
A quantitative analysis method for contact force of mechanism with a clearance joint based on entropy weight and its application in a six-bar mechanism
2022-04-12 03:46ZhenNanChen陈镇男MengBoQian钱孟波FuXingSun孙福兴andJiaXuanPan潘佳煊
Chinese Physics B 2022年4期
Zhen-Nan Chen(陈镇男), Meng-Bo Qian(钱孟波), Fu-Xing Sun(孙福兴), and Jia-Xuan Pan(潘佳煊)
Department of Mechanical Engineering,Zhejiang A&F University,Hangzhou 311300,China
Keywords: clearance joint,entropy weight,six-bar mechanism,quantitative analysis
1. Introduction
This paper focuses on the influences of different factors affecting the contact force exerted by an RRR-RRP(five revolute and one prismatic joints) six-bar linkage with a clearance joint. The mechanism is often used in precision computer numerical control (CNC) pressure-mounting pressure machinery and mobile robots. Compared with the crank slider mechanism,the mechanism has good quick-return characteristics,force enhancement characteristics,and low-speed motion characteristics. In other research into six-bar mechanisms, a kinematics model was established,[1,2]and the causes of vibration and noise of RRR-RRP six-bar linkage with a clearance joint in the press were analyzed, but the effect of clearance was not considered. Soh and McCarthy[3]and Balasubramanian and Bagci[4]analyzed the motion characteristics of Watt and Stephenson six-bar chains by combining the research into a six-bar mechanism with robot technology, creating a new idea for the design and optimization. Luoet al.[5]and Xuet al.[6]focused on the characteristics of Watt I and Watt II sixbar mechanisms respectively,and applied them to the walking parts of the robot, realizing the innovative application of the mechanism. In other literature,[7]the motion of a Stephenson I six-bar mechanism was analyzed,and the optimal design of the press based on a Stephenson I six-bar mechanism was completed. Plecnik and Mccarthy[8]have studied the comprehensive equation governing the behaviour of a Stephenson III six-bar mechanism, and then applied it to the analysis of a manipulator. Pennock and Israr[9]used kinematic analysis and kinematic synthesis to verify and analyze the adjustable six-bar mechanism as a variable-speed transmission mechanism.There are some shortcomings in the above researches on six-bar mechanism. One of the shortcomings is that the effect of the clearance on the whole mechanism is not considered,and a method to quantitatively analyze the effect of the clearance is lacking. In order to study the clearance, Johnson[10]conducted a lot of researches of contact mechanics and tribology. The slider with clearances in a four-bar mechanism was studied, and the nonlinear dynamic characteristics were obtained.[11-13]The kinematics analysis and dynamics simulation on the cylinder pair joint with clearance were carried out,and the effects of space clearance,friction coefficient,flexibility of the bar,and other factors in the crank slider mechanism on the dynamic characteristics of the cylinder pair with clearances were investigated.[14-18]Liuet al.[19]and Wanget al.[20]took revolute with clearances as the research object and modified the contact model. Wang[21]and Yan and Guo[22]studied the effects of clearance,friction,lubrication,material inhomogeneity and other factors on the dynamic model and motion accuracy of flexible multi-body system with clearances. Tianet al.[23]made a comprehensive review of multi-body mechanical systems with clearances.
Since the introduction of information entropy, many related methods have been proposed based on information entropy, such as the principle of maximum entropy,[24]the cross entropy,[25]and the Kolmogorov entropy.[26]The entropy weight method is an objective value assignment method based on information entropy theory. As for the research of entropy weight method,in the literature[27]the entropy weight method was used to diagnose the faults of bearings and a better fault identification effect was obtained. The dynamic simulation of the model was conducted and the dynamic characteristics of the model were analyzed. Zhang[28]integrated the entropy weight method into cleanliness,and proposed the concept of “cleanliness entropy”, which is used to diagnose the fault source in such a hydraulic system. Shannon’s entropy weight method was used to optimise the cross entropy, and two models of maximising and minimising the cross efficiency were proposed to improve the accuracy of the analysis.[29]An improved entropy weight method was used to configure the weight system of load pattern recognition method index,which improves the operating efficiency and accuracy of the power load pattern recognition algorithm.[30]A nonlinear case of time series signals based on permutation entropy was analyzed, and concepts of permutation entropy was applied to several cases.[31]A new decision model was established based on the information entropy weight method, which provided a good evaluation index for the research in their respective fields.[32-34]Yanet al.[35]proposed a new method of identifying the centrality of influential nodes in complex networks based on the entropy power method, which improves the accuracy of identifying influential nodes. Although the information entropy and entropy weight methods have been applied to many fields, the relevant research on quantitative analysis of six-bar mechanism with a clearance is still lacking.
In this paper, the concept of “contact force entropy weight”is proposed to analyze the kinematic characteristics of an RRR-RRP six-bar linkage with a clearance joint. The contact force model and the contact force entropy weight are introduced in Section 1. In Section 2,the contact force model of the six-bar linkage with a clearance joint is combined with the entropy weight method used in information theory.It is also in Section 2 that the mathematical model and calculation flow of“contact force entropy weight” are established and the RRRRRP six-bar linkage with a clearance joint is modelled. In Section 3,the optimal number of subsequent simulation data is determined through verifying the influences of the number of simulation data and information entropy and entropy weight.In Section 4,two different simulation cases are designed based on the change of clearance and angular velocity to analyze the simulation results of clearance and angular velocity. Contact force entropy weight is used to investigate the influence on an RRR-RRP six-bar linkage with a clearance joint. The purpose of the contact force entropy weight proposed herein is to provide a new analytical model for the optimization of mechanism with clearance joints. Conclusions are drawn in Section 5.
2. Contact force entropy weight
To study the contact collision situation prevailing in an RRR-RRP six-bar linkage with a clearance joint, a contact force model for the clearance joint must be established.
