激光点云固体火箭发动机内腔容积测量方法研究
2022-05-10 06:29刘静静宁泓淘孙煜雅
中国测试 2022年4期
刘静静, 金 永, 宁泓淘, 范 晨, 孙煜雅
(中北大学信息与通信工程学院,山西 太原 030051)
0 引 言
作为固体火箭发动机存储和燃烧推进剂的燃烧室,其内腔体积直接决定着装药量,从而影响着固体火箭发动机的发射性能[1]。固体火箭发动机腔体属于大长径比管类构件,从目前的管类构件容积测量方法来看,主要有称水法、音频检测法、环形结构光法[2]、超声波法。
传统的 “称水法”原理简单、精度高,但可操作性差、效率低,需要对内腔进行后期烘干处理。郑浩[3]等提出了可以快速实现弹体药室容积检测的音频检测方法,但该方法对其硬件及信号处理系统要求较高、技术难度大。此外,利用内耗与药室内腔容积的数学模型计算出的容积误差较大。冯忠伟[4]等提出了一种基于环形结构光的药室内腔容积测量技术,该测量装置可一次性完成全部内腔参数的测量任务,效率较高,但其系统结构复杂,调整难度大,误差源多,其测量精度与采样点个数有关。韩跃平[5]等提出了一种基于超声波的非接触式药室内腔容积测量法,但在没有图纸等参数的情况下,还需额外的外形尺寸检测方法,对于不同型号的药室还需要重新计算。
近年来,三维激光点云的应用为计算腔体容积提供了新思路,董立宙[6]提出了基于激光点云的固体火箭发动机内腔容积测量方法。通过对点云数据进行切片、投影等操作实现发动机内腔快速、非接触式测量。但内腔容积的计算结果直接受有效像素个数和八叉树迭代次数取值等因素的影响,导致测量结果不稳定,容积测量精度不高。
Delaunay三角剖分法构网速度快,效率高,实用性强,在对平面点集构建三角网格时,可以按照多种方式生成单元质量饱和且唯一的三角网格,能够达到在约束性表面分析时对网格单元质量的要求的同时,提高容积计算精度。因此,为实现固体火箭发动机内腔容积的准确测量,该文在点云切片的基础上,采用基于凹包分割的Delaunay三角剖分法计算腔体容积。
1 检测方法原理
1.1 点云切片
点云是空间散乱点的集合,代表了物体表面轮廓特征信息,点云切片的本质是一组平面与点云的相交。即存在一个平面,点云数据集,求出在平面中的轮廓线。由于点云密度是有限的,利用在平面中的点求出轮廓线是不可行的,所以引入“切片宽度”。沿着特定方向,按照给定的切片宽度在最小值与最大值之间对点云数据进行剖切,得到一系列点云切片。
1.1.1 切片方向的确定
切片方向不同,得到的切平面曲线也不同。首先对点云的特征进行分析,选择合适的切片方向。具体可以用以下两种方法来确定切片方向:1) 已知一个平面,那切片平面应平行该平面;2) 用一组间隔一定距离且垂直于坐标轴的平面作为切片面组。图1为点云切片示意图。

图1 点云切片示意图
1.1.2 确定切片宽度
切片宽度是自定义参数[7],对切片算法执行时间和切片精度会产生一定的影响。设有点云数据集为,则此点云数据集坐标范围沿自定义切片方向,按照给定的切片宽度在最小值与最大值之间对点云数据进行剖切,依次得到系列水平点云切片。
目前常用的切片宽度计算方法为密度法,见下式,通过下式计算得到点云的密度,进而确定切片的宽度。

根据下式求解切片宽度:

其中β为一般取值4~8。
1.2 点云切片面积的计算
固体火箭发动机在加工过程中,由于受到轧制工艺、生产设备等因素的影响,导致腔体内部并非都是平滑的,内腔表面存在“凹坑”缺陷,因此,点云切片后投影轮廓图存在凹包。为准确测量点云切片的面积,该文了提出了基于凹包分割的Delaunay三角剖分法。
选择XOY平面为投影面进行投影得到投影轮廓线,并按照顺时针方向对轮廓线上的点进行重新排序。根据Delaunay三角剖分算法[8]准则,Delaunay三角剖分在平面点集中会生成凸多边形的外壳,当数据中存在凹包时,会在凹包外生成三角网,这将导致点云切片的面积偏大,因此该文选择对凹包进行分割,先搜寻边界凹点,并确定最深凹点,将点云切片分成若干部分,并对每一部分进行Delaunay三角剖分,计算出点云切片的面积。
1.2.1 搜寻边界凹点
该文利用边界点与前继点、后继点的旋转角信息搜寻凹点。在轮廓线上任选一点作为初始点(下标i为该点的索引值),选择点、作为该初始点的前继点和后继点[9](下标 i−d 、i+d 分别为点的索引值),计算向量的坐标。该三点之间的位置关系如图2所示。根据向量的向量积(叉积)的正负判断该边界点是否为凹点。由向量积右手定则可知,若向量的叉积为正,则。若叉积为负,则同时由向量旋转角定义可知,若在逆时针方向,向量的旋转角(即叉积为负),则该边界点为凹点,否则该边界点为非凹点。按照顺时针方向依次遍历轮廓线上的点直到(K为投影点数),可获得凹点,保存凹点信息。根据凹点信息,计算凹点与前继点、后继点形成的向量的旋转角,从每一凹包的凹点中选择凹陷程度最大的点,即旋转角最大的点作为该凹点群的最深凹点。

