基于超声传播时间的水位精测技术
2022-05-10 06:29胡鹤鸣谢代梁
中国测试 2022年4期
王 旺, 刘 源, 胡鹤鸣, 谢代梁
(1. 中国计量大学计量测试工程学院,浙江 杭州 310018; 2. 中国计量科学研究院,北京 100029)
0 引 言
水位是水面到参考位置的高度,是容积换算、流量测量中的重要量值之一,广泛应用于储罐容积换算、水工模型试验等领域[1]。当参考位置为水体底面时又被称为水深。
水位和水深的测量范围依使用场景,测量范围及精度需求具有一定差异。水工模型试验指的是水工建筑物的缩尺模型,水位变化范围通常不超过0.5 m,对准确度的需求约为 0.1 mm[2]。此外,水位也是金属量器和工业储罐的关键测量参数,JJG 259—2005要求标准金属量器的液位管读数分辨力应优于 0.1 mm[3];对于大型储罐,JJF 1698—2018中要求最大液位允许误差为±1 mm[4]。水位和水深测量多常用于贸易交接,其测量的准确程度受到人们的重视。
根据测量原理不同,水位测量仪器主要有浮子式、磁致伸缩式、压力式、雷达式、超声式等技术形式[5]。浮子式水位计利用浮球和悬索带动编码器来测量水位,一般分辨力不超过1 mm;磁致伸缩式水位计也利用浮子表征液面位置,其测量的是超声波沿波导管传播至浮子内磁性线圈的时间[6],可实现0.1 mm的分辨力。这两种水位计都依赖于浮球及其牵引悬索或波导管,使用场景具有一定的局限性。压力式、雷达式、超声式等三种水位计则直接测量水下压力或液面回波,无需浮子等可移动部件,具有一定灵活性,但常规产品较难突破1 mm的测量准确度。
超声传播时间法是一种应用广泛的水位测量方法,根据传播介质分为气介式和液介式。气介式的探头安装在水面上方,由于超声在气体中传播的速度较慢,声速梯度对测量结果的影响更为显著。李弘设计了一套气介式超声液位测量装置,在2.5 m量程内测量相对误差为1.2%[7]。液介式的探头安装于水下,其基本原理与气介式相同,但是由于水中声速远高于气体,并且水中声速梯度和相对变化也更小,液介式超声水位测量的精度理论上高于气介式。廖雁鸿设计了一套基于液介式超声液位测量装置,通过回波校正及温度补偿修正等手段,在1.5 m量程内其相对误差小于0.5%[8]。
在静置水体的超声水位测量现场中,根据超声传播时间法水位测量的基本原理,影响液介式超声波水位测量精度主要因素包括超声传播时间的算法[9](波形算法的选择直接影响时间信号采集精度)、具有现场针对性的测量结构设计方案[10]、声速的准确度及其校准方法[11]、水体温度分层(温度分层直接影响着超声在水体中传播声速的均匀性)。在自然水体中,水体静止引起的垂向温度分层现象,会造成声速梯度。垂向温度分层规律跟季节、环境温度变化、水体深度、静止时间等因素有关[12]。因此,温度分层现象引起的声速梯度对于超声应用于储罐等静置水体精确测量来说一直是个难点问题。
本文基于液介式超声传播时间测量理论,针对储罐等容积换算需求,对水位精密测量方法进行了研究,研制了一套超声水位测量装置。首先从超声传播时间算法优选、装置结构设计、实时声速精确测量等方面展开研究;其次,对声速梯度、装置波束倾角等典型现场因素的影响量级进行了分析。并采用了高精度水位测试平台对超声水位测量装置的测量能力进行了测试。
1 液介超声水位测量原理及装置
1.1 测量原理
液介式超声水位测量原理如图1所示,超声换能器在介质底部发射超声波,超声波在水中传播至气液分界面(声阻抗不同)时发生反射,返回底部后被同一个超声换能器收到[13];通过计算超声波从换能器发射到接收信号的时间以及超声波在介质传播过程中的声速,可计算出超声水位H。实际上,在水位测量应用中,视水温度均匀性情况,理论上可布置多个声速测量点以提高超声水位测量的精度。

