机械臂系统在任务空间的脉冲跟踪控制
2022-04-19 06:47戴清霞马米花
海南师范大学学报(自然科学版) 2022年1期
戴清霞,马米花
(闽南师范大学 数学与统计学院,福建 漳州 363000)
近年来,机械系统的控制已经引起了很多领域的广泛关注,其中,机械臂可以根据要求模拟人类的手臂活动,帮助人类完成很多复杂多样的任务,比如高效地完成组装传输等任务,因此,机械臂在工业生产、制造业、医疗等领域有着愈来愈重要的应用[1-3]。在这些应用中,设计精确的控制器确保机械臂有效安全地工作已经成为一个重要的课题。例如,文献[4]提出存在模型不确定性和外部干扰的机械臂的分数阶自适应反步控制,文献[5]通过在常用的PID控制器中添加非线性比例项和导数项,提出非线性比例积分导数控制器。
上述提到的与机械臂有关的控制策略都是基于关节空间分析的。实际上,设计一种控制器确保任务空间中机械臂末端执行器的位置可以跟踪到期望的轨道更具有挑战性。大多数情况下,对于工业机器人来说,所进行的传输、焊接、装配等任务都要求机械臂末端执行器在任务空间中跟踪到期望的轨道。例如,文献[6]提出使用傅立叶级数展开对机械臂的自适应任务空间控制,文献[7]将比例微分方程应用于机械臂任务空间控制,文献[8]提出一种基于观测器的刚性连杆机器人自适应输出反馈跟踪控制器。
