
单相直流无刷电机及其控制设备和控制方法
2022-06-29 06:21
电动工具 2022年3期
授权公告号:CN110022100B
授权公告日:2022.04.22
专利权人:博世电动工具(中国)有限公司
发 明 人:吴健
无刷直流(BLDC)电机利用电子换相器取代了机械电刷和机械换相器,使这种电动机不仅保留了直流电动机的优点,而且又具有交流电动机的结构简单、运行可靠、维护方便等优点。因此,无刷直流(BLDC)电机被各种电动工具采用。在各种类型的无刷直流(BLDC)电机中,单相直流无刷电机尤其具有寿命长、加速快、结构简单、成本低等优点。但是,现有的单相直流无刷电机由于其自身的电气特性而仅能在一个方向上旋转。这样一来,采用单相直流无刷电机的电动工具也只能在一个方向上作用。当某一操作工作需要电动工具时而在一个方向上旋转,时而在另一个相对方向上旋转时,采用单相直流无刷电机的电动工具就无法满足这样的需求了。因此,亟需一种改进的单相无刷直流电机,以克服现有技术中存在的缺陷。
发明专利“单相直流无刷电机及其控制设备和控制方法”涉及电机及电机控制领域,具体地,涉及单相直流无刷电机、以及单相直流无刷电机的控制设备和控制方法。
发明内容
发明提供一种改进的单相无刷直流电机,其具有改进的控制设备,使得单相无刷直流电机能够以正转和反转两种方式启动并运转。为此,根据发明的一个方面,提供了一种单相直流无刷电机的控制设备,其中,电机的本体包括有转子和定子,定子由多个线圈绕组相连构成,转子由1 对或多对N 极和S 极交替排列的磁极构成,控制设备包括:第一位置检测装置,安装于电机的本体,用于检测转子的位置,输出转子位置信号;预定角度检测装置,用于检测转子是否相对于第一位置检测装置正向旋转了预定角度,输出检测信号;换相电路装置,与电机本体相连,用于切换对线圈绕组的通电相序,以控制转子的旋转方向及运转;以及控制装置,与第一位置检测装置、预定角度检测装置和换相电路装置相连,其中,控制装置被配置为在接收到反转启动指令时,根据从第一位置检测装置接收的转子位置信号控制换相电路装置给线圈绕组的通电相序,以使得转子正向旋转;并被配置为当从预定角度检测装置接收的检测信号指示转子相对于第一位置检测装置正向旋转了预定角度时,控制换相电路装置给线圈绕组的通电相序,以使得转子反向旋转。在一个实施例中,控制装置还被配置为:在转子位置信号的状态每次改变时,控制换相电路装置切换给线圈绕组的通电相序,转子位置信号的状态改变指示与第一位置检测装置相对的转子的磁极改变。
预定角度检测装置是第二位置检测装置,用于检测转子的位置并输出转子位置信号,第二检测装置(220’)相对于第一位置检测装置(210)位于转子(110)的正转方向上,第二检测装置(220’)与第一位置检测装置(210)中间的偏离角度对应于预定角度,转子(110)正向旋转了预定角度时,第二位置检测装置输出的转子位置信号的状态变化。第二位置检测装置被设置为与第一位置检测装置和述定子的同一线圈绕组相对,第二位置检测装置与第一位置检测装置之间的偏离角度以及第一位置检测装置相对于与其相对的线圈绕组起始点的偏离角度之和小于一个线圈绕组的机械角度。第一位置检测装置和第二位置传感器分别采用霍尔传感器、轴角传感器或光电传感器中的一种。预定角度检测装置是定时器,控制装置被配置为在所述转子正向旋转的同时使能定时器,定时器的计数值达到预定计数值表示转子正向旋转了预定角度。