图1 超声水位测量原理
由超声水位测量原理可知,声速测量精度影响着水位测量的准确性。为了提高声速测量的准确性,采用了基于超声时差法的声速测量原理。超声时差法声速测量原理如图2所示,超声换能器经反射层反射生成和捕捉两次回波,记单次捕捉回波的时间为t1,两次捕捉回波的总时间为t2。根据时差法原理公式可计算出声速c。
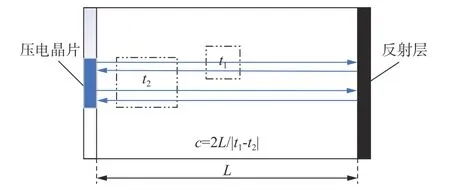
图2 超声时差法声速测量原理
压电晶片是超声换能器的核心部件,频率是其重要指标,需要根据声波衰减和测量分辨力两个因素进行选择[14]。压电晶片频率越高,水位测量分辨力也越高,但超声衰减系数和压电晶片频率的平方成正比。压电晶片频率越高,超声波衰减会越大[15-16]。综合考虑,选择1 MHz压电晶片来封装探头。
1.2 波形算法
常用的波形算法包括阈值法、相位法等。阈值法的核心是获取回波特征点,进而去计算声波的往返时间。但阈值法存在一定的局限性,介质液面波动、距离等因素都会使得信号幅值发生变化。这会对回波特征点的取值造成误判,进而会出现丢失周期的现象。
为了使得超声水位测量装置能够适用于高精度的水位测量场景,水位测量装置时间信号处理算法采用了Hilbert传播时间算法,其算法原理如图3所示。该波形算法原理如下:将时域信号y(t)通过Hilbert变换得到yH(t),然后将每个周期的时间信号转化成相位信号。每个周期的时间信号的峰值等于其相位直线的过零点。根据简谐波的假设,每个周期的相位近似一条直线,拟合的相位直线的过零点代表了相位为零的时刻。通过系统修正,即可得到超声传播时间t。
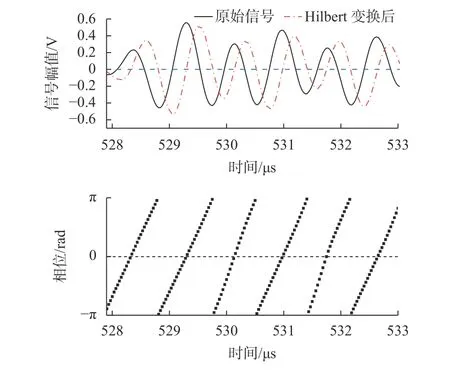
图3 Hilbert传播时间算法原理
1.3 水位测量装置
超声水位测量装置由超声水位测杆、声速探头以及多声道超声数据主机组成,装置实物如图4所示。

图4 超声水位测量装置实物
1)测杆主体结构
超声水位测杆由超声水位探头、底托、延长探杆、通信接口组成,如图5所示。通过BNC接头与多声道超声主机建立通信,以测量超声波信号。探杆长度可根据实际液位测量需求更换。超声探头安装于底托上方。已知底托的厚度,可作为测量水深时的零点修正。

图5 测杆主体机构
2)多声道超声数据主机
多声道超声数据主机主要由显示屏、通信接口、1 MHz采集板卡组成。多声道超声数据主机用于处理超声水位测杆和声速探头所获取的时间信号,计算后可得到水位数值。主机数据采样率可设置在 1 ~5 Hz之间;时间测量算法为 Hilbert算法。
测杆上端安装有手持结构,方便操作人员调解位置。通过手持结构顶部的气泡水平仪,能够通过调节竖直度的方式,降低测量时的波束倾角。从而降低装置在测试安装时由探头与水面夹角导致的比例偏差。
4)声速补偿
超声水位测量采用声速探头实测声速的方法进行补偿。声速探头测量原理为超声时差法。声速探头实物如图6所示,声速探头主要采用超声换能器加不锈钢反射板的结构设计。采用不锈钢结构优点在于声波可以在不锈钢反射板之间反射两次,利用两次传播时间差以此来抵消电路延时等问题,进而使得两次反射过程中的时间差代表声速在水中的传播时间(不经过其他介质)。其测量所用超声换能器频率为1 MHz,保护层材料为不锈钢。