虽然关于机械臂在任务空间的控制问题已经有很多成果,但是大部分考虑的是连续控制。实际操作中,由于不对称性的信息、个体感知能力及成本消耗等影响,连续控制往往很难实现。根据文献[9]可知,不连续控制策略比连续控制更有效且成本更低。而脉冲动力学是由连续和离散相结合的动力学行为,通过脉冲约束或脉冲力产生脉冲效应可使智能体的广义位移或速度发生瞬时改变[10-12]。因此,脉冲控制已成为一种有效的不连续控制方法。有关脉冲控制的研究成果也有不少[13-16],比如文献[13]探讨非线性脉冲动力系统的渐近稳定性问题并为混沌系统设计脉冲控制器,文献[14]提出将脉冲控制用于混沌同步的研究,文献[15]提出基于脉冲控制的机械臂系统在关节空间中可以同步到期望的轨道,文献[16]结合事件触发机制提出事件触发脉冲控制器。可是,目前似乎还未见脉冲控制策略用于研究任务空间中机械臂系统跟踪问题的相关成果。所以,本文提出用于任务空间中机械臂跟踪问题的脉冲控制策略,即在任务空间中给定一个期望的时变轨道,机械臂末端执行器能够在设计的脉冲控制器下跟踪到该期望的轨道,并且将跟踪误差控制在期望的范围内。最后将所得到的理论结果用于实现双连杆机械臂的跟踪控制。
1 机械臂系统模型
在没有摩擦和其他干扰的条件下,n连杆机械臂系统在关节空间中的动力学表达式可以用如下的拉格朗日方程描述[17-19]为

对于系统(2),关节空间速度q̇是有界的。选择一个李雅普诺夫函数W(t)=q̇TM(q)q̇,W(t)沿着系统(2)的轨线求导得到



2 脉冲控制策略