图2 前继点和后继点的示意图
1.2.2 点云切片分割
凹点集合中的点都位于某一特定直线的两侧,根据这一规律得出凹点方向分类的标准[10]。假设最深凹点集合中任一点的坐标为,并且特定直线的方程为,将任一点坐标的代入方程中求得,通过比较、的大小,按照两个不同的方向将凹点分开,并分别存放在两个数组中,同时按照顺时针和逆时针方向分别对两个数组中的凹点进行排序,从长度大的凹点数组中第一个凹点开始与另一数组中凹点进行匹配可得到分割点对。对于凹点数组中剩下不能匹配的凹点,寻求其与边界点的连线。

图3 点云切片分割示意图
1.2.3 点云切片面积计算
该文以点云切片分割后的某一部分为例,介绍基于Delaunay三角剖分的点云切片面积计算方法。具体步骤如下:
2)利用Delaunay三角网算法构建三角网,并保存每个三角形的顶点的索引值到矩阵tri[m,3](m是三角形的个数)。
3)提取矩阵tri[m,3]的第一行(即第一个三角形的顶点的索引值),可得到三角形三个顶点坐标,由下式所示的三角形面积计算公式可求出该三角形的面积。

4)重复步骤3),直到矩阵最后一行,所有三角形面积计算并保存完毕,累加所有三角形的面积如下式所示,得到分割后点云切片的面积。

5)重复以上步骤,计算出整个点云切片的面积。
1.3 发动机内腔容积计算
每两层切片之间的一段内腔作为一部分,该部分的容积可由公式(5)计算求得(即点云切片面积与切片宽度之积),利用公式(6)计算整个燃烧室内腔的容积。
2 实验及结果分析
2.1 实验
该文以某型号固体火箭发动机为研究对象,如图4为数据采集装置示意图(其中长短测臂用于不同口径的直筒段和前封头段的测量),采用激光位移传感器[11]采集固体火箭发动机内腔点云数据(包括 38332299个点),并对其进行配准、去噪、精简等[12-15]处理。图5(a)为壳体中部,图5(b)为前后封头。沿着垂直于Z轴的方向,按照0.65 mm的切片宽度从上到下切割点云。
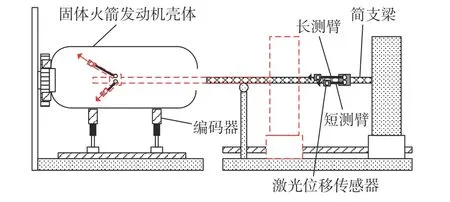
图4 数据采集装置示意图

图5 点云数据
图6是Delaunay三角剖分在凹包处生成的三角网效果图,从图6中可以看出,Delaunay三角剖分会在凹包外生成三角网,导致计算的点云切片的面积偏大,最终使得固体火箭发动机内腔容积精度不高。 图7点云切片分割后进行Delaunay三角剖分后的效果图,可以看出:在凹包处完成分割之后不再生成多余的三角形,提高了点云切片面积的计算精度。

图6 凹包处生成的三角网效果图

图7 凹包分割后生成三角网效果图
2.2 结果分析
为验证提出的算法准确性,选择传统的的“称水法”测得的固体火箭发动机内腔容积测量值为理论值,即理论值为 663504368 mm3。将该文算法称为方法1,文献[9]提出的算法称为方法2。分别采用以上两种方法计算固体火箭发动机内腔容积,其结果如表1所示。

表1 不同容积测量方法结果对比
从表1可以看出,以上两种方法均能实现固体火箭发动机内腔容积的计算,由于该文数据量较大,点云切片宽度仅不到1 mm, 因此所需时间较长。相比而言,该文提出的方法运行时间更长,但计算的结果相对误差更小,精确度更高。因此该文方法是一种更为精确的腔体容积测量方法。
3 结束语
该文在点云切片的基础上,提出了基于凹包分割的Delaunay三角剖分容积测量方法,实现了对固体火箭发动机内腔容积的非接触、全方位、高精度容积测量。此外,Delaunay三角剖分算法具有更好的稳定性,不易受点云密度的影响。
该文方法不仅适用于固体火箭发动机内腔容积测量,对输气管道、密闭容器等大长径比管类构件的测量也具有普遍适用性。
猜你喜欢
中国临床医学影像杂志(2022年6期)2022-07-26
小学生学习指导(高年级)(2022年4期)2022-04-26
理化检验(物理分册)(2021年3期)2021-03-23
中华养生保健(2020年3期)2020-11-16
兵器装备工程学报(2020年9期)2020-10-12
南京大学学报(数学半年刊)(2020年1期)2020-03-19
汽车维护与修理(2019年14期)2019-08-08
科技创新与应用(2019年8期)2019-06-27
中国建筑金属结构(2019年4期)2019-05-15
无线互联科技(2017年12期)2017-07-18