控制设备还包括驱动装置,驱动装置与控制装置和换相电路装置相连,用于根据控制装置的输出而输出相应的驱动信号。换相电路装置采用H 桥式电路,由4 个功率逻辑开关两两连接成的2 个半桥组成,各半桥的输出端分别与线圈绕组相连,驱动信号使得各功率逻辑开关导通或关断,以控制线圈绕组的通电相序。控制设备还包括信号处理装置,与第一位置检测装置、预定角度检测装置和控制装置相连,用于对第一位置信号和检测信号进行信号处理,将经处理的信号输出给控制装置。控制装置采用单片机或DSP 或ARM。
根据发明的另一个方面,提供了一种单相直流无刷电机的控制方法,其中,电机的本体包括有转子和定子,定子由多个线圈绕组相连构成,转子由一对或多对N 极和S 极交替排列的磁极构成,控制方法包括:获取反转启动指令;根据由第一位置检测装置所检测的转子位置信号控制对线圈绕组的通电相序,以使得转子正向旋转;判断转子是否相对于第一位置检测装置正向旋转了预定角度;以及如果判定为转子正向旋转了预定角度,则线圈绕组的通电相序被切换,以使得转子反向旋转。控制方法还包括:在每次检测到转子位置信号的状态变化时,给线圈绕组的通电相序被切换,其中转子位置信号的状态变化表示与第一位置检测装置相对的转子的磁极变化。判断转子是否相对于第一位置检测装置旋转了预定角度包括:判断由第二位置检测装置所检测的转子位置信号的状态是否变化,第二位置检测装置所检测的转子位置信号的状态变化表示转子正向旋转了预定角度。判断转子是否相对于第一位置检测装置旋转了预定角度包括:在转子正向旋转的同时使能定时器;以及判断定时器的计数值是否达到预定计数值,定时器的计数值达到预定计数值表示转子正向旋转了预定角度。
根据发明的又一个发面,提供了一种单相直流无刷电机,其包括:本体,具有转子和定子,定子由多个线圈绕组相连构成,转子由一对或多对N 极和S 极交替排列的磁极构成; 与本体相连的控制设备,控制设备包括:第一位置检测装置,安装于电机的本体相连,用于检测转子的位置,输出转子位置信号;预定角度检测装置,用于检测转子是否相对于第一位置检测装置正向旋转了预定角度,输出检测信号;换相电路装置,与电机本体相连,用于切换对线圈绕组的通电相序,以控制转子的旋转方向及运转;以及控制装置,与第一位置检测装置、预定角度检测装置和换相电路装置相连,其中,控制装置被配置为在接收到反转启动指令时,根据从第一位置检测装置接收的转子位置信号控制换相电路装置给线圈绕组的通电相序,以使得转子正向旋转;并被配置为当从预定角度检测装置接收的检测信号指示转子相对于第一位置检测装置正向旋转了预定角度时,控制换相电路装置给线圈绕组的通电相序,以使得转子反向旋转。根据发明的单相直流无刷电机其本身适用性更广,尤其是能够应用于两个方向旋转的电动工具。
实施方式:
发明总体上涉及单相直流无刷电机,其包括电机本体和与电机本体相连的控制设备。电机本体包括定子和转子。单相直流无刷电机在结构上会对定子的齿槽进行不对称处理,以产生不对称的气隙磁阻,从而克服电磁转矩死点。也就是说,对于单相直流无刷电机,在不通电的状态下,转子的磁路中心线偏离定子中心线(图1a 中的AA’、BB’)一定角度。将偏离定子中心线的方向定义为电机转子的正转向,另一个方向则为电机转子的反转向。例如,参照图1a 中例示的不对称结构,逆时针方向为正方向。应当理解,对于单相直流无刷电机,也可以在结构上设计为与图1a 中的不对称结构相反的样式,则相应地,顺时针方向为正方向。使得电机转子正向旋转的通电相序定义为正相序(或第一相序),使得电机转子反向旋转的通电相序定义为反相序(或第二相序)。当然,正向和反向是相对的概念,以其他适合的方式来限定电机转子的转向与通电相序的对应性也是可以的。单相直流无刷电机基于其在结构上的不对称设计,在正转启动时能够越过电磁转 矩死点,顺利进入加速状态。
