
基于智能数据融合的车内噪声主动控制算法*
2022-05-21 13:04刘宁宁孙跃东王岩松孙裴郭辉
汽车技术 2022年5期
刘宁宁 孙跃东 王岩松 孙裴 郭辉
(1.上海理工大学,上海 200093;2.上海工程技术大学,上海 201620)
主题词:车内噪声 噪声主动控制 智能数据融合 参考信号
1 前言
传统的被动控制技术对车内中高频(≥500 Hz)噪声控制十分有效,但无法控制低频噪声。主动噪声控制(Active Noise Control,ANC)基于信号的相消干涉原理实现,十分适合控制低频噪声,已被很多车型采用。ANC 系统根据是否有参考信号可分为前馈系统和反馈系统。常用的ANC 前馈系统利用一个参考传感器接收初级噪声源的信号,信号经噪声主动控制器滤波后,由扬声器发出振幅相同、相位相反的次级声源来降低初级噪声,再利用误差传感器接收残余噪声信号,传递至控制器的滤波器进行自适应调整,从而保证误差传感器的区域噪声降至最低。
ANC 系统不仅可降低车内噪声,还可改变噪声频谱,完善车内声品质。目前ANC 的研究主要集中在新型控制算法的开发和算法性能优化上,使算法收敛速度、计算复杂度和均方误差间的匹配达到最优。在ANC系统中,时域最小均方(Least Mean Square,LMS)算法及其改进算法应用最为广泛,如变步长LMS(Variable Step-Size LMS,VSS-LMS)算法、滤波-x LMS(Filter-x LMS,FxLMS)算法、变步长FxLMS(Variable Step-Size FxLMS,VSS-FxLMS)算法等。这些改进算法在平稳和非平稳噪声的处理中具有简单、鲁棒和有效的特点,能够自适应地跟踪环境的变化,但均建立在准确提供参考信号的基础上。参考信号作为主动控制算法的重要输入之一,直接影响算法的控制效果。汽车ANC 系统中传统的参考信号获取方法是在乘员耳侧安装传声器,此方法不可避免地引入了次级声源的二次污染,不利于系统的快速收敛。车辆怠速或低速行驶时车内噪声源主要为发动机,ANC 系统多以发动机转速作为参考信号;车辆中速行驶时车内噪声源主要来自轮胎与路面的激励即路噪,针对路噪,ANC系统多以副车架或悬架系统上的振动信号作为参考信号。但随着车速的提高,车内噪声源中风激励即风噪的比例逐渐增大,针对风噪,ANC系统参考信号目前还没有较好的实现方案。
本文采集车辆在不同工况下的车内外噪声、振动、发动机转速等信号,根据前期研究基础判断不同工况下与驾驶员耳侧噪声相关性大的测点信号,然后根据发动机转速信号和车外测点信号进行数据融合作为参考信号,再利用IVS-FxLMS 算法对驾驶员耳侧噪声进行主动控制。
2 IVS-FxLMS算法


图1 FxLMS算法框图
FxLMS 算法以()的最小均方为准则,依据最速下降法的原理进行迭代。控制器的输出信号为:

式中,()=((1),(2),…,())为滤波器的系数向量;为其长度;()=((),(-1),…,(1))为对应的参考信号。
控制器的输出信号()传递至误差传感器处时,有:

式中,*表示线性卷积运算;()为()的单位脉冲响应。误差信号()可表示为:

控制器的输入信号即滤波参考信号()为:

自适应更新滤波器()的系数为:

式中,为步长因子,使得滤波器系数向目标函数的梯度反方向更新迭代一步。
的选择会影响算法的收敛速度和最小均方误差,其收敛范围为:

