基于工业机器人的“智能制造”柔性生产线结构设计分析
2022-06-24 22:09方群霞梁志新
科技资讯 2022年11期
方群霞 梁志新

摘要:在工业机器人智能制造柔性生产线中,我国提出智能制造自动化装备等细分产业,需要更好地实现FMC柔性制造系统以及FMC柔性制造单元,以确保能够更好地走入正轨。在安装过程中,以行走导轨机器人为基础,实现有效控制。在智能制造柔性生产线中,整个生产线包含了数控机床、数控加工中心以及相关的上料机构以及取料机构。在运行时,取料台上方安装了相关的视觉系统。当更换加工产品时,机器人必须做出调整,以便可以根据不同的产品类型进行加工。具备极高的柔性特征,可以更好地完成柔性制造。因此,在本文的研究中,该文将就工业机器人的智能制造柔性生产线结构设计分析展开讨论。
关键词:工业机器人 智能制造 柔性生产线 结构设计
中图分类号:TP242.2文献标识码:A 文章编号:1672-3791(2022)06(a)-0000-00
工业机器人在未来是工业领域的发展趋势,工业机器人包含了机械手以及多功能、多角度的机械装置,可以更好地替代人工作业,完成高效率作业目标。其中,在柔性制造系统以及柔性制造单元中,作为重要的组成部分之一,可以更好地实现工业机器人的制造工艺,完成零件抓取、上料、零件转移等。这些工作量可以更好地应用于大批量以及小部件的加工,可以有效节约人力成本,保障运行效率。在设计柔性生产线结构时,以工业机器人为载体,可以替代人工完成自动化操作,柔性功能强大,还可以设计出合理精准的智能制造生产线。因此,为了更好地了解工业机器人的特性,可以以汽车端盖为载体,并针对汽车端盖的加工流程进行研究。可以实现生产布局、工作原理、逻辑控制等优化,达成融合加工。
1柔性生产线工作原理
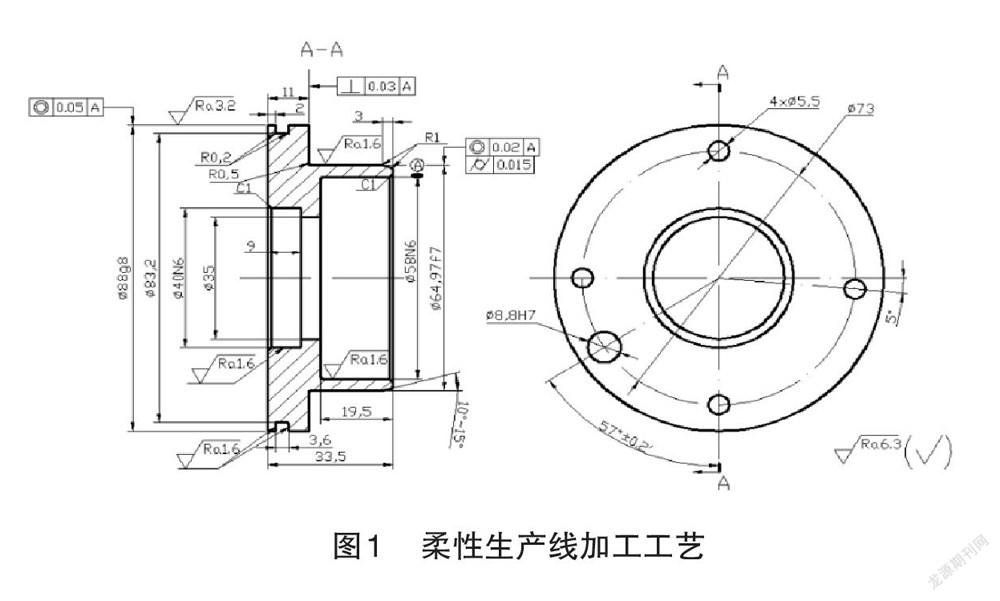
对柔性生产线的工作原理进行分析,柔性生产线包含了各种零件,如载体零件以及加工零件等,需要根据零件的需求,设计一系列的工序。如加工工序,数控车床可以通过专门的三爪夹持毛坯左端内孔完成应用。柔性生产线在汽车制造领域发挥了重要的作用,通过柔性化管理,可以为生产线带来时间以及成本优势,还可以提升工作效率[1]。将具备价格竞争优势的优质产品带入市场中,就市場上小批量、多品种,且生产线更换较为频繁的现状而言,柔性生产线极为灵活多变。柔性生产线采用的积木式结构,在短时间内可以进行调整,按照生产需求生产相应商品,构建柔性的生产机制。基于工业机器人智能制造的柔性生产线建设,在工作原理上,其具备提高的优势,且能够更好地完成生产线整体布局以及运行流程,建立了一套标准的子系统。整个生产实践应用价值较高,在柔性化生产线中,涉及到复杂技术,拥有高度自动化系统。例如,在实际运行时,柔性生产线就可以将微电子学、计算机以及系统工程进行全面结合,解决机械制造自动化以及高柔性化之间的矛盾。设备利用率极为高效,且更为稳定灵活,具备极强的产品硬件能力。目前,柔性生产线已经建立了模组化生产,可以实现对于线性产品的随意拼装、衔接,完成积木式组合结构。方便重组,拆卸方便,能够满足现代化企业的制造需求(如图1所示)。
2工业机器人工作原理
柔性生产线工业机器人工作原理,通过数控车床柔性工作生产流程进行,可以实现对于人工生产的绝对替代。在自动化、智能化程度上,表现极为优势。零件加工与柔性功能更为强大,在柔性生产线的基本组成以及工作原理中,可以根据以下流程进行融合[2]。
例如,工作站启动后,机器人、上料机构复位→随后,上料的机器人到上料机构取件→随后安装至第一台数控机床上→车削零件左端外形后发出信号→通知机器人取件→在机器人取件后掉头→并将其安装至第二台数控机床上→车削零件左端外形后发出信号→通知机器人取件→机器人取件完毕后→安装至第一台数控机床上→零件各孔位加工完毕后→发送信号→通知机器人取件→机器人取件后→放置至下料输送线上。
