基于探索-利用权衡优化的Q学习路径规划
2022-05-09 13:53彭云建
计算机技术与发展 2022年4期
彭云建,梁 进
(华南理工大学 自动化科学与工程学院,广东 广州 510640)
0 引 言
随着人工智能的发展,能自主移动的智能体机器人在工业、军事以及医疗领域得到广泛使用[1],路径规划要求智能体避开障碍物,找到从出发点到目标点的最佳或次优路径[2],是移动智能体被广泛使用和发挥价值的基础。其中未知环境下的路径规划是研究的难点和热点,目前主要的方法有人工势场法[3]、神经网络、遗传算法、粒子群等智能算法[4]。
在利用强化学习解决未知情况下的路径规划方面,M.C. Su等人提出在路径规划的理论中增加强化学习方法[5]。沈晶等人提出基于分层强化学习的路径规划的方法[6]。Y. Song 等人提出一种有效的移动机器人Q学习方法[7]。然而,在利用强化学习解决路径规划时,都会遇到强化学习本身固有的问题,即探索-利用问题[8]。为了解决探索-利用问题,目前提出的方法有ε贪婪方法和对其改进的ε-first方法[9]、ε-decreasing方法[10],还有梯度算法[11]、value difference based exploration(VDBE)方法[12]等,但各有优点和不足,仍然有优化的空间。
该文根据优化ε值的改变方式和利用动作价值来动态选择采取的动作的思想,提出了基于探索-利用权衡优化的Q学习路径规划方法,解决移动智能体在未知环境下的路径规划问题。
1 探索-利用权衡优化的Q学习算法
为了实现智能体在未知环境下的路径规划,基于探索-利用权衡优化的Q学习路径规划可以分为两个部分,一是利用强化学习中Q学习不需要事先知道环境,智能体依然能与未知环境的互动中学习的特点,通过获得足够的幕数学习经验,不断更新Q表的动作价值,进而不断更新优化路径规划策略,实现路径规划;二是利用提出的εDBE方法和AεBS,权衡强化学习中固有的探索-利用问题,提高未知环境下路径规划的快速性。
基于探索-利用权衡优化的Q学习路径规划如图1所示。提出改进探索-利用权衡问题的εDBE方法和AεBS方法,着重优化ε值的改变方式和利用Q表中的动作价值来动态选择采取的动作,通过智能体与环境互动产生每幕学习经验来影响Q表动作价值的评估,进而获得更优动作行为、更新获得更优路径规划策略。
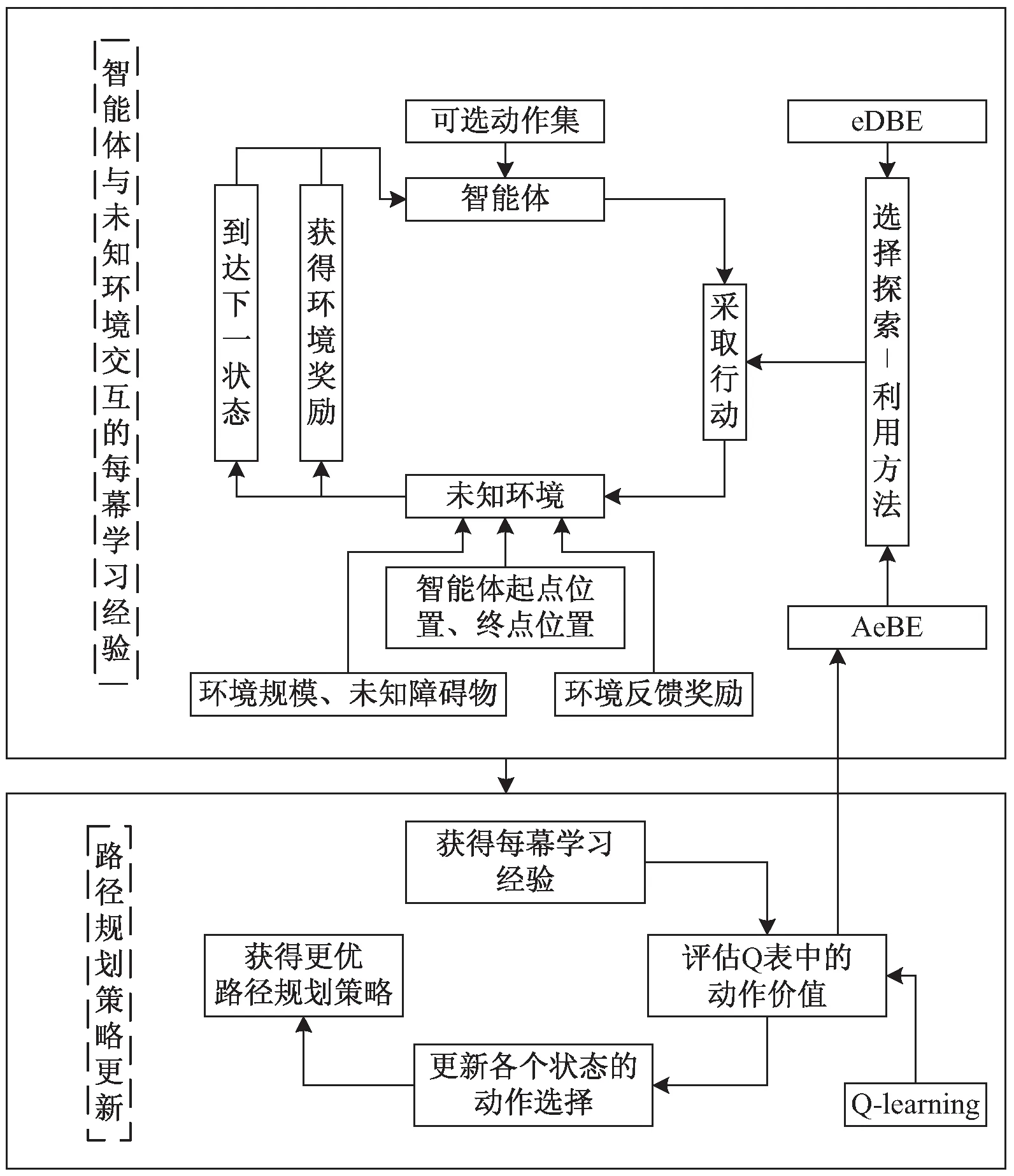
图1 探索-利用权衡优化的Q学习路径规划