2.1. Contact force on a mechanism with a clearance joint
The normal contact force model is LN model:[36]this model is a nonlinear spring damping model proposed by Lankarani and Nikravesh, which is based on Hertz contact theory and relies on increasing the influence of the recovery coefficient. The LN model is widely used in the dynamics research center of mechanisms with clearances because it considers some factors such as impact velocity and local deformation. Secondly, in the dynamic simulation analysis of the clearance mechanism,the friction acting on the clearance joint should also be considered,because friction will affect the dynamic response of the whole clearance mechanism. A modified Coulomb friction model is used for tangential friction at the clearance joint. Finally, axial contact forces are also included, because axial contact forces affect such clearance joints.[37]On condition that the axis of the shaft is parallel to the axis of the hole body,an axial force will be generated when the stopper blocks at both ends of the shaft contact the external wall of the hole.Hence,normal contact force can be expressed as

whereKis the contact stiffness coefficient of the collider,δis the elastic deformation,δis the relative displacement and ˙δis the relative velocity of two objects in contact,ndenotes the power exponent.Cis the damping coefficient in the collision process and expressed as

whereηis the viscous damping factor andceis the coefficient of recovery. In Eqs.(1)-(3), ˙δ(-)is the initial relative velocity at the point of collision.
Tangential friction force can be presented as

wherevtis the velocity component in the tangential direction,FNis the normal contact force, andµ(vt)represents the friction coefficient. The friction coefficient can be expressed as

wherevdis the maximum critical velocity of dynamic friction,vsis the critical velocity of static friction,µdis the sliding friction coefficient,andµsrefers to the static friction coefficient.
Axial contact force can be presented as

whererkois the external surface radius of hole andrkis the radius of the pore body.
2.2. Meaning of contact force entropy weight
Contact force is an important index used to study the kinematic characteristics of a six-bar linkage with a clearance joint. The theory of information entropy is used in the nonlinear quantitative analysis of the mechanism with clearance joint. However, the influence degrees of different factors on the contact-force nonlinearity of the mechanism with clearance are not solved. Lack of an index to evaluate the influence of this factor on the contact force non-linearity remains a problem. The contact-force entropy weight is a method,which reflects the influence degree of velocity,clearance,and other factors on the contact force of mechanism with clearance. The factors affecting the contact force on the mechanism with clearance include clearance size, angular velocity, and hole shaft size. The contact force entropy weight is used to determine the weight of the influence of the contact force in theX,Y, andZdirections under the index according to the amount of information contained in the contact force in three directions under each influencing factor. The influences of clearance size, angular velocity, hole shaft size, and other influencing factors on the contact force in theX,Y,andZdirections of the mechanism with clearance are different,therefore,it is necessary to calculate the contact force entropy weight for each factor to evaluate the primary and secondary relationship of the degree of influence of contact force in each of three directions of the mechanism with a clearance joint.Thus, the influences of different factors can be evaluated objectively,stably,and accurately.
3. Contact force entropy weight and information entropy
Contact-force entropy weight and power spectrum information entropy are the analytical methods chosen in this paper.For this reason,in this section the flow chart of calculating the contact-force entropy weight is designed,the power spectruminformation entropy is referred,and the contact-force entropy weight mathematical model is put forward.
3.1. Flow chart of entropy weight calculation
Firstly, the process of information entropy and entropy weight method is summarized. Then,by combining the RRRRRP six-bar linkage with a clearance contact force characteristics,the calculation flow chart is designed as shown in Fig.1.The specific steps are as follows.
(i) The RRR-RRP six-bar linkage with a clearance joint is simulated to acquire the contact force data in theX,Y,andZdirections. By calculating the power spectrum information entropy, the influence of data size on information entropy is obtained,and then the number of the following simulation data is determined.
(ii) Establishing the initial judgment matrix. The influencing factors and conditions are changed to run the simulation again.According to the data obtained from the simulation,the contact force simulation data in theX,Y,andZdirections are integrated together to establish the initial judgment matrixM.
(iii)Data standardization.The data in the initial judgment matrix are standardized, and Min-Max normalization is used to normalize the initial judgment matrixM, so that the original data fall uniformly within the interval[0,1]. The standard judgment matrixFis thus deduced; because the models used for the contact forces in theX,Y, andZdirections are different, the data pertaining thereto must be standardized. The purpose of this is to ensure the reliability of the data,eliminate the differences in attributes and orders of magnitude existing in various influencing factors,and reduce the influence of the contact force data with higher values due to the large data differences,thus weakening the role of the contact force data with smaller values.
(iv)Computing information entropy. The relative proportion of each influencing factor is calculated,and the information entropyEof each influencing factor in the standard judgment matrixYis calculated according to the definition of information entropy.
(v) Calculating contact force entropy weight. The entropy weightWiof each influencing factor is calculated according to the information entropyE. Contact force entropy weight is used to ascertain the degree of influence of each influencing factor on the contact force in each of three directions of motion of the RRR-RRP six-bar linkage with a clearance joint,and finally the influence is fed-back to the RRR-RRP six-bar linkage with a clearance joint,to provide a reference for mechanism optimization.
