基于ANSYS Workbench的码垛机器人大臂静力学分析
2022-06-21 09:05王智森
河南工程学院学报(自然科学版) 2022年2期
王智森,胡 阳
(景德镇学院 机械电子工程学院,江西 景德镇 333000)
码垛简单来说就是按照一定的排列形式,把袋子或箱子等物品摆放整齐。近年来我国工业机器人技术快速发展,其中码垛机器人在各行业中的应用尤为显著[1]。传统的码垛是在人工操作下完成的,码垛机器人的诞生解决了人工操作费时、低效的问题[2]。码垛机器人具有结构简单、零部件少、占地面积小、适用性强、能耗低、维护方便等优点,已被广泛应用于制造、装配、运输、仓储等批量生产场合[3]。
国外码垛机器人技术的应用推广以美国、瑞典、德国、日本等为代表,主体结构材料大都使用轻质优良的铸造铝合金,具有较好的机械性能和抗震能力;国内码垛机器人技术起步于20世纪70年代,类型有直角坐标型、铰接式等,近年来多家产业基地应用国产机器人产品,提高了铰接式码垛机器人的市场竞争力并促进其工业化发展[4]。国内学者做了大量相关研究,如王哲哲等[5]借助SolidWorks设计了一种串并混联式码垛机器人,分别借助Adams和ANSYS进行主杆机构静力学和动力学仿真分析,验证了其结构设计的合理性及可靠性;吴刚[6]借助MATLAB对高速重载码垛机器人机构进行了运动轨迹优化;王红州等[7]借助ANSYS对混联码垛机器人主要部件进行了受力分析并制造样机验证;李渊龙[8]借助SolidWorks、Adams和MATLAB对关节式码垛机器人驱动部分三维建模并进行运动学仿真分析,制造样机并测试了其工作性能。大臂作为码垛机器人的关键零部件之一,其结构强度与运动惯性影响着码垛机器人工作过程中的控制精度。本研究以某型四自由度码垛机器人为对象,基于性能参数利用UG和ANSYS Workbench软件设计大臂结构并进行了静力学分析。
1 码垛机器人整体结构设计
1.1 码垛机器人性能参数
码垛机器人常见的驱动系统有3种类型:气压驱动系统、液压驱动系统和电机驱动系统。相比前两种,电机驱动系统具有结构紧凑、启动时间短、控制精度高、无累积误差、维修方便、寿命长等优点,适用于复杂的工况环境[9]。某型四自由度码垛机器人的工作性能参数如表1所示。
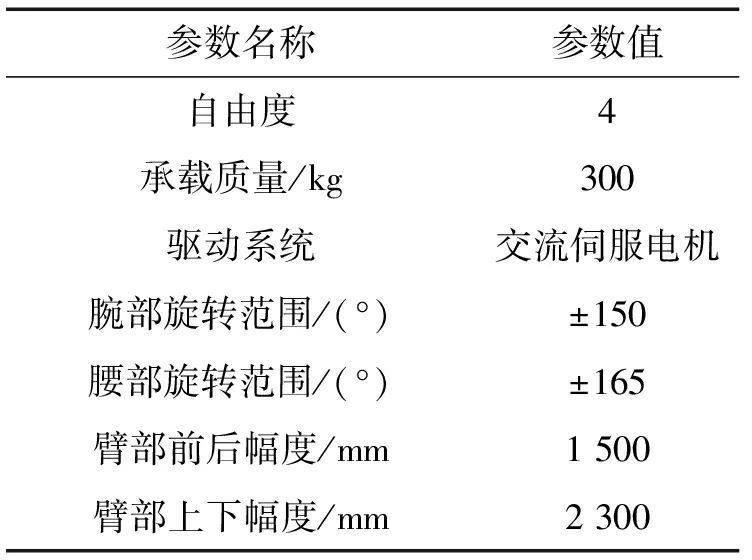
表1 某型四自由度码垛机器人性能参数Tab.1 Performance parameter of a 4-DOF palletizing robot
码垛机器人的工作原理是通过4个舵机运转实现整体机构的运动,具有4个自由度,分别是大臂摆动、小臂摆动、腰部旋转及腕部旋转[10]。大臂舵机和小臂舵机直接与驱动连杆相连,舵盘与转向器结合,传递了舵机的驱动力。码垛机器人可以固定在底座上,腰部轴承和舵机组合在一起以实现自身的旋转。码垛机器人的大臂由腰部和底座连接一体形成支撑,并且大臂可以在与舵机一起摆动的同时随腰部摆动。码垛机器人的小臂由大臂主体的上关节支撑,舵机驱动并带动小臂连杆,小臂连杆驱动码垛机器人的小臂完成小臂俯仰运动。码垛机器人腕部处于小臂主体前端,由腕部舵机驱动搬运物体并实现腕部旋转运动。
1.2 码垛机器人三维建模
大臂、小臂和末端的自重都是靠码垛机器人底座来承载的。底座负责整个承载机构的旋转并且能够实时调整码垛机器人机械臂的工作位置。作为承载机构,必须具备可靠的稳定性,用来处理工作过程中可能发生的负载突变情况,同时配置一整套适配驱动器输出组件以满足系统控制要求。根据某型四自由度码垛机器人底座部件的实际尺寸,通过UG软件构建了简化的底座三维模型,如图1所示。