图6 声速探头实物
2 测试平台及校准方法
2.1 声速校准
为了对超声时差法声速探头的声速测量精度进行分析,根据声速~温度在纯水中的经验公式,如公式(1)所示[17]。利用了高精度铂电阻温度计对超声时差法声速探头在恒温槽中进行了测试。

其中 T 指温度,单位为℃;A=1402.39;B=1478.5625;C=0.6949454; D=0.16618854; E= – 0.0160586; F=0.02192692。
测试所用装置为高精度铂电阻温度计和恒温槽,高精度铂电阻温度计安装有两个铂电阻测温模块。其仪器宣称测量准确度可达0.1 mK。经过声速~温度经验公式转化后,铂电阻温度计的声速测量准确度能达到0.5 mm/s。恒温槽能够精密地调节温度,稳定后恒温条件下的温度波动性小于2 mK。测试时将恒温槽调节至几个不同温度点,利用声速~温度公式获取不同温度点下的标准声速,与声速探头在纯水中所测得的实时声速进行对比分析。
2.2 水位测试平台
液介式超声水位测量装置利用高精度水位测试平台进行测试分析。水位测试平台全程位移累积误差小于30 µm,且底部作为标准器的激光干涉仪测量准确度为 0.5 µm。水位测试平台能够在 1000 mm以内实现对液位测量装置任意步长的自动化测试实验。下方放置 400 mm 直径、1000 mm 深的圆柱形实验室测试水箱。测试时将水位测量装置与导轨的调节机构连接,可使装置部分在测试水箱中上下竖直移动来模拟水位,其水位测试平台如图7所示。
超声水位测量装置固定在水位测试平台,装置通过伺服平台在测试水箱中运动时,需要对装置连接杆在水中运动时引起的水面上升高度进行修正。其修正系数α如公式(2)所示。

式中:d——连接杆外径;
此外,本文研究及结论也对我国小微企业信贷实践提供了一些现实启示。首先,银行在小微企业信贷业务流程中,需提高对信任可能产生影响的重视程度,在信贷决策机制中将信任纳入考虑,并注重对小微企业提供多元化的金融服务,以加深银企关系,促进信任的长期良性发展。其次,小微企业在开发和维护银企信贷关系过程中,可从如下三个方面入手提高银行信任程度:一是提升自身经营实力,增强银行对企业的能力信任;二是注重自身诚信、声誉的建立和维护,以增强银行对企业的诚实和善意信任;三是重视信用维护,在长期银企信贷交互过程中,促使银企关系逐步深化,这将有助于提升贷款可获得性。
D——测试水箱内径。
水位测试平台在水位测量装置性能测试中起到模拟水位的作用,通过软件设定的距离去控制伺服平台的运动行程。与此同时更主要的是可以为装置水位测量能力分析实验分别提供脉冲步长和激光干涉仪作为参照标准,将水位量值溯源到长度。以便于更好的去分析超声装置的水位测量能力。
3 测试结果及分析
3.1 声速测量结果
声速探头利用高精度铂电阻温度计和恒温槽在6个不同的温度点进行了测试,恒温槽的空间温度均匀性在–0.001 ~0.001 ℃以内。如图8所示,6个不同的温度点声速探头实测的声速基本上与声速~温度经验公式曲线一致,拟合程度较好。表1是6个测试点的标准声速和声速探头实测数据,在12.6 ~19.8 ℃左右变化的温度范围内,基于时差法原理设计的声速探头测量相对误差小于0.005%。其声速测量精度能够满足目前超声水位测量需求。

