高斯滤波对规则斑点图像的亚像素匹配精度影响研究
2022-05-10 06:28范乃吉李银刚赵远情
中国测试 2022年4期
谈 杰, 范乃吉, 白 斌, 谭 宁, 李银刚, 赵远情
(中国工程物理研究院激光聚变研究中心,四川 绵阳 621900)
0 引 言
数字图像相关法(DIC)是一种快速、全场的非接触式测量方法,其基本过程是使用相机拍摄被测物体变形前后的状态,通过对变形前后的照片进行匹配计算,获得变形的数据[1]。相对于传统测量方法,DIC具有测量速度快、范围广、三维全场等诸多优点,但其最大的不足是测量精度较低,因此如何降低DIC的测量误差对于DIC的应用尤为关键[2]。
DIC的测量误差主要分为系统误差和随机误差[3],系统误差主要包括图像的亚像素匹配误差和图像搜索方法误差,随机误差包括图像噪声、光照强度影响等。在所有的误差中,亚像素的匹配误差是误差的主要形式,通过高阶的差值计算方法可以降低该误差,但会加大计算量。并且,随着阶数的提高,对降低误差的作用越来越小,而计算量呈指数增长,故一般最多采用三阶差值函数[4]。
本文以DIC亚像素差值误差为切入点,通过分析DIC测量原理以及亚像素匹配误差的影响因素,提出一种针对规则斑点图像的高斯滤波方法来提高图像的亚像素匹配精度。通过模拟恒定、线性、二次及三次位移场来研究该方法并确定最合适的滤波参数;然后将规则斑点图像与随机散斑图像进行对比分析,证明该方法仅限于规则斑点图像;最后验证了该方法的稳定性并应用到焊接图像匹配。
1 数字图像相关法
DIC是一种基于灰度特征的图像匹配方法,其核心是对变形前后的散斑图像进行相关性计算[5-6],图1是该方法的原理图。为了获得某一点O在变形后的位移量,需要在变形后的图像中寻找到该点的对应点,以该点O为中心,边长(2N+1)的正方形区域为计算子区,在变形后的图像中寻找和计算子区相关性最强的区域,该区域中心就认为是O点变形后的对应点。

图1 数字图像相关法原理图
图像匹配过程中,需要对子区内图像特征进行匹配[7],若子区内没有任何特征,如一张纯色的白纸,则无法进行图像匹配。图像特征可分为两类:天然特征和人造特征[8],如大理石自身的纹路就是天然的图像特征,而对于表面没有特征的,如金属件,则由人工喷涂特征到物体表面[9]。人工喷涂特征又可分为随机散斑特征和规则斑点特征,如图2所示。

图2 随机散斑特征和规则斑点特征对比图
2 高斯滤波对图像的亚像素匹配精度研究
高斯滤波是一种线性平滑滤波,适用于消除高斯噪声[10],广泛应用于图像处理的降噪过程,高斯滤波有两种实现方式:离散化窗口滑窗卷积和傅里叶变换,其中离散化窗口滑窗卷积目前最常见,只有当滑窗计算量特别大的情况下才会考虑傅里叶变换的实现方法[11-12]。在(x,y)的二维空间内,高斯滤波器的卷积矩阵G按照下式计算:

2.1 方案设计
图像匹配过程中,先进行整像素匹配,再进行亚像素匹配,想要衡量亚像素匹配误差的大小,需要知道图像亚像素位移的真值。通过对初始的高分辨图像施加位移场,然后对其进行抗混叠降采样,就获得了低分辨的亚像素位移图像,对高分辨率施加的位移场除以抗混叠降采样倍数就是亚像素位移。对变形前低分辨率图像和变形后低分辨率图像进行二维匹配,然后和施加的位移场进行比较,来判断亚像素匹配精度,具体过程如图3所示。

图3 图像处理流程
该试验所采用的图像为Matlab生成的5000×5000的像素矩阵,斑点直径为45像素,平均中心距为60像素,为了避免像素饱和,图像的像素范围由0~255调整到30~225,如图4所示。