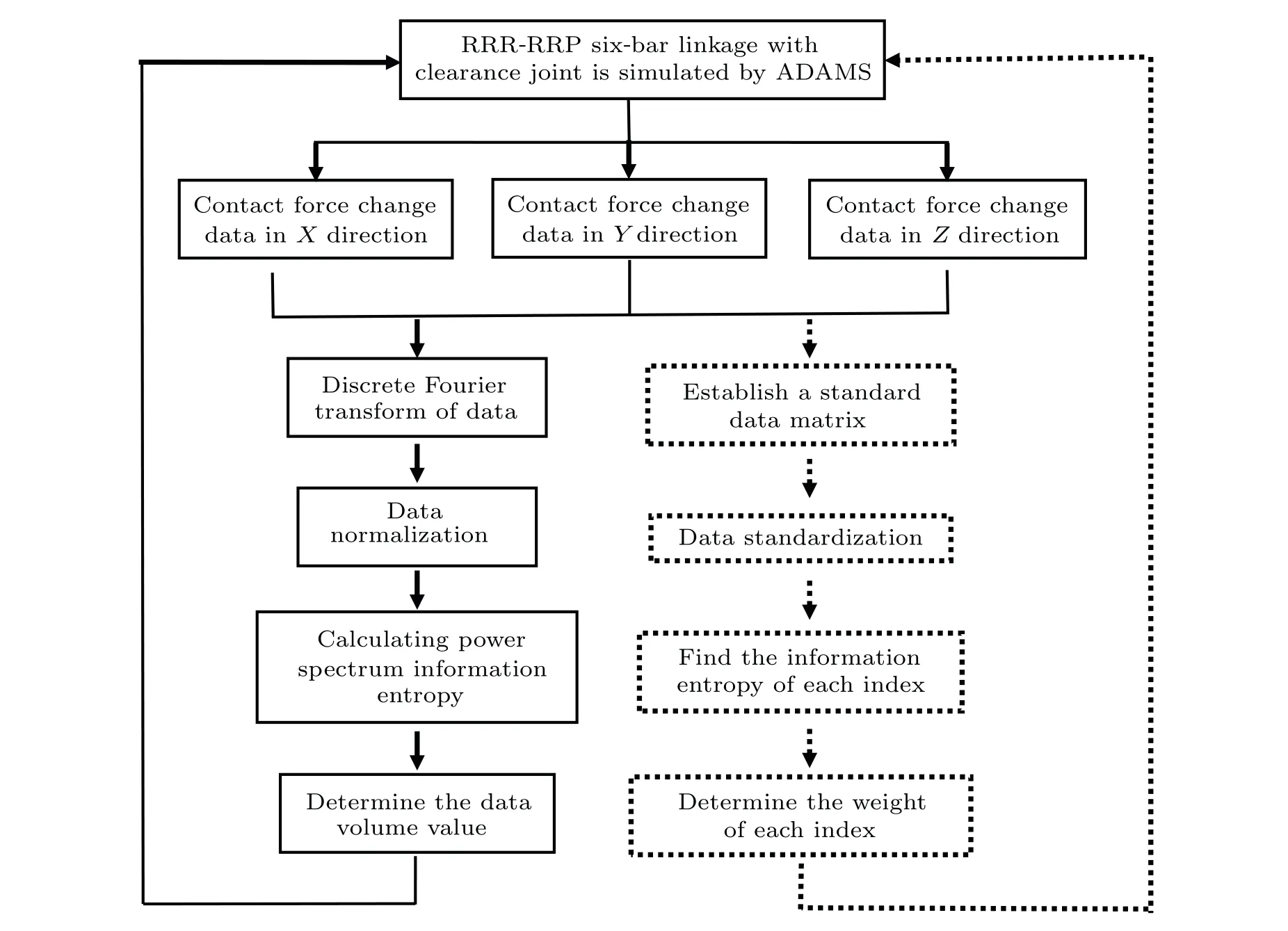
Fig.1. Flow chart for calculating contact force entropy weight.
3.2. Power spectrum information entropy
Before calculating the entropy weight, it is necessary to understand the calculation process of information entropy.Information, together with matter and energy, is one of the three basic elements that constitute the world and human beings depend on these for survival. The concept of entropy first appeared in the field of physics. In 1865, it was proposed by the German physicist Clausius. In 1877, Ludwig Edward Boltzmann proposed a statistical-physics-based explanation of entropy, which explained that the statistical law in the microscopic state of a system would determine the macrocharacteristics of the whole system. The entropyScan be express as[38]
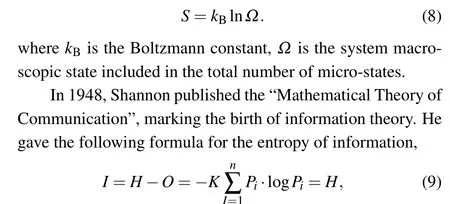
whereHis the average information(uncertainty)of the event set;Iis the amount of information provided by the occurrence of the event;Piis the probability of thei-th message;Nis the total number of messages;Kis a constant.
Information entropy can be combined with different analytical methods to establish different measures of information entropy.[39]The power spectrum information entropy is used here. The power spectrum information entropy is used to quantitatively calculate the uncertainty of a signal power spectrum,thus,the power spectrum entropyHof the signal in the frequency domain can be defined as

whereqiis the proportion of thei-th spectral value within the entire power spectrum,and can be expressed as

whereLiis thei-th power spectrum value.
3.3. Mathematical model for contact force entropy weight
To calculate the contact force entropy weight,we should first analyze the different contact forces under various influencing factors. According to the contact force model of the mechanism with a clearance joint, there are three different contact force models, which are the normal contact forceFN,tangential contact forceFM, and axial contact forceFT. Contact forces in theX,Y,andZdirections are obtained by combining the three contact force models for simulation. The vector set of contact force entropy weights is recorded as[F1,F2,F3]. If there arenitems of data size in each contact force entropy weight set,the initial judgment matrixMcan be express as
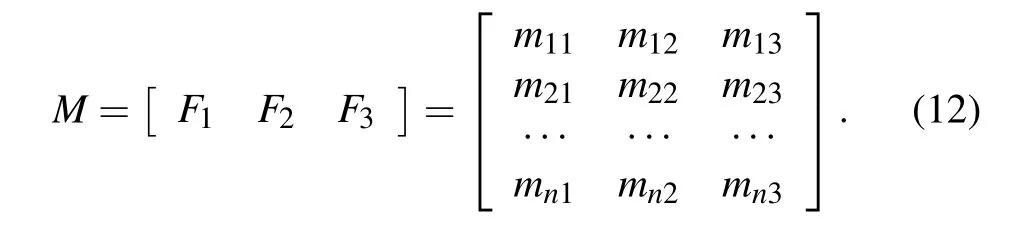
The contact forces in theX,Y, andZdirections are obtained by integrating the three contact force models and simulation outputs.The vector set of entropy weights of the contact force is denoted as[F1,F2,F3],andnis the number of items of data. In the above judgment matrix, each row represents different contact forces at the same time, and the same column represents the contact force data at different times for the same contact force.