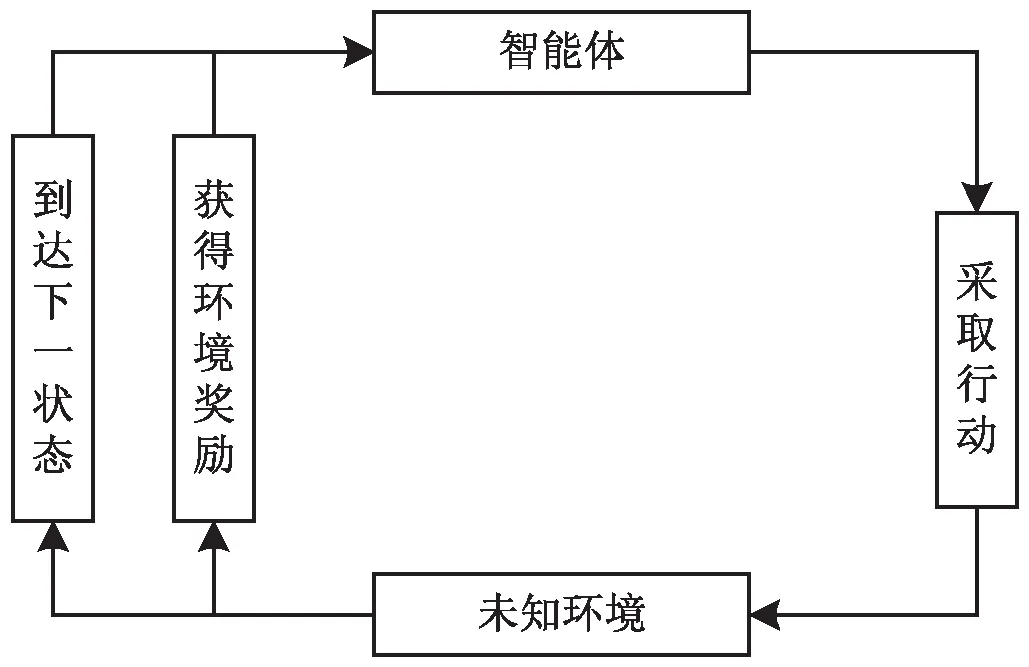
图2 智能体与环境交互图
智能体与环境交互如图2所示,每幕学习经验定义如下:在t时刻,智能体处于状态st,采取动作at,因此在t+1时刻,智能体获得来自环境的奖励rt+1,并在环境中发生了状态转移,到达了状态st+1。在智能体与环境的不断交互过程中可获得一个状态、行动、奖励的序列:s0,a0,r1,s1,a1,r2,s2,a2,r3,s3,…,sT,其中T是终止时刻,这样有终止状态的一个序列也称为一幕(episode)学习经验。
2 改进探索-利用权衡问题的εDBE方法和AεBS方法
2.1 权衡探索-利用问题的基本方法
为了解决强化学习固有的探索-利用问题,经典的Q学习算法中采用了ε-贪婪方法。之后有研究人员提出了改进ε-贪婪方法的ε-first方法、ε-decreasing方法,都是为了更好权衡探索-利用问题,提高Q学习算法解决问题的能力。
2.1.1ε-贪婪方法
ε-贪婪方法的思想是设定一个小的贪婪探索系数,0<ε≤1,在选择要采取哪个动作时,有ε的概率从所有可选的动作中随机选择,有1-ε的概率选择目前能获得最大回报的动作。可用式(1)表示:

(1)
其中,π(a|s)为在状态s下选择动作a的概率,m为状态s下动作集合A(s)中动作a的总个数,a∈A(s),a*为状态s下的最优动作。
2.1.2ε-first方法
ε-first方法[9]的思想是一开始将ε的值设为1,让智能体处于完全探索状态,一段训练幕数(episode)之后,将ε的值设为0,让智能体处于完全利用环境状态。可用式(2)表示:

(2)
其中,episode为幕数变量,preset_episo为预先设定的幕数值。
2.1.3ε-decreasing方法
改进的ε-decreasing方法[10]是ε-贪婪方法和ε-first方法的折中,思想是初始将ε设为一个较大的值,从训练幕数来看,ε随着训练幕数增加不断减少;从单幕的步数来看,ε随者步数增加而增大。可用式(3)表示:
(3)
其中,ε0为贪婪系数的初始设定值,episode为幕数变量,step为每幕的步数变量。
2.2 εDBE方法和AεBS方法
针对Q学习中固有的探索-利用问题,该文提出随幕数(episodes)平滑衰减ε-值的ε-decreasing based episodes(εDBE)方法,以及根据Q表中的状态动作值判断到达状态的陌生/熟悉程度、做出探索或利用选择的adaptiveεbased state (AεBS)方法。