图4 试验采用的图像
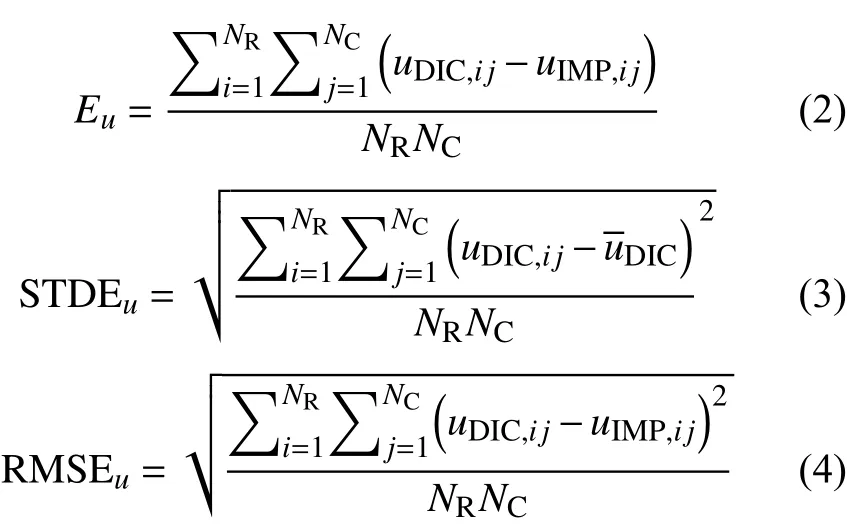
式中: uDIC,ij——每个网格的位移像素值;
i、j——当前网格点的位置;
uIMP,ij——每个网格点所施加的位移值,对于恒定位移场;
uIMP,ij——定值。
2.2 恒定位移场匹配误差分析
恒定位移场的亚像素匹配误差如图5所示,从图5(a)中可以看出,均值误差在0~1像素范围内呈正弦分布,当像素位移值为0,0.5和1像素时,为0,当像素位移值为0.3和0.7时,达到最大。对于同一位移值,当图像未滤波时,最大,当时,在0~1像素范围内基本为0。从图5(b)可以看出,标准差在0~1像素范围内沿像素位移值0.5对称分布,并且当像素位移值为0.5时,达到最大。并且可以看出,当图像进行高斯滤波处理后,其匹配标准差明显减小,当时,最大标准差为 0.0096 px,当时,最大标准差减小到 0.0021 px,降幅达到 78%。
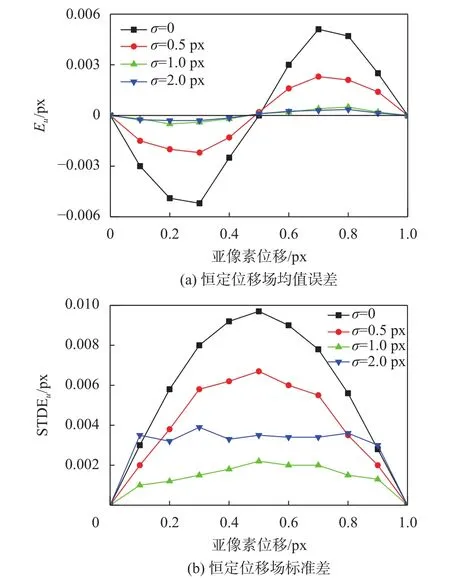
图5 恒定位移场匹配误差
2.3 高阶位移场匹配误差分析
图像的水平位移以及应变场通过式(5)~式(7)计算,线性位移及恒定应变场:

取 250~20000 µε,该范围覆盖了各种常用材料的极限应变水平,比如混凝土的极限拉伸应变约为µε,钢和铝的拉伸屈服应变约为µε,纤维聚合物复合材料的极限拉伸应变 约为µε。
1) 线性位移及恒定应变场

