进行5%电压阶跃扰动,观察发电机G1有功变化的动态阻尼。仿真结果如图5 所示,计算分析如表3 所示。
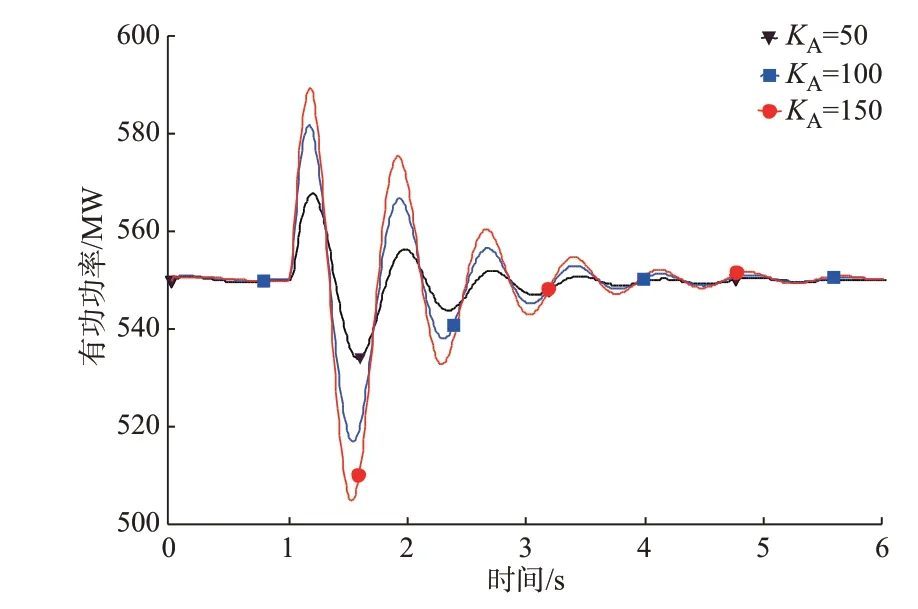
图5 实际系统凸极发电机的有功功率变化曲线Fig.5 Changing curves of active power of salient-pole generator in real system

表3 实际系统中发电机G1不同动态增益下的动态阻尼Table 3 Dynamic damping with different dynamic gains of generator G1 in real system
由表3 可见,KA增大时发电机有功振荡阻尼降低,振荡频率升高,KA对系统阻尼的影响趋势与第2章计算结论一致。
当故障形式为远方电网N-2 故障时,同时修改6 台机组的励磁动态增益KA,观察发电机G1相对于远端参考机组的功角变化。仿真结果见附录B图B7。
由图B7 可见,发电机G1相对于参考机组的振荡频率约0.9 Hz,当KA=50 时仍能保持动态稳定,KA=100、150 时动态失稳,其中KA=150 比KA=100 时更早失去动态稳定。所以随着本电厂6 台机组励磁系统动态增益增大,该电厂机组相对于参考机组的动态稳定性变差,与第2 章计算结论一致。
5 实验室验证
在网源协调实验室全数字电力系统仿真器(advanced digital power system simulator,ADPSS)平台,以励磁调节器物理装置连接电力系统仿真数据中的目标机组,使机组运行于有功大负荷工况。励磁动态增益KA分别设为50、100、150,进行机端电压3%阶跃扰动,记录相关电气量,如附录B 图B8所示,计算分析有功振荡的动态阻尼如表4 所示。

表4 ADPSS 实验平台凸极发电机不同动态增益下的阻尼Table 4 Damping with different dynamic gains of salient-pole generator on ADPSS experimental platform
由表4 可见,KA增大时凸极发电机有功振荡阻尼降低,振荡频率升高,KA对系统动态阻尼的影响变化趋势与第2 章计算结论一致。
6 现场试验
为验证前文的分析计算和仿真结果,在实际电厂机组进行了频率响应特性实测和阻尼效果验证试验。
试验机组为凸极发电机,处于实际电网的功率送端,额定有功功率为550 MW。将励磁动态增益KA分别设为122、81、49,测量励磁系统相频特性,如表5 和附录B 图B9 所示。
由表5 及图B9 可见,在[0.1,2.0]Hz 频段,不同KA下的励磁系统无补偿相频特性差别明显,KA越大,相频特性滞后越少。如当频率为0.5 Hz 时,KA=122 比KA=81 的相频特性向上移动了17°,KA=49 比KA=81 的相频特性向下移动了9°。在低频振荡频段,励磁系统动态增益KA对励磁系统无补偿相频特性的影响明显。

表5 不同动态增益下的励磁系统无补偿相频特性Table 5 Uncompensated phase-frequency characteristic of excitation system with different dynamic gains
在该机组进行阻尼效果验证试验的数据见附录B 图B10。图B10 中有功功率波动的阻尼比和频率测量计算结果见表6。
由表6 可见,随着动态增益KA增大,有功功率波动的动态阻尼降低,振荡频率升高。试验结果与前文计算、仿真及实验结论相符。

表6 凸极发电机不同动态增益下的动态阻尼Table 6 Dynamic damping of salient-pole generator with different dynamic gains
7 结语
1)通过分析菲利普-海佛隆数学模型,可知励磁系统动态增益KA对凸极发电机阻尼转矩、阻尼比均有明显影响。由公式难以直观得出KA对机组阻尼影响的规律,因此以典型凸极发电机进行计算仿真,使研究结果对凸极发电机具有较普遍的参考意义。
2)大、小有功负荷工况下,凸极发电机动态阻尼均随励磁系统动态增益KA增大而减弱。随着发电机有功负荷减小,KA对机组动态阻尼的影响随之减小。实际生产中,为改善凸极发电机(如水电机组)动态阻尼,应使励磁动态增益在满足相关标准要求的前提下取较小数值,且通过配置PSS 可以进一步提高系统阻尼。
3)动态增益KA对低频段励磁系统无补偿频率响应特性影响明显。随着KA增大,相频特性和幅频特性向上偏移,即KA越大,励磁系统在[0.1,3.0]Hz频段的相位滞后越小,幅值越大;随着频率升高,相位和幅值移动幅度逐渐减小。相频特性偏移对阻尼的影响与数值计算结论一致。
4)动态稳定软件仿真、实验室平台实验和现场试验结果与典型参数下的计算结论相符。
5)本文未考虑励磁系统滞后时间常数TA变化的影响,因为凸极发电机主要是水轮发电机,且绝大多数采用自并励快速励磁系统,其TA一般约为0.02 s。但仍然存在极少数采用励磁机励磁方式的凸极发电机,本文研究结论不能直接用于这类励磁系统滞后时间常数TA较大的机组。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
大电机技术(2022年3期)2022-08-06
振动与冲击(2022年1期)2022-01-27
军民两用技术与产品(2021年6期)2021-10-14
河北电力技术(2021年2期)2021-07-29
河北电力技术(2021年2期)2021-07-29
防爆电机(2021年3期)2021-07-21
地震研究(2021年1期)2021-04-13
风能(2020年4期)2020-10-10
南京大学学报(数学半年刊)(2020年1期)2020-03-19
北方工业大学学报(2019年5期)2019-03-30