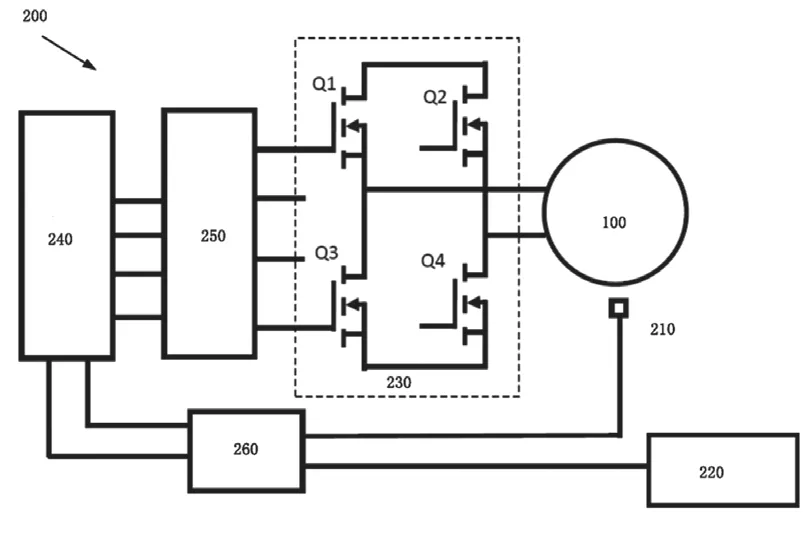
图1a
发明的技术方案使得单相直流无刷电机能够反转启动的控制设备以及控制方法。图1a 示出了根据发明的一个实施方式的单相直流无刷电机的控制设备的方框图。图1b 是图1a 中例示的单相直流无刷电机的本体和控制设备的示意图,其中,电机本体100 包括转子110 和定子120。定子120 具有多个线圈绕组,这些线圈绕组相连成单相的结构。转子110 具有1 对或多对磁极,这些磁极被排列为N 磁极和S 磁极交替布置。在图1b 中,示出了定子由4 个线圈绕组相连构成的例子,但发明不限于此,线圈绕组的个数和排列方式可以以其他的适合方式来实现。在图1b 中,示出了转子由4个(2 对)磁极构成的例子,但是发明不限于此,磁极的对数可以为其他的数量。如图1a 所示,根据本发明的单相直流无刷电机的控制设备200 包括:第一位置检测装置210、预定角度检测装置220、换相电路装置230 和控制装置240。第一位置检测装置210 与电机本体100 相连,用于检测转子110 的位置,输出转子位置信号。在图1b 中,示出了第一位置检测装置210 位于定子槽中心线AA’上,但是不限于此。第一位置检测装置210 可以设置在其他的任何适当位置。预定角度检测装置220 与电机本体100 相连,用于检测转子110 是否相对于第一位置检测装置110 正向旋转了预定角度α,输出检测信号。换相电路装置230 与电机本体100 相连,用于切换对线圈绕组的通电相序,以控制转子110 的旋转方向。控制装置240 与第一位置检测装置210、预定角度检测装置220 和换相电路装置230 相连。控制装置240 接收第一位置检测装置110 输出的转子位置信号和预定角度检测装置220 输出的检测信号,并根据转子位置信号和检测信号来控制换相电路装置230 给线圈绕组的通电相序。第一位置检测装置210 例如是霍尔传感器,根据与其相对的是转子的N 磁极还是S 磁极而输出高电平信号或低电平信号。例如,N 磁极对应于高电平信号,S 磁极对应于低电平信号,或者反过来也是可以的。当控制装置240 监测到转子位置信号的状态变化时,即高低电平的变化(例如,高电平变为低电平或低电平变为高电平),也就是与第一位置检测装置210 相对的转子磁极变化时,控制装置240 控制换相电路装置230 切换对线圈绕组的通电相序。预定角度检测装置220 例如是角度传感器,对转子110 相对于第一位置检测装置110 的旋转角度进行检测。当控制装置240 监测到角度传感器输出的检测信号表示转子110 相对于第一位置检测装置110 正向旋转了预定角度α 时,控制换相电路装置230 切换对线圈绕组的通电相序。
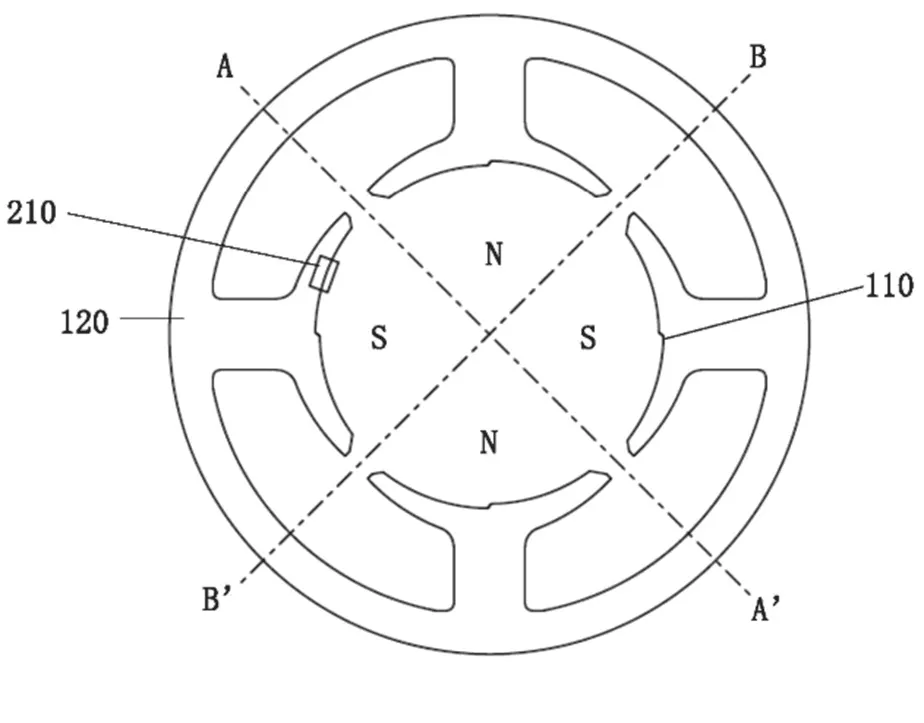
图1b