表1 声速测量结果的相对误差

图8 声速测量结果
3.2 影响因素分析
3.2.1 静置水中的声速梯度
在储罐等水位测量中,由于水体大部分时间处于静置或稳定状态,自然形成的温度分层导致声速形成梯度,从而使超声波传播过程中的速度并非匀速,进而影响超声传播时间的测量结果。其中影响其温度分层的主要因素有季节变化、水深等。赵林林等人通过观测其平稳表面湖水的温度分布发现,2.5 m 深处的湖水可产生 1 ~4 ℃ 的温度分层,主要受到气温、风速和表面漂浮物等影响,并随昼夜和季节变化[12]。因此由温度分层所引起的声速梯度是超声在储罐容器等进行水位测量时的主要误差来源之一。在实验室条件下,量化了测试水箱处于静水状态下的声速梯度。
超声水位测量装置固定在水位测试平台上,并将声速探头固定在水位测量装置上。利用测试平台缓慢带动水位测量装置分别运动至测试水箱不同深度。在尽量不改变原有温度分布的前提下,利用声速探头观察水位测量装置测量声径不同深度的声速分布,通过声速~温度经验公式可得装置测量声径附近不同深度的温度分布情况。
如图9所示,可以看出:测试水箱内水位测量装置测量声径附近上、中、下层声速差异明显,表明了测试水箱出现了温度分层的现象;静水中不同位置声速的最大差异为2.5 m/s左右,对应温度变化约为0.7 ℃左右。采用逐段对超声传播时间和声速进行积分,与传播时间和平均声速的乘积对比,声速梯度对水位测量结果的影响最大可达2 mm。

图9 测试水箱声速梯度
因此,对于静水水位而言,声速梯度是其主要测量误差来源。当温度分层引起的声速梯度对测量结果的影响超过允许值时,可采用多点声速测量方法对其进行补偿。
3.2.2 波束倾角
对于超声水位测量而言,装置安装的倾斜度引起的波束倾角变化是超声传播时间法的测量误差来源之一。为了量化水位测量装置波束倾角对于测量精度影响程度,实验利用了水位测试平台,主要分析了5个不同的角度:左偏记为负,右偏记为正。通过装置顶部内置的气泡水平仪来确定装置在水位测试平台上的波束倾角,并在不同的角度下移动固定的步长以及等待特定的时间,得到不同波束倾角下的水位数据。
每个角度下进行3次实验,通过结果发现,波束倾角会使装置水位测量结果存在测量误差,即随深度单调线性增加的测量误差。用测量误差随水位增加的增长率来量化描述波束倾角对于超声水位测量结果影响。–1°~1°范围内波束倾角引起的测量误差曲线如图10所示。可以看出,超声传播时间法测量结果与波束倾角有关,在波束倾角较小时其测量误差可以忽略不计,波束倾角在–1°~1°变化范围内引起的水位测量误差小于0.01%。

图10 不同角度测量误差
3.3 水位测试结果
为了达到良好的测试效果,降低声速梯度对于超声水位测量精度的影响,采用了多个声速探头在测试水箱不同深度进行测量的方案。利用多个声速测量点的数据对声路上的时间和声速进行积分以降低此影响。并通过手持结构上的气泡水平仪将波束倾角控制在–1°~1°以内。
通过测试平台带动水位测量装置做竖直运动,以模拟水位的改变量。从测量结果的示值误差、重复性以及最小的分辨能力等角度对水位测量装置的性能进行评价。其测试示意如图11所示。

图11 测试示意图
1)准确度测试
激光干涉仪作为参照标准,在50 ~850 mm测量范围内,将水位测量装置固定于导轨并以10 mm/s的速度做步长为20 mm的分段运动,每个测量段等待时间40 s以测量平均水位,采样频率设置为1 Hz。图12给出了部分其激光干涉仪计算出的标准水位及超声测得水位的时间-水位测试过程曲线。

图12 水位测试过程
图13和表2分别给出了超声水位测量装置在水位测试平台上实验室测量范围时的累积示值误差曲线及部分超声水位测值和干涉仪标准水位数据,误差棒指五次测量重复性标准差。数据显示,装置水位测量重复性达到0.01%,利用多个声速探头进行积分换算以降低在水位测量装置在测试水箱中测量声径的声速梯度后,装置在测量50 ~850 mm范围的水位时,其累积示值误差在–0.1 ~0.1 mm以内(见表2数据)。