图6 线性位移场均方根误差
2) 二次及三次位移场
对于二次、三次或者更高阶的位移场,其应变场在水平方向上是像素位置x的函数,为了便于计算,引入函数 R MSEε(x),将水平应变测量不确定度表示为坐标x的函数,其计算公式如下式所示:
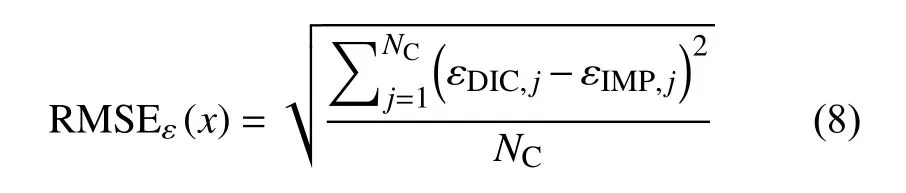
式(8)与 R MSEε计算公式相比,仅计算垂直方向(y向)行的应变不确定度, εDIC,j为横坐标为x,纵坐标为j的DIC测量应变,为横坐标为x,纵坐标为j的施加应变。

图7 二次位移场匹配误差

图8 三次位移场匹配误差
2.4 不规则散斑图像对比
为了对比分析,将散乱的散斑图像进行相同步骤的图像滤波并分析误差,这种散斑图像常见于在小型件上手工喷漆,如图9所示。为提高位移精度,采用频域方法对该图像进行亚像素位移,在水平方向上分别位移0.1,0.21.0 px,然后对位移后的图像以及原始图像用不同σ值的高斯滤波器处理。

图9 随机散斑图像
这种不规则散斑图像的匹配误差曲线如图10所示,从图10(a)可以看出,当图像未被滤波时,其均值误差在0~1亚像素范围内呈正弦分布,在整像素以及半像素位置,均值误差接近为零,适当的高斯滤波(σ=0.5~1 px)可以降低均值误差。但从图10(b)中可以看出,高斯滤波并不能降低标准差和均方根误差,甚至会使误差变大。所以,高斯滤波并不适用于这种不规则散斑图像。

图10 随机散斑图像匹配误差
2.5 焊接图像分析
以上所讨论的图像是数字生成的图像,而在工程实践中,所得到的图像都来自相机拍摄,对比而言,相机拍摄得到的照片会有畸变、噪声、光照不均等影响,比如在焊接变形测量过程中会有强光烟雾的干扰。图11为焊接DIC变形测量试验过程中所采集的照片,所用相机为Basler公司的acA1920-40 µm 工业相机,分辨率为 1920×1200,像元大小为 5.86 µm×5.86 µm。对该图片进行上述相同的分析过程,其中为避免对该图像进行亚像素插值,采用频域法对该图像进行整体平移,再对该图像进行匹配误差分析,结果如图12所示。

图11 焊接图像

图12 焊接图像的匹配误差
3 结束语
针对图像匹配过程中亚像素匹配误差大的问题,提出一种通过高斯滤波的方法来提高图像在亚像素匹配过程中的精度,通过分析,得到如下结论:
1) 对于恒定位移场,采用高斯滤波对规则斑点图像处理后可以有效降低亚像素匹配误差,并且在高斯滤波器标准差左右时误差降低到最低。
2) 对于一阶或高阶位移场,高斯滤波依旧可以降低规则斑点图像的亚像素匹配误差,当标准差时 误差降低到最低,但随着应变增大,高斯滤波对降低图像亚像素匹配误差的效果有所减弱。
3) 高斯滤波方法可以提高图像亚像素的匹配精度,并采用焊接图像验证了方法的有效性。
猜你喜欢
大学物理实验(2022年2期)2022-10-20
新作文·小学低年级版(2022年3期)2022-08-30
微型电脑应用(2022年3期)2022-04-20
智慧少年·故事叮当(2021年5期)2021-08-23
计算机与数字工程(2020年7期)2020-10-09
计算机与网络(2020年7期)2020-05-15
今日农业(2019年15期)2019-01-03
雷达学报(2017年3期)2018-01-19
电脑知识与技术(2016年17期)2016-07-23
现代电子技术(2015年11期)2015-07-28