2.2.1εDBE方法
随幕数(episodes)平滑衰减ε值的εDBE方法结合了ε-decreasing方法和ε-贪婪方法的特点,即将初始ε设为一个较小的值,从训练幕数的角度来看,随着训练幕数增加而不断衰减;从单幕的步数角度来看ε保持不变,结合了ε-decreasing方法中ε衰减的特点,同时也具有ε-贪婪方法在每一幕步数中ε保持不变的特点。在选择同时满足上述两个特点的ε衰减函数上,采用式(4)控制ε值的衰减。
(4)
其中,ε0为贪婪系数的初始设定值,0<ε0≤1,episode为幕数变量。
将式(4)与式(1)结合可得式(5)。
2.2.2 AεBS方法
根据到达位置的陌生/熟悉程度和动作价值,从而做出探索/利用的动态动作选择AεBS方法。引入不断学习更新的Q表中动作价值作为陌生/熟悉程度的指标,当状态s下所对应的所有动作价值全为0时,认为该状态对于智能体来说是陌生的;当状态s下所对应的所有动作价值不全为0时,认为该状态对于智能体来说是熟悉的。在每幕学习的每一个步(step)中,遇到陌生的位置状态,ε值变为1,采取探索模式随机选择动作集中的任一动作;遇到熟悉的位置状态,ε值变为0,采取利用模式选择状态动作价值最大的动作。另外融合ε-first方法的思想,根据未知环境情况的不同,在幕数段中加入很小的ε值对Q表更新进行微调整。可用式(6)表示:
(6)
其中,episode为幕数变量,episo1和episo2为设定的幕数值,ε0为贪婪系数的初始设定值,0<ε0≤1,A(s)为状态s下的动作集合。
由于初始阶段中Q表的动作价值均初始化为零,因此采用AεBS方法的智能体可以充分探索环境,即每当遇到动作价值为零时智能体会判断出自身处于陌生环境,更倾向于随机选择不同的动作进行探索,更有可能不断遇到陌生情况,探索更为充分。同时在与环境的交互中不断更新Q表的动作价值,增加环境熟悉程度,从而利用Q表的动作价值的大小比较选择最优动作,进而不断更新路径策略。
3 引入εDBE方法和AεBS方法的Q学习路径规划
在未知环境路径规划下,移动智能体在不同的状态s下通过策略π选择要采取的动作a,与环境进行交互获得奖励r,并到达下一状态s'。重复上述过程不断迭代探索,更新Q表中的动作价值,找到更好的动作,直至找到最优策略π*,完成未知环境下的路径规划。时序差分方法是评估价值函数和寻找最优策略的实用方法。时序差分方法可以使智能体能直接与环境互动的经验中学习,不需要构建关于环境的动态特性。