以下,具体说明采用本发明的控制装置200 来控制单相直流无刷电机反转的过程。控制装置240 在接收到反转启动指令时,根据从第一位置检测装置210 接收的转子位置信号控制换相电路装置230 给线圈绕组的通电相序,以使得转子110 正向旋转。控制装置240 监测从预定角度检测装置220 输出的检测信号。当控制装置240 判定为该检测信号指示转子110 相对于第一位置检测装置210 正向旋转了预定角度α 时,控制换相电路装置230 给线圈绕组的通电相序,以使得转子110 反向旋转。在控制装置240 监测到第一位置检测装置210 输出的转子位置信号的状态每次改变时,控制换相电路装置230 切换给线圈绕组的通电相序。第一位置检测装置210 输出的转子位置信号的状态改变表示与第一位置检测装置210 相对的转子磁极变化。也就是说,在每次与第一位置检测装置210 相对的磁极改变时,切换对线圈绕组的通电相序,以维持电机转子110 始终朝着希望方向旋转。控制装置240 采用单片机或DSP 或ARM。应当理解,控制装置240也可以采用其他适合的方式来实现,不限于此。
继续参见图1a,根据发明的单相直流无刷电机的控制设备200 还包括驱动装置250 和信号处理装置260。驱动装置250 与控制装置240 和换相电路装置230 相连,用于根据控制装置240 输出的控制信号来输出相应的驱动信号,以驱动换相电路装置230。信号处理装置260 连接在第一位置检测装置210 的输出端和预定角度检测装置220 的输出端与控制装置240 的输入端之间。信号处理装置260 对第一位置检测装置210 输出的转子位置信号和预定角度检测装置220 输出的检测信号进行信号处理,例如滤波处理和/或整形处理,并将经处理的信号输出给控制装置240。换相电路装置230采用H 桥式电路,由4 个功率逻辑开关Q1、Q2、Q3 和Q4 两两连接成的2 个半桥(Q1-Q2 和Q3-Q4)组成,各半桥的输出端分别与线圈绕组相连。驱动装置250 输出的驱动信号使得各功率逻辑开关Q1、Q2、Q3 和Q4 导通或关断,以控制线圈绕组的通电相序。例如,当对线圈绕组进行第一相序通电时,Q1 和Q3 导通,且Q2 和Q4 关断。当对线圈绕组进行第二相序通电时,Q1 和Q3 关断,且Q2 和Q4 导通。当然,通电相序与各功率逻辑开关的导通或关断的对应性也可以以其他方式来限定。功率逻辑开关Q1、Q2、 Q3 和Q4 均为功率金属场效应管。预定计数值与预定角度α 相对应。定时器220”输出的计数值达到该预定计数值表示转子110 正向旋转了预定角度α。当控制装置240 判定为定时器220”输出的计数值达到预定计数值时,控制换相电路装置230 给线圈绕组的通电相序,以使得电机转子反向旋转。

图2a

图2b

图3

图4
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
宁夏电力(2022年1期)2022-04-29
防爆电机(2022年1期)2022-02-16
电气技术(2022年1期)2022-01-26
载人航天(2021年5期)2021-11-20
孩子·小学版(2020年6期)2020-02-24
科学导报·科学工程与电力(2019年24期)2019-09-10
山东工业技术(2017年16期)2017-09-05
湖南大学学报·自然科学版(2014年3期)2014-12-30
农机使用与维修(2014年1期)2014-09-23