图1 底座三维模型Fig.1 Three-dimensional model of base
码垛机器人的腰部是连接底座和手臂并支撑整个臂部质量的重要部分,而腰部舵机则驱动整个码垛机器人实现旋转运动。码垛机器人的腕部连接抓取机构,需要完成腰部、臂部等的动力传递,同时控制微调手柄的姿势,保证码垛机器人能够精确操作。抓握机构可以相对于被运输的货物适当定位,有利于提高抓握精度和强度。
根据某型四自由度码垛机器人各零部件的实际尺寸,通过UG软件构建简化的码垛机器人整体结构三维模型,如图2所示。码垛机器人整体由旋转轴来控制运动,底座通过旋转轴带动整个执行机构旋转,关节处均通过旋转轴连接。将各零部件进行装配并添加约束,模拟码垛机器人机械臂的工作过程。
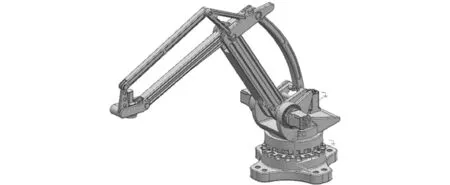
图2 码垛机器人整体结构三维模型Fig.2 Overall three-dimensional model of palletizing robot
1.3 大臂结构特征
码垛机器人的臂部设计要求考虑以下5点:增大臂部结构的强度,避免臂部尺寸较大时结构刚度不足发生弯曲变形,导致无法精确执行装载拆卸操作;臂部质量满足轻量化设计,避免工作过程中产生较大惯性,导致系统定位不稳定;避免潜在的组件干扰及零部件间的相互碰撞风险;方便拆装,针对易损机构需要考虑方便维护和更换损坏的零件;环境适应性好,能够满足多工况使用要求。
码垛机器人的机械臂(图3)主要由臂部和辅助臂组成,通过旋转轴带动旋转,保证各部分关节灵活运动,其中辅助臂起到缓冲减震的作用。腕部通过小臂和辅助小臂装配形成活动机构,同时小臂通过末端的2个旋转关节与大臂、辅助大臂装配。大臂、辅助大臂、三脚架及平衡臂通过4个旋转关节装配连接形成一个平行四边形并固定在腰部,与此同时辅助小臂、腕部、小臂和三脚架也形成另一个平行四边形。2个平行四边形的联动设计能够保证腕部的中心轴始终与底座平面垂直。在整个臂部受力结构中,大臂作为机械臂的关键部件,承载能力要求最高。

图3 码垛机器人机械臂组成结构Fig.3 Composition structure of palletizing robot mechanical arm
2 码垛机器人关键部件有限元分析
2.1 关键部件受力分析
大臂、腕部及小臂均是码垛机器人的关键零部件,工作过程中腕部大约承受300 kg的载荷,同时将载荷合理传递到大臂、小臂和其他零部件上。码垛机器人机械臂的大臂、腕部、小臂质量分别为100 kg、40 kg、60 kg。
当码垛机器人机械臂在负载情况下处于静止状态时,腕部要承受约300 kg的载荷。首先对腕部进行受力分析,如图4所示。

图4 腕部受力分析图Fig.4 Stress analysis diagram of wrist
(1)
将载荷参数、腕部质量参数及各点作用力臂参数代入方程组(1),联立求解得到腕部连接处受到的作用力和作用力矩:F1y=2 812 N,M2=253 N·m。当小臂处于水平状态且大臂处于竖直状态时,大臂和小臂产生的变形量最大。选择此时刻位置分别对小臂、大臂进行受力分析,由于计算量较大,小臂受力分析过程在此省略。为了方便列出作用力和作用力矩平衡方程,将大臂受力分析图逆时针旋转90°放置,得到大臂结构的受力分析图(图5)。其中,c3为大臂的质心。根据空间力系平衡方程列出大臂受力的方程组:

图5 大臂受力分析图Fig.5 Stress analysis diagram of large arm
(2)