Q学习是off-policy下的时序差分控制方法,是强化学习的一个重要突破[14]。Q学习更新的是动作价值函数,更新方法如式(7)所示:
Q(st,at)←Q(st,at)+α[rt+1+
γmaxaQ(st+1,a)-Q(st,at)]
(7)
其中,α为学习率,0<α<1;γ称为折扣因子,表示未来奖励对当前状态的影响程度[15],0≤γ≤1。
在t时刻智能体处于状态st,动作状态价值为Q(st,at),当智能体采取动作at后在t+1时刻到达状态st+1并获得奖励rt+1,此时智能体将在Q表中找到能够使在状态st+1下动作价值最大的动作a,以此来获得Q(st+1,a),从而对Q(st,at)进行更新。
可将式(7)改写成式(8)。
Q(st,at)←(1-α)Q(st,at)+
α[rt+1+γmaxaQ(st+1,a)]
(8)
假设st+1所对应的maxaQ(st+1,a)恒定,通过式(8)可迭代求得稳定的Q(st,at)。
一次迭代:
Q(st,at)←(1-α)Q(st,at)+
α[rt+1+γmaxaQ(st+1,a)]
(9)
二次迭代:
Q(st,at)←(1-α)[(1-α)Q(st,at)+
α[rt+1+γmaxaQ(st+1,a)]]+
α[rt+1+γmaxaQ(st+1,a)]
←(1-α)2Q(st,at)+
[1-(1-α)2][rt+1+γmaxaQ(st+1,a)]
(10)
以此类推,n次迭代:
Q(st,at)←(1-α)nQ(st,at)+
[1-(1-α)n][rt+1+γmaxaQ(st+1,a)]
(11)
因为0<α<1,所以0<1-α<1,当n→∞时,Q(st,at)将以概率1收敛到最优值,即:
Q(st,at)←rt+1+γmaxaQ(st+1,a)
(12)
当Q表更新后,根据式(13)即可选出状态下具有最大动作状态价值的动作,从而获得路径规划更优策略π'的更新。
π'(s)=argmaxaQ(s,a)
(13)
该文以稀疏奖励的形式定义奖励函数r,如式(14)所示,将状态分为障碍状态、路径状态和目标终点状态,分别用状态集合O(s)、P(s)、G(s)表示。其中到达障碍状态获得-1奖励值,到达目标终点状态获得+1奖励值,到达路径状态获得0奖励值,促使智能体避开障碍物快速到达目标终点。

(14)