在任务空间中,机械臂系统(1)末端执行器的位置被要求跟踪到期望的轨道,即给定一个期望的时变轨道xd(t)∈Rn,本研究的目标是设计脉冲控制器τ使得机械臂系统末端执行器的位置可以跟踪到期望的时变轨道xd(t),并且具有理想误差界。为此,定义跟踪误差为x͂(t)=x(t)-xd(t),基于实用稳定性定义,引入如下的实用跟踪定义。
定义1 任意给定机械臂系统(1)的一个初始条件以及给定h> 0,如果存在常数T0∈R+使得∀t>T0时,有

成立,则称机械臂系统(1)末端执行器的位置可以跟踪到期望的时变轨道,并且称h为期望的跟踪误差界。
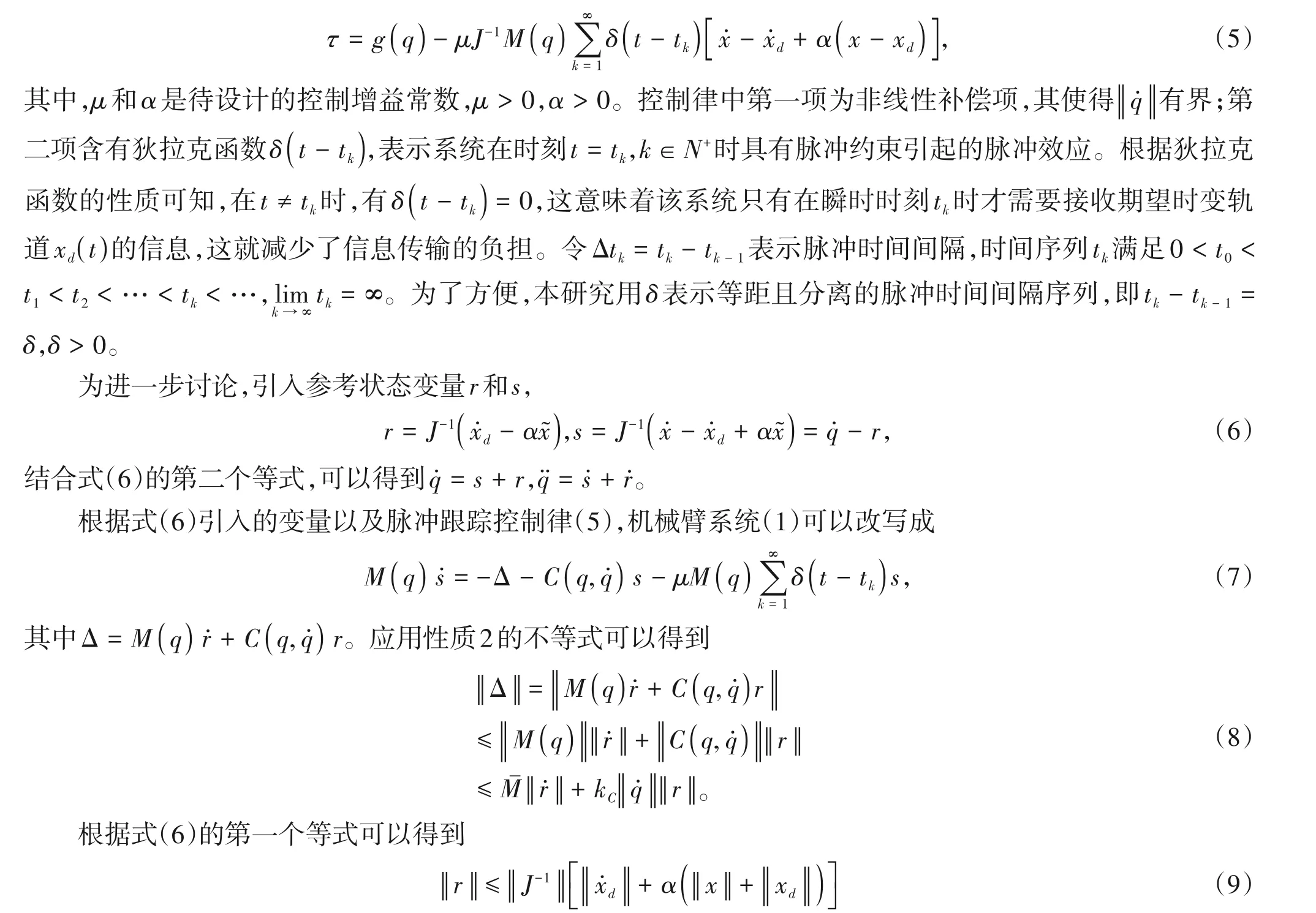
显然,取τ=g(q)无法使机械臂系统(1)达到跟踪控制,下面我们将设计脉冲跟踪控制律来实现机械臂系统(1)在任务空间中的跟踪控制。从物理观点来看,脉冲力或者脉冲约束都会产生脉冲效应,从而导致系统状态的突然改变。此外,狄拉克函数能够很好地描述这种瞬时改变系统状态的演化过程。因此,对机械臂系统(1)设计如下脉冲跟踪控制律

3 代数跟踪判据
为了实现机械臂系统在任务空间的脉冲跟踪控制,本节导出了一些代数通用准则,并设计适当的控制增益μ、反馈增益α和脉冲时间间隔δ使得机械臂系统(1)末端执行器的位置在脉冲跟踪控制律(5)的作用下可以跟踪到期望的时变轨道。下面给出本研究的重要定理。
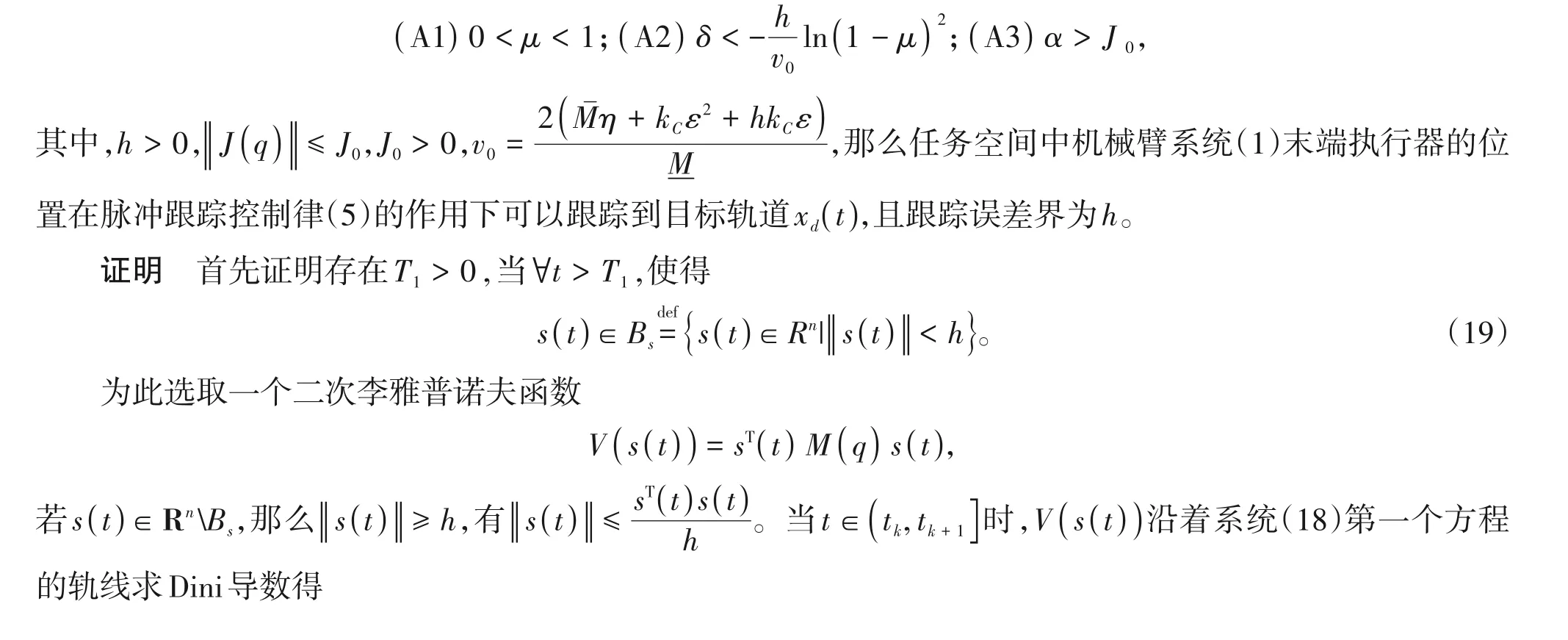
定理1 若控制增益μ、脉冲时间间隔δ和反馈增益α满足

4 应用例子及数值模拟
本节通过数值模拟验证前面提出的脉冲控制器的有效性。以双连杆机械臂作为本文的应用例子,如图1所示。根据文献[9],它的动力学行为可以由拉格朗日方程(1)来描述。