Min-max standardization is used to standardize the data of each indicator, so that the values in the standard judgment matrix are within the interval of[0,1]. Min-max standardization is defined as
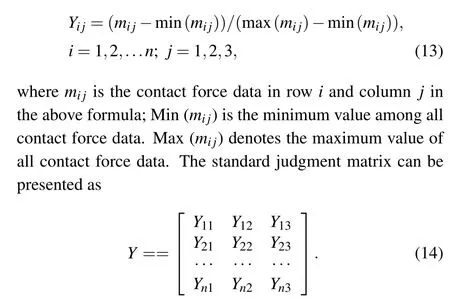
According to the definition of information entropy,the information entropy value of each influencing factor in the standard judgement matrixYis calculated.

wherepijis the degree of influence of contact force in theX,Y,andZdirections at a given time on the contact force entropy weight of the six-bar linkage with a clearance joint, andKis the coefficient of proportionality based on the change in data volume. TheKandpijare given by

wherekis the total number of information entropy weights andEjis the information entropy. Entropy weight is essentially a measure of the usefulness of information. The larger the entropy weight, the greater the influence on the contact force nonlinearity of the six-bar linkage with a clearance joint is.
进入系统前,用户需要先登录(用户分为管理员用户和普通用户),登录界面如图2所示。管理员和普通用户对应的权限不同,管理员可操作功能最多,下面以管理员用户登录后进入主界面如图3所示。
4. Case study
In this section, three simulations are designed based on the RRR-RRP linkage with a clearance joint. The first simulation verifies the value of the model data volume, the second simulation explores the influence degree of different clearances on the contact-force entropy weight, and the third simulation ascertains the influence degree of different angular velocities on the contact-force entropy weight.
4.1. RRR-RRP six-bar linkage with a clearance joint
Figure 2 shows the RRR-RRP six-bar linkage, which is composed of five rotating joints and one sliding joint that allows linear motion. Compared with the crank slider mechanism,it has the advantages of good quick-return performance and good force enhancement effect: it is often used in feeding mechanisms,pressure mechanisms,etc.The six-bar linkage is disassembled into part ABCD and part CDE.The front part is an RRR(three revolute joints)mechanism,the back part is an RRP (two revolute and one prismatic joints) mechanism; the original moving part is a bar AB, and the slider E completes the linear motion. During simulation,the clearance is set at D,because rod CD is both the follower and the original actuator of the RRP mechanism. This design considers the nonlinear behavior at D relatively obvious.
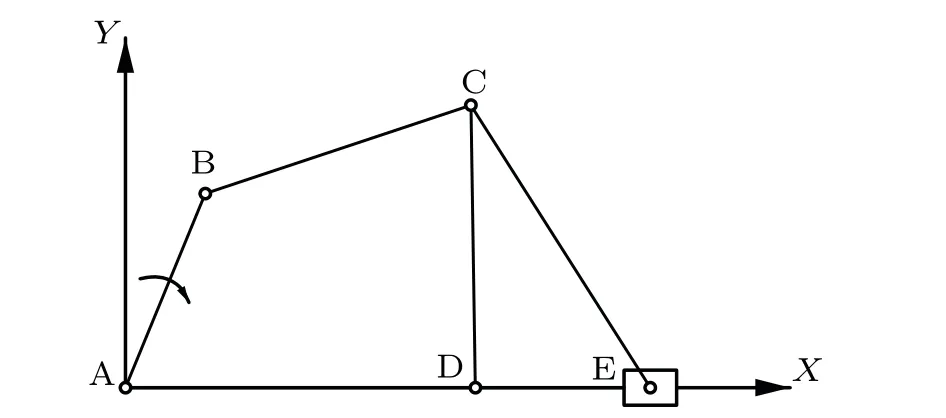
Fig.2. Schematic diagram of an RRR-RRP six-bar linkage.
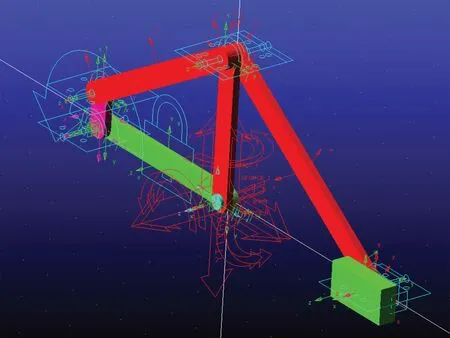
Fig.3. Simulation model of an RRR-RRP six-bar linkage with a clearance joint.
In the AMADS, the basic RRR-RRP six-bar linkage is first established and corresponding motion joints are added.Then, by adding the actuators already written, the rotating joints at D is changed into one with clearance. The results are demonstrated in Fig.3,which provides a basis for subsequent simulation.
In the ADAMS, the linkage dimensions are shown schematically in Fig. 4. The model parameters for the RRRRRP six-bar linkage with a clearance joint are shown in Table 1.
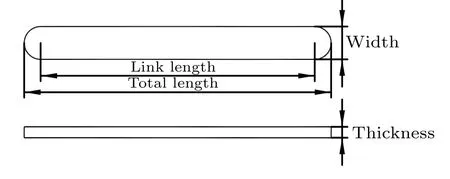
Fig.4. Schematic diagram of linkage dimensions.