每个状态有上、下、左、右四个动作可选择,训练的过程为输入当前状态后,根据(εDBE)方法或根据(AεBS)方法从Q表中选出当前状态的相应动作,与未知环境交互后获得奖励,进入下一状态并判断是否撞到障碍物。
若判定会撞到障碍物,则根据式(8)更新Q表后结束本幕学习,开始下一个幕的学习;若判定不会撞到障碍物,则根据式(8)更新Q表后进入下一状态,本幕学习直至到达终点或判定会发生碰撞障碍物后结束。重复学习过程,不断更新Q表中各个状态的动作价值,直至找到最优策略,实现路径规划。
4 实验结果及分析
4.1 实验设计
该文在10*10的地图上进行Q学习路径规划,设定了两种智能体未知的不同环境,对提出的基于探索-利用权衡优化的Q学习路径规划与基于经典的ε-贪婪方法、ε-first方法、ε-decreasing方法的Q学习路径规划进行比较,验证提出方法的可行性和高效快速性。
其中每个网格对应一个状态,用不同的状态标号表示[16]。即在位置(x,y)处的网格对应的状态标号stateno可用式(15)表示。
stateno=10(x-1)+y
(15)
图3所示为两种智能体未知的情况地图,状态SS为起点位置,GS为终点位置,起始位置和路径均用深灰色表示,黑色为障碍物。智能体在每个无障碍物的浅灰色位置状态下,有上、下、左、右四个动作可以选择,碰到障碍物意味着一幕学习以失败结束,获得-1奖励值,并返回起点位置;到达终点意味着一幕学习以成功结束,获得+1奖励值,并返回起点位置;到达其余状态均获得0奖励值。
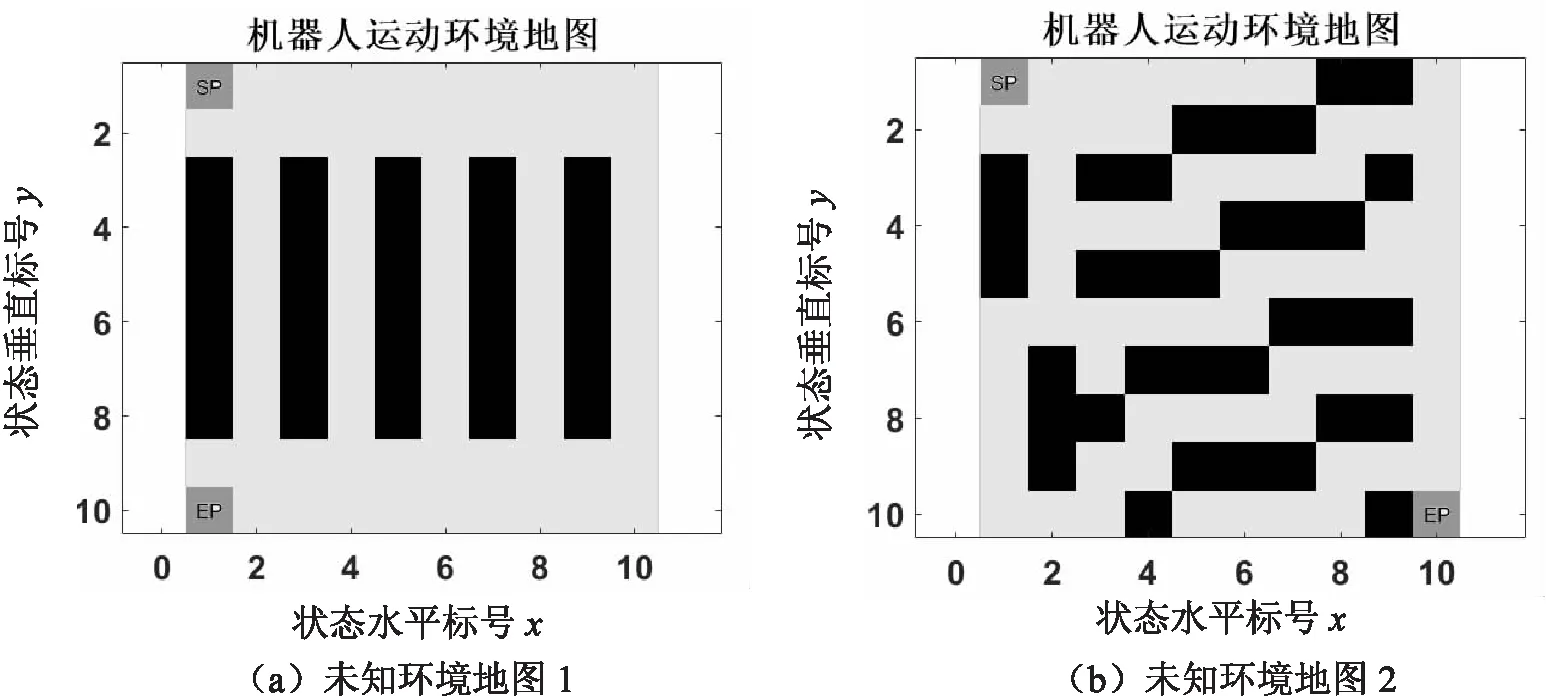
图3 两种智能体未知的环境地图
4.2 结果分析
通过Q学习路径规划可以得到以下仿真实验结果:图4所示为未知环境地图1下的仿真实验结果,其中折扣因子γ=0.8,学习率α=0.2,ε-贪婪方法的ε值为0.1,ε-decreasing方法的ε初始值为0.8,εDBE的ε初始值为0.2,AεBS方法在30幕前的ε值为0.05。从图4(b)可以发现,Q学习可以实现路径规划,找到从起点到终点的最优路径,状态转移步数为11步。

图4 未知环境地图1中的仿真实验结果
从图4(c)不同方法不同幕下ε变化比较中,ε-decreasing方法中ε衰减过程较为波动,εDBE方法中ε衰减过程较为平缓。
从图4(d)不同方法路径成功率比较中可以看到,提出的(εDBE)方法和(AεBS)方法都比经典的ε-贪婪方法、ε-first方法、ε-decreasing方法能更快找到最优路径,在相同的幕数经验学习下成功率更高。
