
一种前瞻性视频拍摄和车辆碰撞预警的方法
2022-07-02 00:49钟克华庞健宇蒋建辉刘涵昱朱汉举
汽车电器 2022年6期
钟克华, 庞健宇, 蒋建辉, 刘涵昱, 朱汉举
(广州汽车集团股份有限公司汽车工程研究院, 广东 广州 510640)
1 前言
汽车碰撞在汽车安全问题中是最需要关注的问题。 预防碰撞技术是汽车设计者一直在投入力量进行研究的技术。如在车辆行驶的全程都开启视频记录是不可行的, 这对车辆存储有极高的要求, 也不经济。 而在碰撞发生之后才开始记录, 无法满足碰撞前就开始记录碰撞过程的需求。
如何提前给用户提醒预防, 以及事前打开摄像头并准确记录整个过程。 一方面提醒用户预防碰撞的发生, 另一方面万一发生了碰撞事故, 也可以准确分析出事故发生的原因。
为此, 提出了一种车辆碰撞预警和碰撞前打开摄像头记录发生过程的方法, 能够在提供碰撞提醒的同时前瞻性地记录碰撞发生过程的视频, 碰撞发生后保存视频数据并上传服务器端。 这样, 在碰撞前预先开启摄像头进行视频拍摄, 提前记录过程完整的视频, 同时提供碰撞预警信息给车辆进行碰撞预防, 是切实可行的。
2 系统组成
2.1 功能模块划分
系统分为6个功能模块, 包括: ①用于检测本车与前车距离的雷达; ②距离过近判断单元; ③用于进行预警的提示单元; ④用于执行视频拍摄的执行单元; ⑤用于存储视频信息的数据存储单元; ⑥用于上传数据的5G无线数据通信单元。
1) 测距雷达, 检测与前车的距离作为系统的信号输入。
2) 距离过近判断, 系统中存储着设定的距离阈值, 当测距小于该阈值时, 给出信号用于预警, 同时给出信号用于启动拍摄。
3) 预警提示, 在收到距离过近信号时, 通过语音、 振动、 文字等方式, 提示用户 (驾驶员) 与前车距离过近,需要减速预防。
4) 视频拍摄, 拍摄设定时间内的完整视频, 记录相应状态, 供分析、 还原事故时使用。
5) 数据存储, 本地存储拍摄的视频, 在存储数据量达到设定值时, 启动数据上传, 把本地数据上传到服务器端。
6) 5G通信, 提供数据上传通道。
2.2 系统组成原理
系统组成原理如图1所示。

图1 系统组成原理图
系统的功能模块中, 雷达测距单元、 提示单元和视频拍摄装置分别通过CAN总线与整车ECU连接, 接入整车网络。
1) 雷达测距后的距离信息, 通过CAN网络, 作为输入信号传送给距离过近判断单元, 当判断为距离过近状态时, 将产生距离过近信号, 并把信号回送到CAN网络, 给到预警单元节点和拍摄控制节点接收。
2) 预警单元接收到距离过近信号, 形成驾驶员能感知的警示信号, 包括语音提示信号、 座椅振动提示信号、 屏幕文字警示信号等, 发送到整车相应的ECU, 对驾驶员进行跟车距离过近警示。
3) 拍摄控制单元接收到距离过近信号, 启动视频拍摄功能, 依据设定的拍摄参数 (拍摄时长、 拍摄角度、 摄像头编号等) 进行视频拍摄。
4) 视频拍摄单元拍摄视频数据信息, 存储到本地数据存储单元中。 存储单元控制器检测存储容量使用信息。 当已用容量过大, 剩余容量过小时, 启动数据上传功能, 把本地数据上传到云端服务器, 以清理出本地存储容量给拍摄单元使用。
5) 数据上传时, 使用5G通信模块进行无线数据通信。
3 系统运行流程
3.1 运行步骤
系统运行包含以下步骤。
1) 信号输入, 距离检测单元检测行车距离, 通过CAN总线传给整车ECU。
2) 距离过近判断单元, 把距离信号输入与设定值进行比较。
3) 对比较结果进行判断, 如果雷达测距小于或等于设定距离则输出过近距离提示信号, 距离过近信号回传送到CAN总线, 发送给预警提示单元和视频拍摄单元进行接收;如果雷达测距大于设定的距离, 则不进行操作。