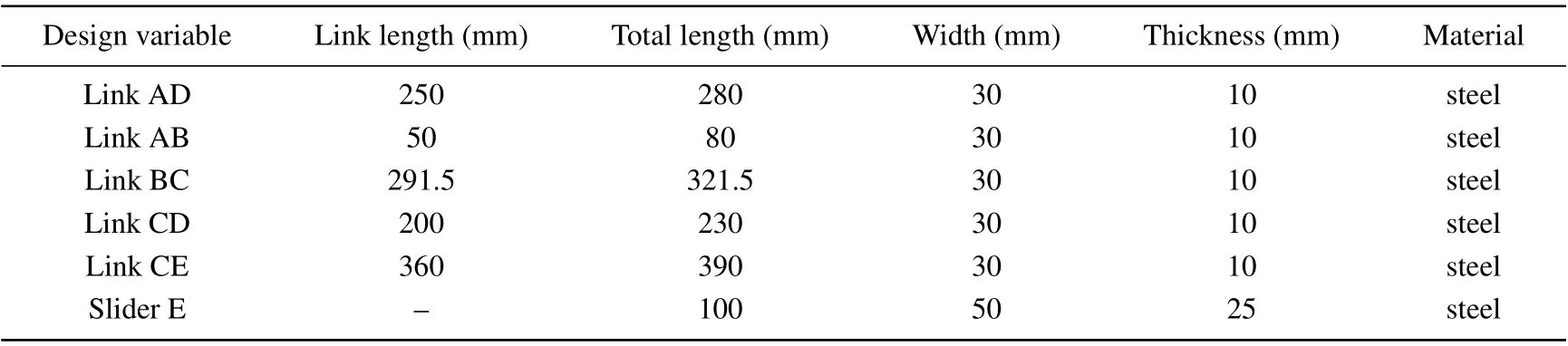
Table 1. Model parameters of RRR-RRP six-bar linkage with a clearance joint.
4.2. Determining data volume of simulation
To ensure the accuracy of the contact force entropy weight calculated from the data from two subsequent simulation experiments,the RRR-RRP six-bar linkage with a clearance joint is simulated under the same conditions,but the number of simulation data is varied,and the power spectrum information entropy is calculated. The simulation conditions are set as follows: clearance is 0.2 mm,angular velocity is 2πrad/s,and simulation time is 7 s(seven cycles)to obtain the contact force data in theX,Y,andZdirections,and one cycle after each set of data is stable,which are taken as the data to calculate the power spectrum information entropy. The results are listed in Table 2.
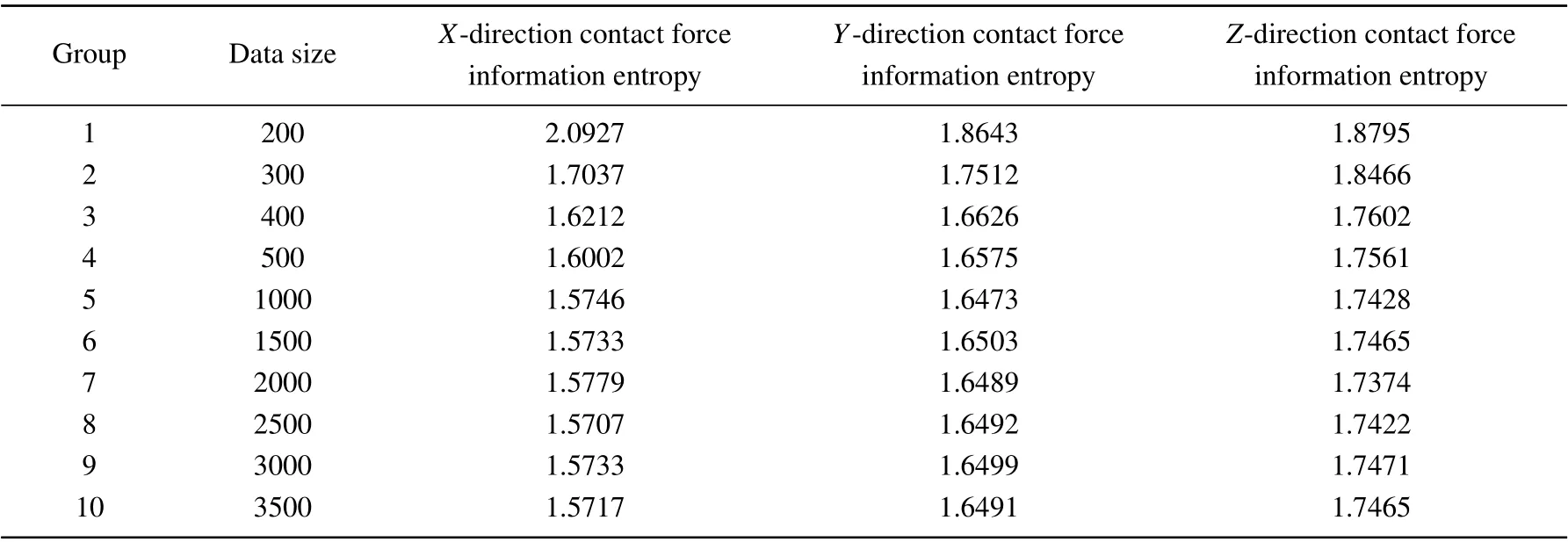
Table 2. Contact force information entropy in the X,Y,and Z directions.
Origin software is used to draw the original data of the simulation. Figures 5(a)-5(j)show 10 groups of contact force data:there are small fluctuations in the contact forces in different directions, leading to nonlinear behavior. We plot a line diagram by using the contact force information entropy in theX,Y,andZdirections in the table as shown in Fig.5(k). The information entropy line chart shows the changing trend of information entropy. As can be seen from the contact force information entropy in Fig.5(k),with the number of data increasing,the power spectrum information entropy in theX,Y,andZdirections gradually tend to a stable value. As seen from Fig.5(k),the contact force information entropy in theXdirection finally converges to 1.57;theY-direction contact force information entropy finally converges to 1.65;the contact force information entropy in theZdirection finally converges to 1.74. When performing simulations in ADAMS, the settings for the data size affect the final simulation results. The larger the data size,the more precise the simulation results is,but the less efficient the simulation. Considering the precision and efficiency of the simulation, it is necessary to find the optimum data size for the RRR-RRP six-bar linkage with a clearance joint. There are two criteria for evaluating the best data size: one is to reduce the data size as large as possible to increase the efficiency of the simulation,and the other is that the data size should be chosen after the simulation results are stable.Therefore according to Fig.5(k)it can be seen that from the fifth group onward,subsequent changes in data volume have little effect on the simulation results and therefore 1000 data volumes per second are taken as a criterion for evaluation.