图1 双连杆机械臂[9]Figure 1 Double link manipulator[9]
图1中机械臂关节空间位置定义为q=(q1,q2)T,两个连杆的质量分别定义为m1和m2,下杆和上杆的惯量分别记为I1和I2,其长度分别为l1和l2,而连接点到杆质心的长度分别记为lc1和lc2。拉格朗日方程中的惯量矩阵、矩阵C和广义有势力分别为


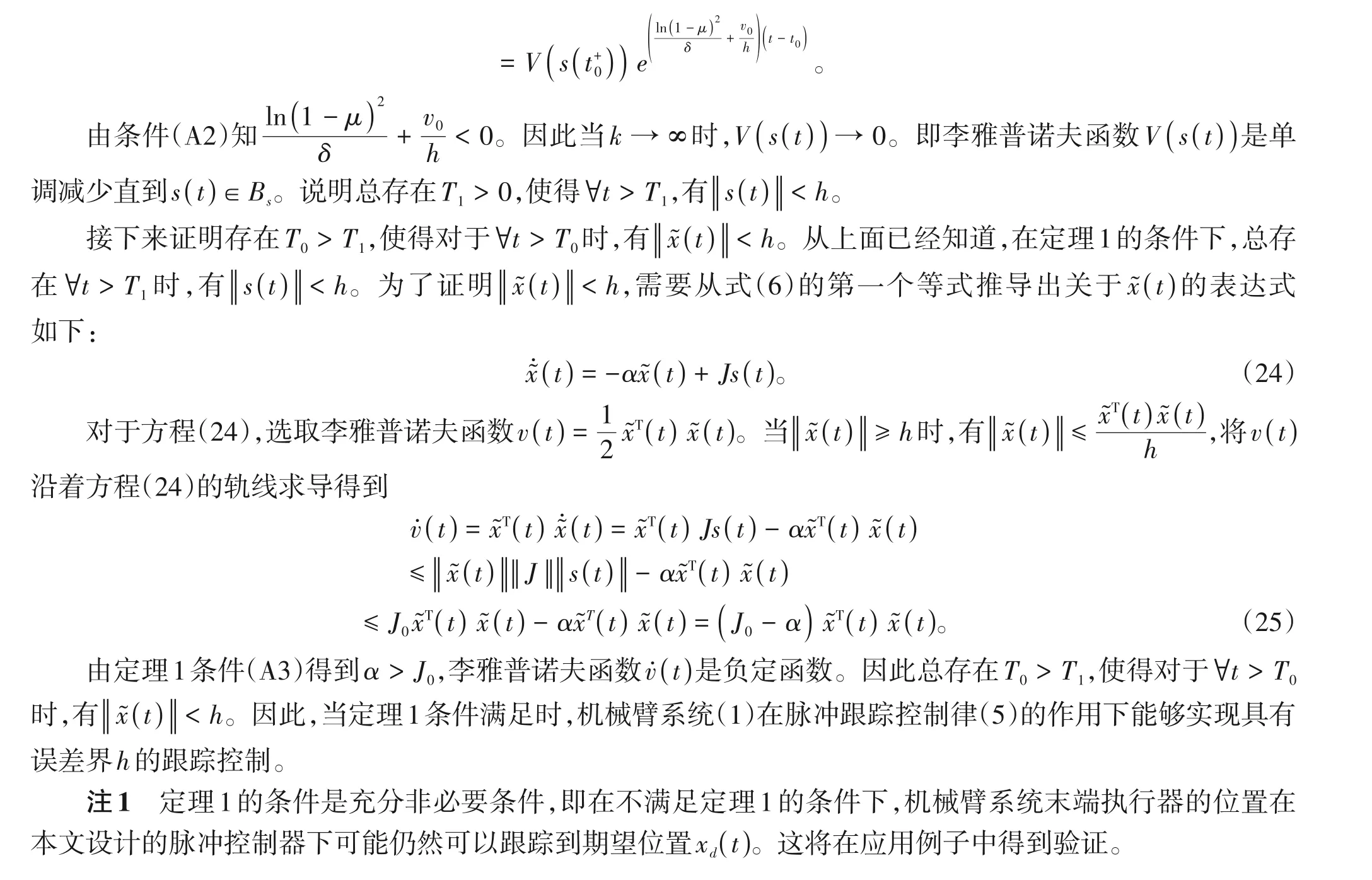
根据注1,定理1的条件是充分非必要的。为了说明这个情况,取脉冲时间间隔δ= 0.5,而其他数据和图2中的数据相同,这时定理1的条件显然不满足,但是模拟结果表明在脉冲控制器的作用下机械臂末端执行器的位置仍然可以跟踪到期望的轨道xd(t),如图4和5所示。和图2相比,图4显示当t> 3时,跟踪误差界仍然小于0.02。因此,正如注1所述,定理1的条件是充分非必要的,这就使得本研究设计的脉冲控制器更加具有实用性。
如果取脉冲时间间隔δ= 1,而其他数据和图2中的数据相同,跟踪误差模拟结果如图6所示,机械臂末端执行器的位置仍然可以跟踪到期望的轨道xd(t),和图2或图4相比,需要更长的时间才能实现跟踪误差控制界h≤0.02。因此,在工程上可以根据需要选取适当的控制参数使得机械臂系统在脉冲跟踪控制律(5)的作用下实现对期望轨道的跟踪控制。
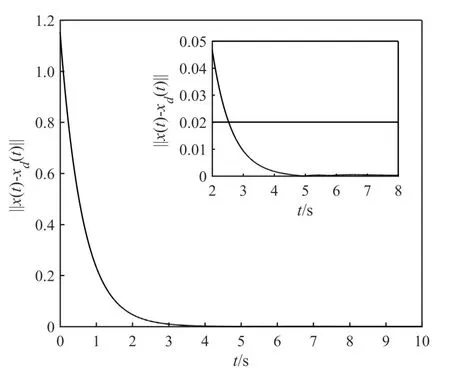