式中,为滤波器输入信号向量()自相关矩阵的最大特征值。
在主动控制算法中,步长参数选取越大,算法收敛速度越快,但是相应的算法稳态误差也会增大,如果选用较小的步长参数,算法稳态误差得以减小,但算法收敛速度会相应变慢。针对这一问题,研究人员提出了许多变步长ANC算法和思想。由于车内噪声环境具有时变复杂性,ANC 算法容易受噪声影响。为了弥补这一不足,文献[16]建立了步长参数与迭代次数间的非线性函数,设计了迭代变步长FxLMS(Iterative Variable Step-size FxLMS,IVS-FxLMS)算法。算法中的步长参数随迭代次数的增大而逐渐减小,从而避免噪声等因素的影响。步长参数()与迭代次数的函数式为:
式中,、分别为根据算法收敛条件设置的步长参数最小、最大值;为根据控制结果的不同需要设置的调整参数,控制步长参数随迭代次数变化的快慢程度。
假设=0.05,=0.9,分别取10、50 和100 时,()与的函数曲线如图2所示。从图2中可以看出,步长参数随迭代次数单调递减,决定曲线递减的速度,、需要通过试验确定最优值。

图2 迭代变步长参数变化曲线
综上,IVS-FxLMS自适应滤波器权系数迭代公式为:

3 基于智能数据融合的主动控制算法
智能数据融合是基于现代计算机技术,通过将布置在不同位置的不同类型的传感器信号和信息源数据加以组合分析,发挥组合优势,对所需对象做出准确估计的复杂处理过程。本文将发动机转速信号、振动信号和麦克风噪声信号进行融合作为参考信号。
如图3 所示为基于智能数据融合的主动控制FxLMS算法框图,首先根据传递路径分析(Transfer Path Analysis,TPA)结果从众多传感器中选出与车内乘员耳侧噪声相关性大的信号,(),(),…、(),(),…表示信号传递至乘员耳侧路径的单位脉冲响应,则参考信号可表示为:

图3 基于智能数据融合的FxLMS算法框图

式中,,,…为信号幅值调节系数。
每个幅值调节系数的值需要根据试验获得,选取的每个参考信号对应目标点噪声信号的不同频段,根据该频段降噪的效果调节幅值大小,直至获得最优的控制效果。
TPA通过对机械系统中的能量传递路径分析来确定各路径的激励源对响应位置的噪声(振动)贡献量,是一种分析噪声源贡献大小的有效方法,不仅可以找到噪声源,而且可以通过贡献量排序找到其中主要的噪声。
4 仿真分析
4.1 噪声数据采集和分析
本文根据ISO 5128:2014、GB 1495—2002、GB/T 18697—2002等标准和文献[20]制定试验方案。车内噪声测点在乘员耳侧,车外噪声测点选取风噪声较为集中的A柱、后视镜等位置,振动测点选取发动机悬置点,数据采集过程中同时记录发动机转速信号。数据采集试验包括高速公路试验和半消声室试验。高速公路试验采集怠速、60 km/h、80 km/h、100 km/h、120 km/h 匀速工况下车外噪声和振动测点激励源信号,以及车内人员耳侧噪声信号。半消声室试验采集车外选定测点到车内人员耳侧路径的全局传递函数。测点布置如图4所示。

图4 测点设置
对采集到的数据进行处理分析,图5所示为不同工况下驾驶员右耳侧噪声频谱。从图5中可以看出,当车辆处于不同速度工作状态时,耳侧噪声能量主要集中在中低频(500 Hz以下),100~500 Hz频率段有明显的小波峰,频带分布特征适合采用噪声主动控制方法。
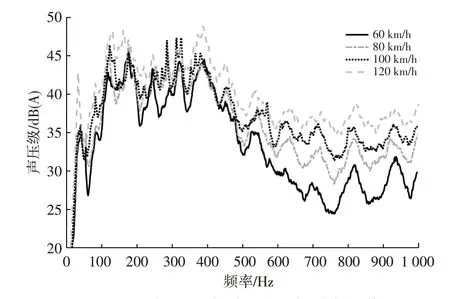
图5 不同工况下驾驶员右耳侧噪声频谱
对采集到的数据进行传递路径分析,结果表明:随着车辆从低速进入高速状态,乘员耳侧噪声的主要声源由发动机噪声变为A 柱风噪声和轮胎辐射噪声。汽车高速行驶时,A 柱、后视镜、轮毂的风噪以及轮胎辐射噪声是乘员耳侧峰值频率噪声的主要噪声源。在噪声能量集中频段(20~2 000 Hz),前轮、A 柱和后视镜风噪对乘员耳侧噪声贡献量较大,而且随着车速的提高,其在总贡献量中的占比逐渐增大。图6 所示为车速80 km/h 工况下各噪声源对驾驶员耳侧噪声的贡献量谱。从图6中可以看出,左、右A柱底端和左、右后视镜位置对乘员耳侧噪声贡献量较大。