因此,通过一系列的流程,可确定工作工业机器人的工作原理,即通过数控机床自动化操作流程实现一系列的操作工序。
3柔性生产线工作流程
在柔性生产线工作流程中,柔性生产线的工作结构设计包含了以下几点。
(1)柔性生产线。通过多台可调控机床以及专用机床联合组成,配合自动运输装置以及直接组成生产线,在柔性生产线上包含了计算机管理体系,通过计算机电脑操控并配合多种生产模式,显著地减少生产成本,保障做到柔性生产、物尽其用。柔性生产线的工作原理必须明确载体零件加工工艺,根据生产过程,就加工工序进行优化。例如,数控车床在工作程序中,使用三爪夹持毛坯左端内孔位置,对车削右端外形进行操作[3]。
(2)包含了掉头操作。利用内三爪直接配合毛坯左端设计内孔位置。
(3)采用平头虎钳装夹设计柔性生产线外圈,并在数控加工过程中,明确各种加工孔的尺寸[4]。
4柔性生产线结构设计
在柔性生产线结构设计中,柔性生产线结构包含了总体布局以及重要部件、自动生成机构等[5]。其中,在生产线总体布局中,根据自身结构需求,考虑其相关的成本以及多种产品的加工模式,必须进行优化。设置出柔性生产线,就整体布局进行改良。例如,在制造柔性生产线时,通过数控车床以及数控中心,制定工作机器人的工作流程,明确操作系统,如工作机器人的视觉系统、衔接系统等,且可以保障工业机器人在行走导轨上能够更好地完成零件传递、上料、下料工作,实现自动化操作。自动上升机是流程生产线的重要组成结构(如图2所示)。
自动上升机自身结构包含了渠道以及回转,其中在回转中,工作台依托电机以及减速齿轮进行工作,完成旋转。在上方,可以根据实际需要设置孔位。就一般而言,孔位数量为8孔,整个导柱可一次性贯穿多达18个零件。在渠道中,伺服电机以及滚珠丝杆可以进行移动操作,随后在丝杆的螺母上方可以安装。取料台的手纸由气缸控制,完成前、后伸缩运动。在取料台上方设置视频拍摄系统,可以侦测到准确位置并提供数据信息。在工作过程中,回转渠道、机构将工作台倒入旋转在工作位置后,机构可以向下移动,气缸结构手臂伸出了取料台,可移动,完成零件的拿取,以便能够更好地实现精准的上料工作[6]。0A907F58-82A3-453B-A980-6CBDCBAD6F33
视觉系统可以在工作中进行拍摄,例如将零件的摆放位置以及取料位置进行比对,并使二者之间的偏移量能够存入数据库中。通过对于数据库的读取,可以更好地传递,使机器人并可以进行精准的取料,按照顺序,对数控机床进行加工处理。而在下料输送线中,下料输送线将已加工好的零件完成同一工位传输,采用铰链传输的方法,通过三相异步电机开始工作传送面板,将工件传递至取料机,随后取掉工件。通知其他设备,并安装一台中转取料装置。当工件在第一机床加工完毕后,工件夹的另一端可以将工件放置于中转台上[7]。
例如,在自动上料机构中,工业机器人智能制造柔性生产线子系统可以更好地完成实践应用。在自动上料机构构建过程中,由专业的毛坯件自动上料,包含了取料机构以及回转上料机构两大部分。在回转上料机构上,可以实现实施旋转完成运动优化,并在上料中,專门设计8~10个工作位,确保工位安装导度,导出零件到位[8]。此外,在取料机构中,在丝杆螺母的位置安装取料台,取料台气缸前后收缩,控制在取料台上方视觉架构中,使整个取料检测精准、合理。在自动上料机构的工作过程里,分析其回转上料机构组成模式,并对导柱旋转位置进行分析,确定上下移动工作系统,确保高度到位。在该过程中,可以利用视觉模式,例如对于零件可以实现偏差修正。
在下料输送线系统中,下料输送线系统主要负责加工已加工好的零件并实施下一位传输操作。在传输方式中,包含了铰链传输,配合三相异步电机,实施减速装置,完成有效驱动。在检测放料以及取料过程中,需要结合取料上方视觉系统进行调整,有效检测取掉准确位置在后续工作中对放料位置传感信号进行分析,并通过三相异步电机展开生产操作,实现视觉系统的优化,明确准确定位。而在中转前,中转台系统由微型模块构成,主要包含了工件掉头装夹操作。利用工业机器人取出工件,并加换工件两端,中央转台系统配合手抓结构,可以提高生产节奏,实现双工位设计优化,确保零件夹持在工位上顺利进入机床。在旋转180°后,设置三位一体的五通电磁阀,配合气电路进行综合控制,保障电磁阀中位能够起到断电保护作用[9]。