Fig.5. Contact force data and contact force information entropy.
4.3. Simulation and simulation conditions
There are many factors that affect the contact forces,such as clearance,angular velocity,size of hole shaft,and flexibility.Here we study the influences of angular velocity and clearance on the size of the contact forces in theX,Y, andZdirections,therefore, the simulation of two different influencing factors is realized. One only changes the radial clearance size (group 1-group 5),and the other only changes the angular velocity(group 2,group 6-group 9). The specific parameters are summarized in Table 3.

Table 3. Simulation parameters of RRR-RRP six-bar linkage.
Both simulations change only one parameter at a time.In the first simulation, only the radial clearance is changed,and the time required for each cycle remains unchanged, so the number of data for each cycle is the same: 2000 data are taken per cycle to ensure accuracy when calculating the entropy weight of contact force information. The second simulation changes the angular velocity,resulting in different cycles of time and different numbers of data.For this reason,the data size in one cycle is lower at low speeds,however,it has been proved in the last section that when the data size in each cycle reaches a certain value,the result is unaffected.
4.4. Contact force entropy weight and data analysis
The simulated data and results are shown in Fig. 6 and represent those collected within one cycle at clearances of 0.1 mm to 0.5 mm, respectively. MATLAB is used to calculate the information entropy weights: the results are listed in Table 4.
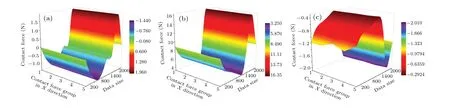
Fig.6. Contact force data in different directions: (a)X direction,(b)Y direction,and(c)Z direction.
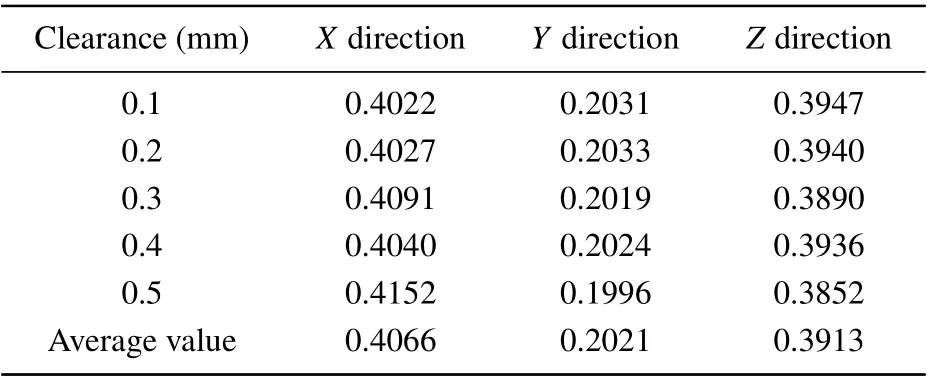
Table 4. Contact force entropy weights in different clearances.
The entropy weights under different clearances are plotted in Fig. 7, and the average entropy weight is plotted on a radar chart(Fig.8).
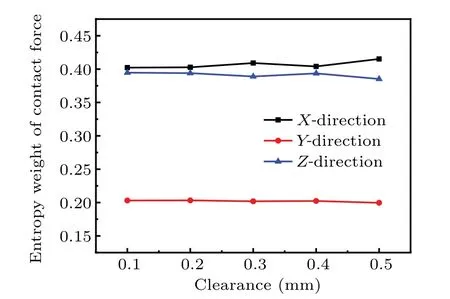
Fig.7. Contact force entropy weight in different clearances.
Figure 7 shows the changing trend of contact force entropy weight, demonstrating the average degree of influence of contact forces in different directions. As can be seen from Fig.7,when only the radial clearance is changed,the entropy weight of the contact force in each of the three directions fluctuates less, indicating that the entropy weight of the contact force in theX,Y, andZdirections does not change readily withtclearance. As can be seen from the average entropy weight diagram in Fig. 8, the entropy weight of the contact force in theXdirection is similar to that in theZdirection,and far greater than that in theYdirection. This indicates that the clearance has a greater influence on the contact forces in theXandZdirections of the RRR-RRP six-bar linkage with a clearance joint(about twice that in theYdirection).
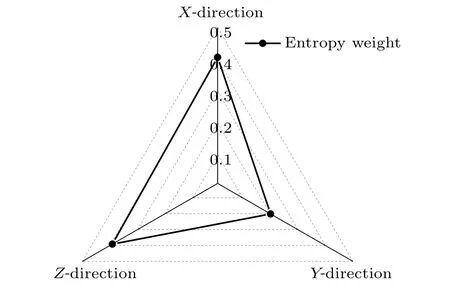
Fig.8. Average contact force entropy weight in X,Y,and Z directions varying with clearance.
The same method is adopted to calculate the contact force entropy weight for the simulation data at different angular velocities, and the obtained results are listed in Table 5. The obtained data are also illustrated in Fig.9.
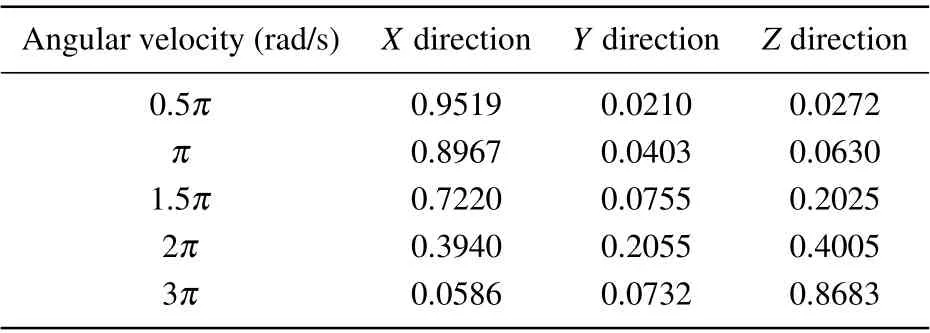
Table 5. Contact force entropy weight with different angular velocities.