图6 80 km/h车速下各噪声源对驾驶员耳侧噪声的贡献量频谱
4.2 主动控制结果分析
根据算法利用MATLAB 编写程序对采集的车内噪声进行主动控制仿真。次级路径通过低通滤波器模拟获得,如图7所示为模拟得到的长度为512的次级路径单位脉冲响应,图8为其频域特性。

图7 次级路径单位脉冲响应

图8 次级路径单位脉冲响应频域特性
针对80 km/h 的车速工况,选取驾驶员右耳侧为主动控制目标点进行仿真。分析此工况下的噪声频谱特征,根据发动机转速信号判断发动机的2阶噪声频率为54 Hz(4阶和6阶噪声不明显),根据阶次频率生成正弦信号作为参考信号。调整IVS-LMS 算法中的参数,直到算法对目标点信号的控制效果达到最佳状态,此时=0.04,=0.4,=40。经主动控制后,原始噪声信号和残余噪声信号频域对比如图9所示。从图9中可以看出,54 Hz 处的峰值消失,其他频段噪声基本没有变化。虽然54 Hz 处的峰值降低了约15 dB(A),但由于其他峰值基本没有变化,因此总的声压级控制前、后没有变化。

图9 发动机转速作为参考信号的主动控制效果
按照本文提出的基于智能数据融合的主动控制FxLMS 算法编写MATLAB 控制程序。首先根据传递路径分析结果选出在80 km/h车速工况下与驾驶员右耳侧噪声相关性大的信号(左A柱底端、右A柱底端、左后视镜、右后视镜、发动机噪声),根据这些信号和式(9)拟合出参考信号,设置各信号的幅值调节系数为1,然后根据控制后的各频率段降噪效果调整幅值系数,最终左、右A柱底端幅值调节系数为0.3,左、右后视镜幅值调节系数为0.2,发动机噪声根据转速信号判断阶次噪声频率。主动控制达到最优效果时,IVS-FxLMS 算法中=0.03,=0.5,=40。经主动控制后,原始噪声信号和残余噪声信号频域对比结果如图10所示。从图10中可以看出,500 Hz内的峰值频段明显降低。主动控制后噪声总声压级降低了4.4 dB(A)。

图10 数据融合作为参考信号的主动控制效果
5 结束语
在车内噪声主动控制过程中,为解决参考信号在车内容易受到次级声源污染和以发动机转速信号作为参考只能控制发动机阶次噪声的问题,本文提出了基于车辆不同工况和车外测点信号进行智能数据融合作为参考信号的噪声主动控制方法。对某车辆不同工况下车内、车外测点信号进行数据采集,利用MATLAB编写控制程序,以80 km/h车速工况下驾驶员右耳测点信号为控制目标点进行仿真。采用发动机转速信号拟合的参考信号只对发动机2阶54 Hz处噪声有较好的控制效果,主动控制前、后噪声总声压级没有变化。采用本文所提出的算法拟合的参考信号,500 Hz以下噪声峰值频率点都有明显的控制效果,并且主动控制后噪声总声压级降低了4.4 dB(A),证明本文所提出的算法能够抑制汽车车内噪声。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
科技资讯(2019年30期)2019-12-10
科学大观园(2019年10期)2019-09-10
证券市场周刊(2019年18期)2019-08-17
证券市场周刊(2019年19期)2019-05-27
中国经济周刊(2019年9期)2019-05-24
计算机辅助工程(2018年2期)2018-06-03
中国新技术新产品(2018年22期)2018-01-05
筑路机械与施工机械化(2016年12期)2017-01-13
现代电子技术(2014年16期)2014-08-20