图2 取α = 1.6、μ = 0.98和δ = 0.03时跟踪误差‖x( t )- xd( t )‖的时间演化Figure 2 Evolution of‖x( t )- xd( t )‖with α = 1.6,μ = 0.98 and δ = 0.03
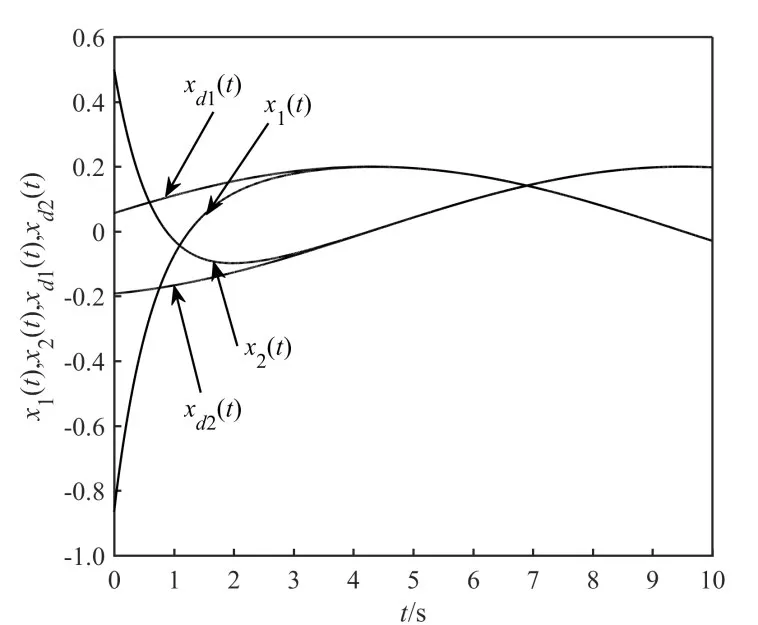
图3 取α = 1.6、μ = 0.98和δ = 0.03时末端执行器的位置x =(x1,x2)T跟踪到期望轨道Figure 3 The end-effector position x =(x1,x2)T can track the desired trajectory when α=1.6,μ=0.98 and δ=0.03
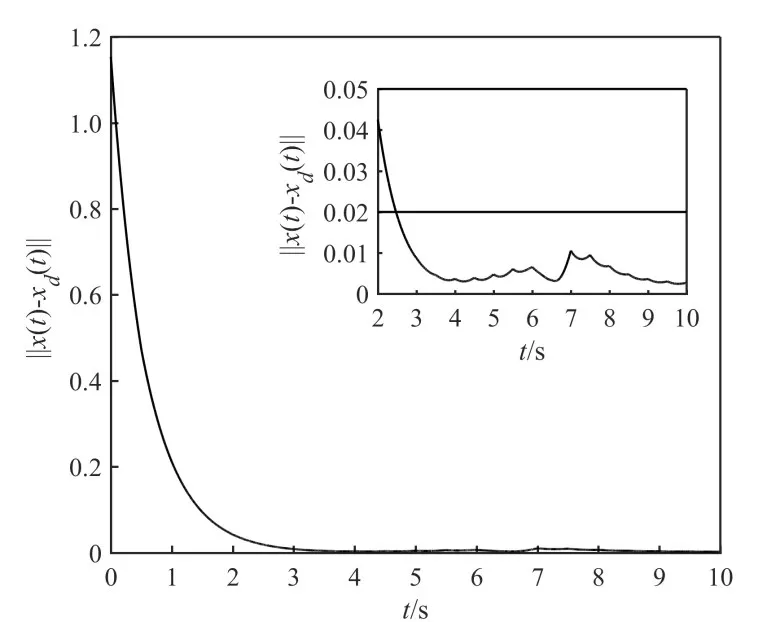
图4 取α = 1.6、μ = 0.98和δ = 0.5时跟踪误差‖x( t )- xd( t )‖的时间演化Figure 4 Evolution of‖x( t )- xd( t )‖with α = 1.6,μ = 0.98 and δ = 0.5
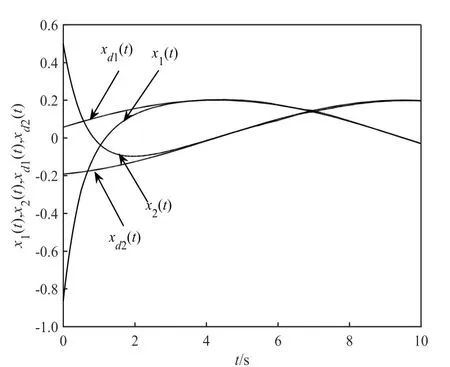
图5 取α = 1.6、μ = 0.98和δ = 0.5时末端执行器的位置x =(x1,x2)T跟踪到期望轨道Figure 5 The end-effector position x =(x1,x2)T can track the desired trajectory when α=1.6 μ=0.98 and δ=0.5