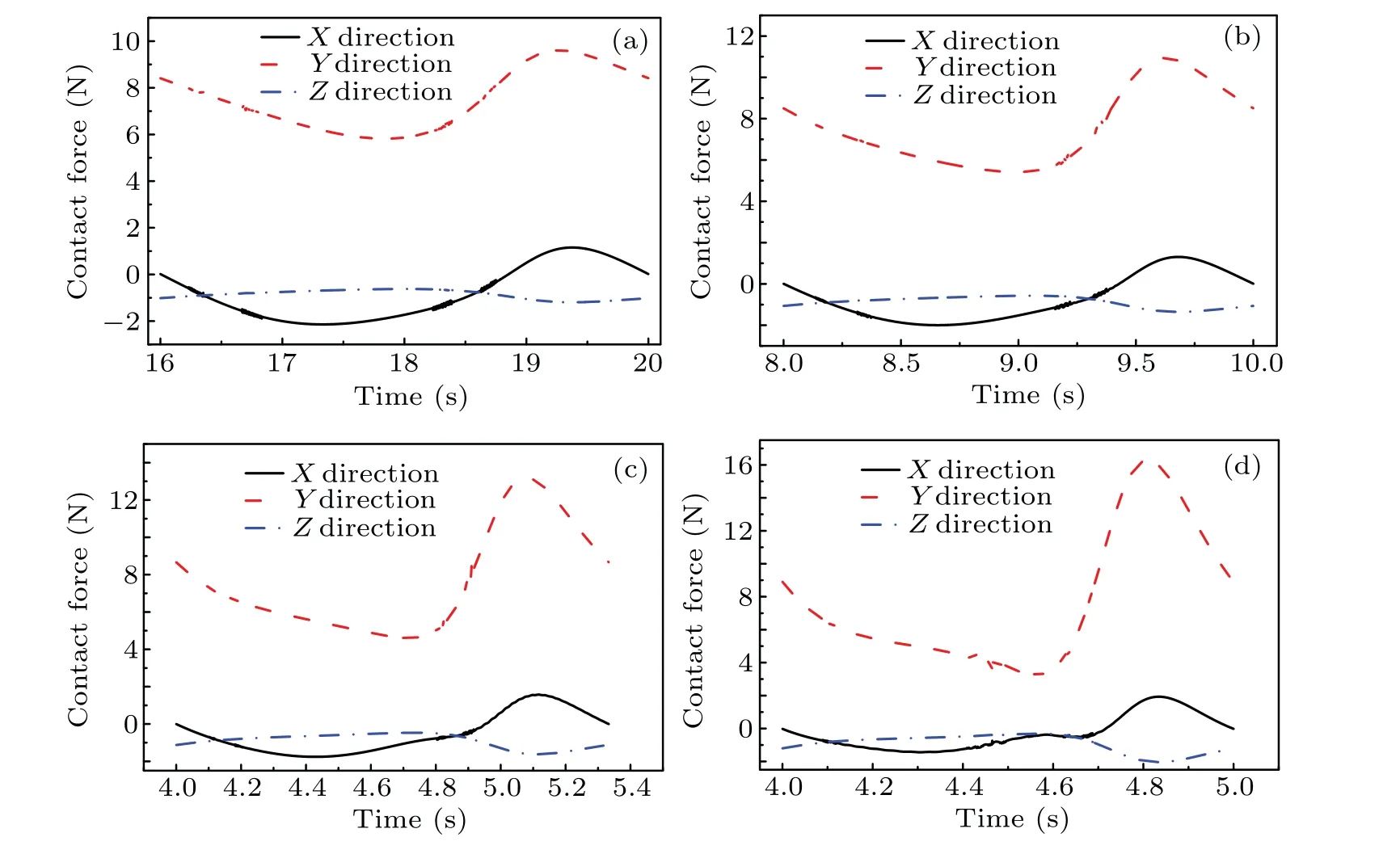
Fig.9. Contact forces at different angular velocities: (a)0.5π rad/s;(b)π rad/s;(c)1.5π rad/s;(d)2.0π rad/s.
The entropy weights under different clearances in the table are plotted,as a line graph(Fig.10(a));the entropy weight is plotted on a radar chart(Fig.10(b)).