5柔性生产线结构分析——手爪设计
在柔性生产线的手爪结构设计中,其结构需要更好地提升生产力。工业机器人采用工位设计,在进入车床前,就需要将未加工的工件夹持至工位上。因此,进入机床后,可以使用工位取下机床卡盘,工件旋转至180°,对工件进行调节。例如,将工件1安装至机床卡盘上,随后手爪支架进行优化。在左右两边,可额外连接套筒,安装三爪气缸。在工作位置上,工件满足硬件的有效需求,可以更好地实现零件加工。手爪不仅直接安装在机器人上,同时通过快速接头进行衔接,还可以更好地通过工件固定法兰轴,并实现公头、母头的快速连接,固定在机器人手爪上。仅需要快速地转接头,与母头、公头衔接即可(如图3所示)。
在手爪设计中,使用三爪气缸进行夹持动作。对空气进行压缩,随后通过电动气动三联件完成过滤脱水。利用四联通接管,将其分为3条线路,实现气缸壁的控制,更好地完成接头的快速抓取以及断开。在手爪的前两个气缸以及快速接头的气路连接中,通过三位的电磁阀气流控制后,连接至手爪气缸的进气以及出气口,起到有效的断电保护作用[10]。
6结语
综上所述,工业机器人是目前国内外应用自动化技术的新生军,为了生产厂家提供了全新的工作模式。重视柔性生产线,并将其自动上料、下料的方式引用实际生产中。因此,该文设计智能柔性生产线,可以更好地完成适应性的推广,加大节约人力成本,完成加工精度。提升了生产节拍,避免与其他设备出现干扰,得到大力推广以及应用。
参考文献
[1] 关长明.工业机器人“智能制造”柔性生产线设计分析[J].装备维修技术,2021(8):21-23.
[2] 崔卫星.基于工业机器人的智能制造生产线设计方法探析[J].河北农机,2021(15):75-76.
[3] 陈涛,杲春芳.基于工业机器人的智能制造单元设计[J].自动化技术与应用,2019,38(10):29-32.
[4] 李博文,韩宝国.创新驱动智能制造研究——基于高端装备制造业及工业机器人的专利现状分析[J].广东轻工职业技术学院学报,2019,18(2):32-36.
[5] 王宝鑫.智能制造时代的工业机器人发展新趋势分析[J].发明与创新:职业教育,2019(1):66.
[6] 吴斌.基于工业机器人的智能制造生产线设计[J].机床与液压,2020,48(23):55-59.
[7] 马超凡.基于智能制造时代的工业机器人发展探讨[J].技术与市场,2020,27(9):96-97.
[8] 乌海东.智能制造背景下工业机器人在冲压自动化生产线中的应用研究[J]. 轻松学电脑,2019(25):46.
[9] 刘莹.工业机器人及智能制造发展现状和发展趋势分析[J].数码世界,2019(11):276.
[10] 雷红华.智能制造背景下的工业机器人技术专业人才培养研究——湖北省教育科学“十二五”规划课题《工业机器人技术专业课程体系的研究》成果介绍[J].襄阳职业技术学院学报,2019,18(3):137-140.0A907F58-82A3-453B-A980-6CBDCBAD6F33
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
科学与财富(2021年36期)2021-05-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
神州·上旬刊(2017年9期)2017-10-15
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19