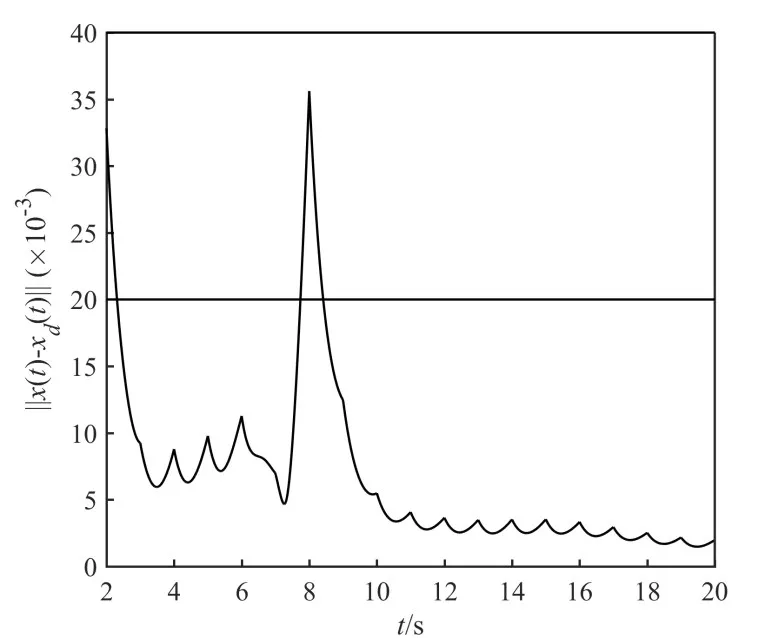
图6 取α = 1.6、μ = 0.98和δ = 1.0时跟踪误差‖x( t )- xd( t )‖的时间演化Figure 6 Evolution of‖x( t )- xd( t )‖with α = 1.6,μ = 0.98 and δ = 1.0
5 结论
本研究设计了脉冲控制实现机械臂系统在任务空间中的跟踪控制。在任务空间中,给定期望的时变轨道,机械臂系统末端执行器能在设计的脉冲控制器下跟踪到期望的位置。通过脉冲控制,机械臂系统不用连续接收期望轨道的信息,只需要在脉冲时刻接收期望轨道的信息。将其应用于双连杆机械臂的跟踪控制,仿真结果表明了本研究提出的脉冲控制策略和代数判据是有效且可行的。
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
汽车实用技术(2022年15期)2022-08-19
都市人(2022年3期)2022-04-27
国际太空(2021年8期)2021-11-05
有色设备(2021年4期)2021-03-16
环球时报(2019-12-05)2019-12-05
汽车维修技师(2019年2期)2019-08-23
制导与引信(2017年3期)2017-11-02
北京航空航天大学学报(2017年10期)2017-04-20