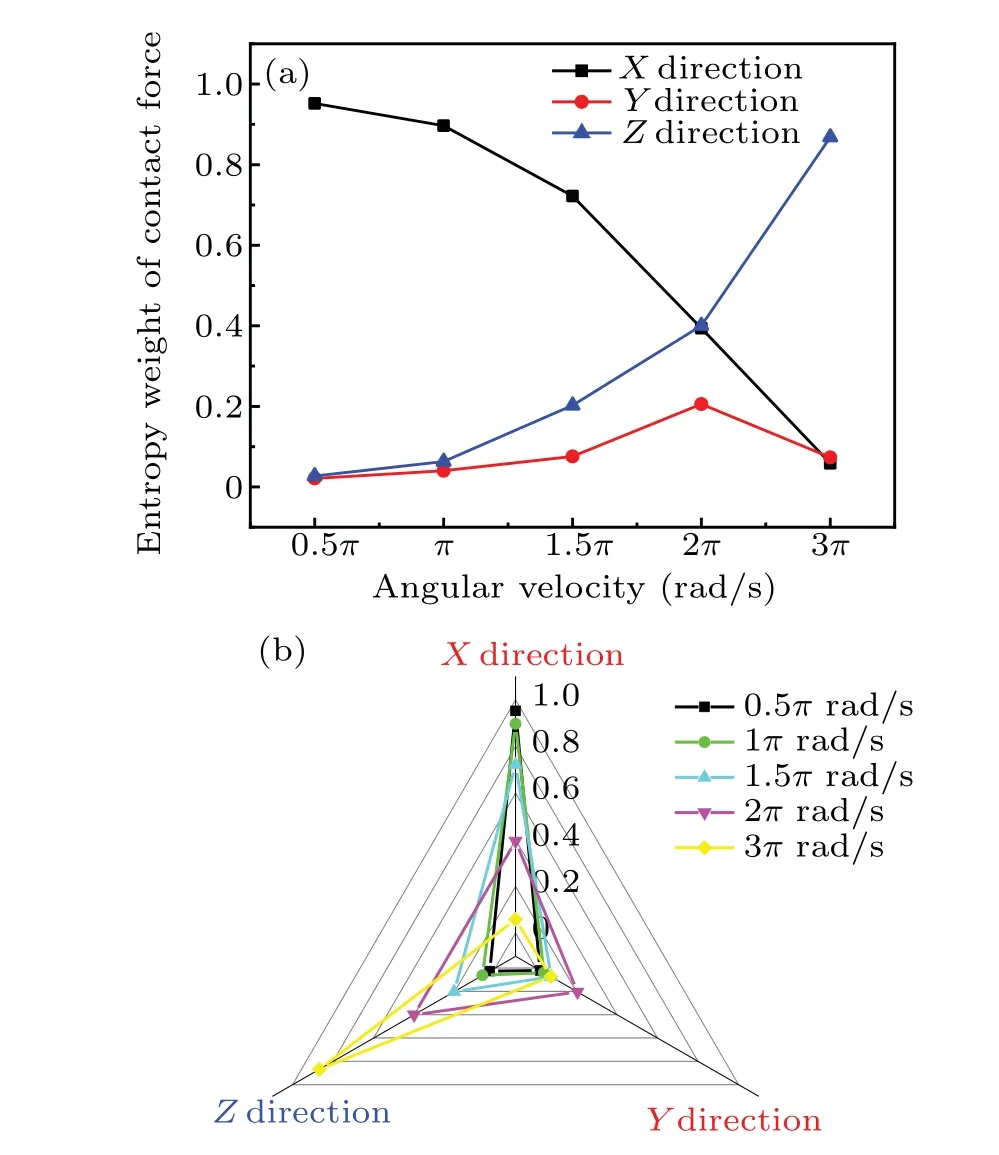
Fig.10.(a)Contact force entropy weight and(b)radar chart of contact force entropy weight.
Figure 10(a) shows the changing trend of contact force entropy weight. Figure 10(b)shows the change in the degree of influence on the contact force in different directions. As seen from Fig.10(a),with the increase in angular velocity,the entropy weight of contact force in each of the three directions varies: the proportion of entropy weight of the contact force in theXdirection decreases continuously. The entropy weight of the contact force in theYdirection first increases,then decreases when it reaches 2πrad/s. The entropy weight of the contact force in theZdirection increases continuously. This shows that with the increase in velocity,the influence of clearance on the contact force in theXdirection of RRR-RRP sixbar linkage with a clearance joint diminishes;the influence of the contact force in theYdirection remains low, and the influence on the contact force in theZdirection increases. By analyzing the results of simulations 1 and 2, it can be found that the results of the second group in simulation 1 and the fourth group in simulation 2 are similar,suggesting a correlation between the two simulations.
5. Conclusions
In this paper, we propose a quantitative analysis method for mechanisms with a clearance based on the contact force model of joints with a clearance and the entropy weight method, called the entropy weight of the contact force. The contact force entropy weight method can be used to assess the degrees of influence of different influencing factors on the RRR-RRP six-bar linkage with a clearance joint in a more objective manner. In order to evaluate the feasibility of the method,the contact force entropy weight model is used to analyze the degrees of influence of clearance and angular velocity on the contact forces in theX,Y, andZdirections. Then,before the simulation of two groups of different variables,the changing relationship between the number of simulation data and the information entropy is determined. This makes the quantity of data and the weight of contact force entropy more accurate. After that,We verify the validity of the contact force information entropy model with two simulations.
In reality, there is a discrepancy between the degree of influence of velocity and clearance on the contact force of an RRR-RRP six-bar linkage with a clearance joint and the calculation model. On the one hand, the error comes from the simulation of the model,and on the other hand,it arises from systemic error in the calculation model itself,therefore,in the calculation of the contact force entropy weight, the proposed method first determines the value of the data size required,thus minimizing the aforementioned discrepancy. At the same time,the purpose of using the contact force entropy weight is to analyze a trend in the degree of influence of different factors within the allowable tolerance, to guide the optimization of the mechanism with clearance, proving the significance of the contact force entropy weight technique.
Acknowledgement
Project supported by the National Natural Science Foundation of China(Grant No.51875531).
猜你喜欢
儿童时代·快乐苗苗(2022年2期)2022-04-19
新闻世界(2021年12期)2021-12-20
恋爱婚姻家庭(2021年17期)2021-07-16
儿童时代·快乐苗苗(2021年1期)2021-03-16
少先队活动(2020年8期)2020-12-18
少先队活动(2020年7期)2020-12-18
故事作文·高年级(2020年2期)2020-02-24
家庭影院技术(2019年1期)2019-01-21
江南诗(2016年5期)2016-05-14
共产党员(辽宁)(2012年19期)2012-08-13
- Chinese Physics B的其它文章
- Quantum walk search algorithm for multi-objective searching with iteration auto-controlling on hypercube
- Protecting geometric quantum discord via partially collapsing measurements of two qubits in multiple bosonic reservoirs
- Manipulating vortices in F =2 Bose-Einstein condensates through magnetic field and spin-orbit coupling
- Beating standard quantum limit via two-axis magnetic susceptibility measurement
- Neural-mechanism-driven image block encryption algorithm incorporating a hyperchaotic system and cloud model
- Anti-function solution of uniaxial anisotropic Stoner-Wohlfarth model