2.2 大臂静力学仿真分析
根据计算得到的大臂受力分析值对大臂进行静力学仿真分析。在四自由度码垛机器人整体结构中,大臂是支承和抗弯扭的关键零部件之一。为了避免工作过程中机械臂大臂出现断裂、疲劳裂纹及支承面被压溃的情况,对大臂进行结构静力学分析,求出最大应力值及最大变形量等进行校核。
ANSYS软件是一款计算应力场等的大型工程仿真分析软件,支持与大部分计算机辅助设计软件如UG、Pro/E及SolidWorks等共享和交换数据,可提供近百种单元类型,能够仿真模拟出不同种类的结构受力情况。将大臂三维模型另存为IGS格式的文件,导入ANSYS Workbench软件中进行数值求解和仿真分析。在ANSYS Workbench 15.0界面的“Project Schematic”窗口中单击“Engineering Data”选项,弹出定义悬臂材料特性对话框,定义大臂材料属性:大臂材料为45#,屈服强度为335 MPa,抗拉强度为600 MPa,泊松比为0.269,弹性模量为209 GPa,密度为7 890 kg/m3。在“Mechanical”窗格的树形目录中单击“Mesh”分支,激活网格尺寸,划分“Sizing”命令。在“Sizing”的属性窗格中选择整个悬臂实体,“Scope”分支下的“Geometry”显示为1 Body;对大臂三维模型进行简化处理,在主体尺寸不变情况下忽略边圆角细小特征,以长度为10 mm的单元对大臂划分网格(图6)。
图6 大臂的网格划分Fig.6 Meshing of large arm
对划分完网格的大臂施加载荷边界条件,分别对大臂与小臂、腰部连接旋转轴中心处施加2.1节中计算得到的作用力和作用力矩,单击“Environment”工具栏属性窗格“Definition”分支下的“Direction”设置作用力和作用力矩方向。在“Mechanical”窗格的树形目录中单击“Solution”分支,单击“Solution”工具栏中“Stress”的“Equivalent”命令,添加“Equivalent Stress”结果;单击“Solution”工具栏中“Deformation”的“Total”命令,添加“Total Deformation”结果。单击工具栏内的“Solve”命令,对大臂静力学模型进行求解,得到大臂的应力云图(图7)和应变云图(图8)。由图7可知,大臂结构受到的最大应力为23.972 MPa,最大应力位置在大臂与小臂及三脚架的连接部位;由图8可知,大臂最大等效应变为0.035 85 mm,大臂结构应变值较小。仿真分析结果表明:大臂受载条件下最大应力值为23.972 MPa,在结构钢材料的屈服强度值安全范围(335 MPa)内,最大变形量为0.035 85 mm,位移幅度较小,刚性较强,能够保证码垛机器人机械臂在工作过程中正常码垛作业。

图7 大臂应力云图Fig.7 Stress cloud chart of large arm
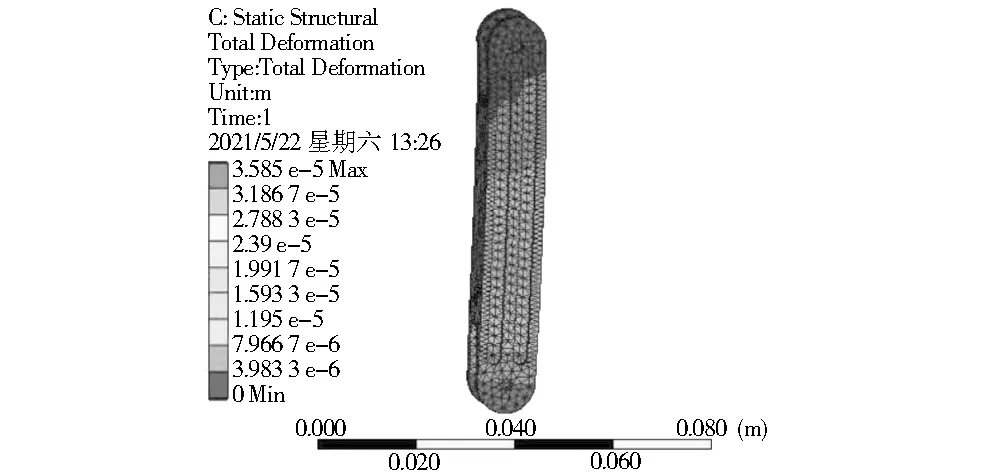
图8 大臂应变云图Fig.8 Strain cloud chart of large arm
3 结语
本研究以某型四自由度码垛机器人为例,运用UG和ANSYS Workbench软件进行了码垛机器人整体结构设计及大臂静力学仿真分析。大臂作为码垛机器人机械臂的关键零部件之一,对其两端连接处分别进行受力分析,得到大臂与小臂连接处的作用力为2 415 N,大臂与腰部连接处的作用力为3 415 N。对大臂进行静力学分析,得到大臂结构最大应力为23.972 MPa,最大等效应变为0.035 85 mm,说明在受载条件下大臂不会出现断裂及弯曲变形现象。

猜你喜欢
橡塑技术与装备(2022年11期)2022-11-08
中国典型病例大全(2022年9期)2022-04-19
现代制造技术与装备(2022年1期)2022-02-21
中老年保健(2021年5期)2021-08-24
中老年保健(2021年6期)2021-08-24
中老年保健(2021年7期)2021-08-22
商品与质量(2020年35期)2020-11-06
电子制作(2019年20期)2019-12-04
载人航天(2016年4期)2016-12-01
科学时代·上半月(2013年6期)2013-08-22