从图4(e)不同方法路径步数收敛变化比较中也可以看出,(εDBE)方法和(AεBS)方法最优路径收敛更快,ε-贪婪方法大约在170幕左右收敛、ε-first方法大约在110幕左右收敛、ε-decreasing方法大约在100幕左右收敛,(εDBE)方法和(AεBS)方法大约在60幕左右收敛。
在图4(f)不同方法路径步数收敛后方法特性比较中,由于(εDBE)方法和ε-贪婪方法中ε-值不为零,会出现一些细小的探索“尖刺”,但这些额外探索并不会妨碍智能体根据Q表中动作价值函数找到最优路径。
为了检验不同未知复杂环境下基于探索-利用权衡优化的Q学习路径规划方法的适应性,在未知环境地图2下继续进行仿真实验,其中折扣因子γ=0.8,学习率α=0.2,ε-decreasing方法的ε初始值为0.8,εDBE的ε初始值为0.2,AεBS方法在100幕到300间的ε值为0.1。
图5所示为未知环境地图2下的仿真实验结果。实验结果表明,提出的(εDBE)方法和(AεBS)方法较ε-first方法、ε-decreasing方法,在Q学习路径规划中依然能更有效快速找到最优路径,状态转移步数为20步,最优路径收敛所需的学习幕数更少,找到路径的成功率更高。

图5 未知环境地图2中的仿真实验结果
5 结束语
针对移动智能体在未知环境下的路径规划问题,提出了基于探索-利用权衡优化的Q学习路径规划。实验结果表明,该方法具有可行性和高效性:提出方法能找到最优路径,实现路径规划;与现有的权衡探索-利用的ε-贪婪方法、ε-first方法、ε-decreasing方法比较,提出的(εDBE)方法和(AεBS)方法能更好权衡探索-利用问题,在未知障碍环境情况下具有快速学习适应的特性,最优路径步数收敛速度更快,能高效可行地解决未知环境下的路径规划问题。
猜你喜欢
建材发展导向(2022年2期)2022-03-08
作文通讯·高中版(2019年8期)2019-08-12
作文通讯·高中版(2019年8期)2019-08-12
VOGUE服饰与美容(2019年4期)2019-06-11
领导文萃(2019年8期)2019-04-19
领导决策信息(2018年16期)2018-09-27
读友·少年文学(清雅版)(2018年12期)2018-04-04
领导决策信息(2018年50期)2018-02-22
爆笑show(2015年3期)2015-05-08
中学生数理化·八年级物理人教版(2014年2期)2014-04-02