4) 预警提示单元接收到距离过近信号, 形成预警信息, 给驾驶员进行预警提示。
5) 视频拍摄单元接收到距离过近信号, 输出控制信号给视频拍摄装置启动视频拍摄, 并启动拍摄计时。
6) 拍摄计时与设定值比较, 判断拍摄时长是否达到设定值。
7) 视频拍摄, 并把拍摄产生的数据进行存储。
8) 当数据存储容量到达设定的阈值时, 产生中断触发5G无线通信单元上传所拍摄的视频信息到服务器端。
9) 拍摄时长到达设定值, 停止拍摄。
在系统启动运行时, 需判断整车ECU中是否已设定过近距离值、 视频拍摄持续时间长度, 这两个值作为2) 和6)判断参数, 这两个参数只需设定一次, 可以在ECU中修改。
3.2 软件流程
系统运行中, 有4个子流程, 分别为: 启动预警提示流程、 启动视频拍摄流程、 数据上传流程、 拍摄停止流程。
启动预警提示流程和启动拍摄视频流程, 均以判断距离过近为控制基础; 数据上传流程以本地数据存储剩余容量比例为触发信号, 停止拍摄以设定的拍摄时长为停止信号。 系统运行流程如图2所示。
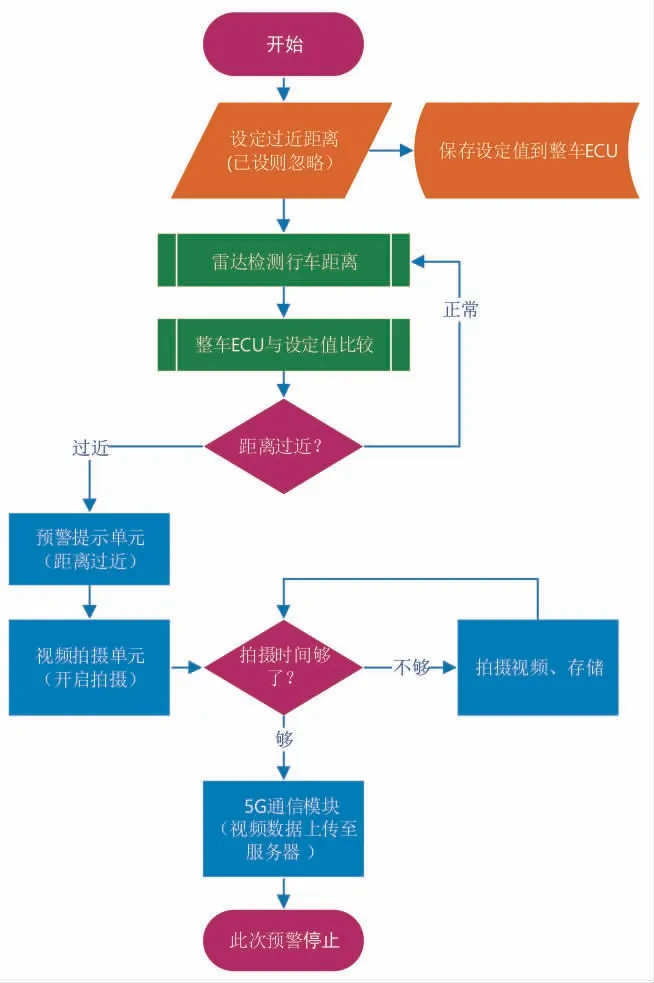
图2 系统运行流程图
1) 过近距离判断: 距离检测雷达周期性地输入距离给到距离过近判断单元, 判断单元将该输入值与系统中存储的距离阈值进行比较; 当测距小于该阈值时, 形成距离过近信号值, 用于预警提示和启动拍摄。
2) 预警提示: 在收到距离过近信号后, 形成预警提示信号。 系统将预警提示信号发送给执行部件, 生成驾驶员感知的警示信号, 以语音提示、 座椅振动、 屏幕文字警示等方式给出预警提示, 对驾驶员进行跟车距离过近警示。
3) 视频拍摄: 在收到距离过近信号后, 视频拍摄单元形成控制信号, 启动视频拍摄装置进行视频拍摄; 开启拍摄计时定时器, 按设定时长、 角度、 方向进行拍摄。
4) 数据上传: 本地数据存储剩余容量到达设定值时(以比例计算), 表明存储空间不足, 需要腾出存储空间以支持视频拍摄数据信息存储。 利用中断方式, 触发5G无线通信单元上传所拍摄的视频信息到服务器端, 并清空已上传的视频信息存储空间, 供后续拍摄存储使用。
4 应用
车辆碰撞预警和碰撞前预先打开摄像头记录发生过程视频的方法, 可以达到以下几个应用目的。
1) 在碰撞前发出预警提示, 让驾驶员可以从容规避车辆碰撞风险。
2) 在车距过近时预先开启视频拍摄, 记录碰撞前至碰撞后一段时间的发展运行过程, 为事故分析和原因查找定位提供合法可信的依据。
3) 采用5G通信技术, 把本地存储的视频记录数据上传服务器, 可以切实降低车机本地存储空间需求, 从而降低用户设备成本, 可有效解决全程拍摄成本高、 无法推广使用的现实难题。
在实际应用时, 拍摄装置搭配多个雷达检测监控, 配置多个方位摄像头更为实用, 效果更佳。 现在市场上的全景摄像头, 加上前瞻性视频拍摄和车辆碰撞预警方法, 综合对车辆其它ECU进行适当改造, 就可以实现文中所述的效果。
猜你喜欢
散文(2022年2期)2022-04-01
意林原创版(2021年7期)2021-08-03
思维与智慧·上半月(2018年11期)2018-11-30
特别文摘(2017年8期)2017-04-19
少儿科学周刊·儿童版(2016年1期)2016-03-14
农家科技(2016年1期)2016-03-03
科技与企业(2015年18期)2015-10-21
环球时报(2014-08-02)2014-08-02
中国对外贸易(2009年7期)2009-08-14
恋爱婚姻家庭·养生版(2009年4期)2009-07-10