图13 水位测量示值误差

表2 部分水位测试数据
2)分辨力测试
为了研究超声水位测量装置的分辨力,在静水、温度稳定的严格测试条件下,利用了恒温槽(能均匀地控制水体温度波动性小于2 mK),在水位58.5 ~68.5 mm 范围内以步长 0.2 mm 做分段测试,观察水位分辨能力。图14为分辨力测试结果,可以看出,水位测量装置最好能达到约1 µm的分辨力,满足使用需求。
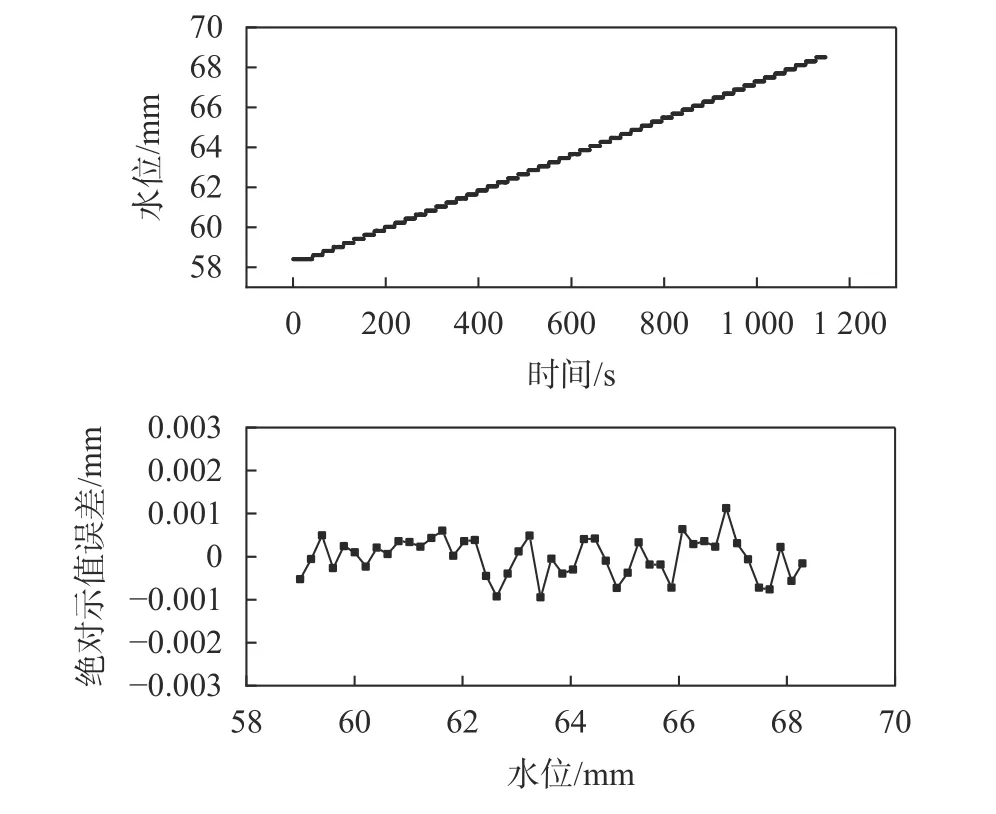
图14 分辨力测试结果
4 结束语
针对储罐等容积换算场景,对精密超声水位测量方法进行了研究,研制了一套液介式超声水位测量装置,并在实验室条件下对液介式超声水位测量装置的测量能力和现场测量中的典型影响因素进行了分析。主要结论如下:
1)在实验室的测量范围内,超声水位测量结果的重复性达到0.01%,水位测量误差小于0.1 mm,分辨力可达 1 µm。
2)声速梯度是静置水体中超声水位测量误差的重要来源之一。设计了高精度声速补偿装置,声速测量相对误差小于0.005%,并在分析了声速梯度对水位测量影响量级的基础上,提出了梯度声速修正方法。
3)波束倾角是现场测量的误差来源之一。小角度的波束倾角对测量结果准确性的影响可以忽略,波束倾角在–1°~1°变化范围内引起的水位测量误差小于0.01%。
猜你喜欢
信息通信技术(2022年2期)2022-05-31
导弹与航天运载技术(2022年2期)2022-05-09
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
成都信息工程大学学报(2021年6期)2021-02-12
科学大众·小诺贝尔(2021年10期)2021-01-22
数字海洋与水下攻防(2020年6期)2020-12-25
舰船科学技术(2020年3期)2020-04-22
舰船电子工程(2018年11期)2018-11-26
中学生数理化·八年级物理人教版(2017年2期)2017-03-25