基于三维激光扫描的铁路罐车点云优化处理方法
2022-07-05 08:12张志鹏邵学君
应用光学 2022年3期
张志鹏,邵学君,庞 庆
(中国铁道科学研究院集团有限公司,北京 100081)
引言
铁路罐车作为我国大宗散装液体货物的主要运输工具,是国家重点管理的计量器具,被列入国家《实施强制管理的计量器具目录》[1-2]。随着铁路罐车应用需求和范围不断扩大,对铁路罐车相关计算测量的精度和效率的要求不断提高,国内外专家学者开展了相关的研究,致力于探索一种铁路罐车新型测量技术[3]。随着三维激光扫描技术的诞生,其作为一种新型测量技术,具有测量速度快、精度高、便捷性好、海量数据等特点,被广泛研究应用[4-6],但也存在扫描后海量点云难以实现高效处理的难点。结合三维激光扫描技术的发展和铁路罐车的应用需求,三维激光扫描铁路罐车技术应用而生。
1 现象问题
三维激光扫描铁路罐车,首先,以铁路罐车为扫描对象,将三维激光扫描仪放置在铁路罐车内,调整扫描状态[7],设置参数,采集获取海量高准确度的三维数据即点云,预设扫描效果,满足要求后,将海量点云数据导入点云处理软件中进行处理,包括点云配准、去杂、平滑、合并、修补等一系列处理[8-10]。将处理后的点云进行建立模型,为了达到较好的显示效果会对模型进行精简和渲染,最终形成由海量点云组成的铁路罐车数据模型,支撑铁路罐车相关精准高效的计算研究。三维激光扫描铁路罐车技术流程如图1所示。

图1 扫描流程图Fig.1 Flow chart of scanning
三维激光扫描后获取的铁路罐车点云效果千差万别,图2所示为扫描效果良好的铁路罐车点云,但是在应用过程中,扫描效果会受到来自扫描仪本身以及外界条件的影响[11]。扫描仪本身的影响包括扫描设备物理特性、扫描入射角、机械结构影响等[12-14]。外界条件的影响包括人员操作、扫描环境、罐体附件、罐体内部残留物、罐壁不同材质等。采集到的初始点云数据往往带有许多小振幅噪点和高离群噪点[15-17],这些噪点不属于被扫描对象的真实部分,重建后的模型粗糙凌乱。如图3所示,如不进行优化处理将产生偏差较大甚至错误的模型[18],导致依据模型得到的计算结果不准确甚至错误,且处理过程耗时较长,直接影响模型的应用[19]。海量点云去噪和建模优化是一项非常复杂且耗时的工作。基于以上问题,提出了基于三维激光扫描的铁路罐车点云优化处理方法。

图2 扫描效果良好的点云图Fig.2 Point cloud image with good scanning effect
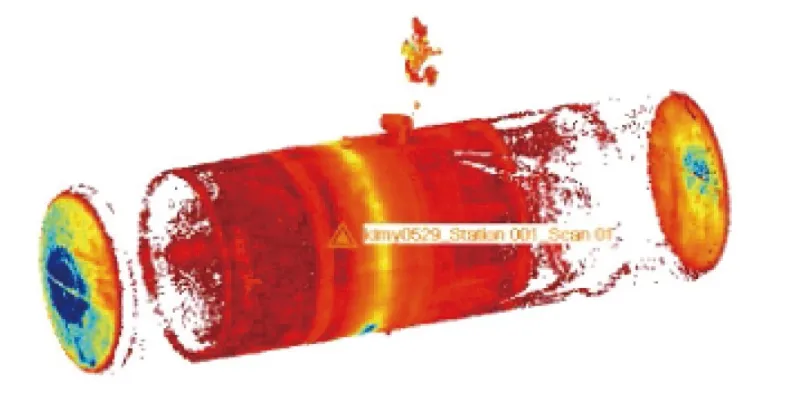
图3 杂乱的点云Fig.3 Point cloud in messy state
2 点云优化处理方法
经过大量的研究和试验,设计了sp-H点云预处理和Eti-G建模优化方法。sp-H点云预处理可有效实现噪点的去除和空洞的修补,Eti-G建模优化可提升建模运行速度和效率。通过sp-H点云预处理和Eti-G建模优化,实现基于三维激光扫描的铁路罐车点云优化处理。
2.1 sp-H点云预处理
三维激光扫描是基于螺旋线方式完成的,而罐体的内表面是平滑连续的,所以位于一条扫描螺旋线上的任何相邻的若干个点云数据{1,2,3,4,5,6,7,…}之间都应有较强的顺序性和一致性。基于此,将点云处理为展开式点云,由于铁路罐车罐体为规则的圆柱体筒体结构,通过捕捉罐体轴心线L(x,y,z),即以轴心线为中心、以罐体周长D1为展开长度进行点云转换。展开的点云,由于其“厚度”不均,需要再次转换。同样以轴心线为中心,以罐体半径r得到的罐体周长为展开长度。同时,基于点云的扫描效果以及罐体内宿与外寄的噪点密度即点云“厚度”确定以二乘法中心平面为中心,上下设置一定高度阙值h,得到内外半径r+h和r-h。以该内外半径得到的两周长D2和D3为上下点云面的展开长度进行点云转换。如图4所示。

图4 罐体噪点模型Fig.4 Model of tank noise
在以上操作过程中,通过设置点云“厚度”阙值h,首先将大于阙值的脱离点云即粗大噪点滤掉,即去除噪点。同时,通过计算点云密度,设置不同区域点云“厚度”阙值,对于封头等远距离、小入射角的区域可以设置大阙值hd,甚至可接收全点云数据即点云不进行“抽稀”。对于罐体筒体中间部位点云可设置小阙值hx,进行点云抽稀甚至点云均布操作。如果某些局部区域如远距离、小入射角封头部位在展开点云平面投影时,点云密度依然不能满足后期计算要求,可在投影平面上通过插值的方式补入新的点云数据,直到满足点云密度要求,该部分点云设有标识识别集合{1c,2c,3c,4c,5c,6c,7c,…}。经过初步去噪后的点云厚度变“薄”,更接近罐体真实结构。然后将展开式点云进行投影计算,形成投影式点云,如图5所示。
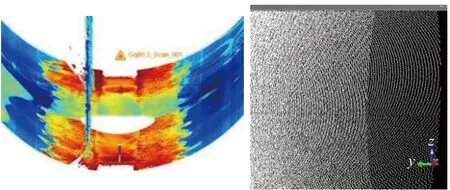
图5 展开点云Fig.5 Expansion diagram of point cloud
将所有点云投影到展开的平面上,展开式投影点云存在原有罐体上点云{1,2,3,4,5,6,7,…}和非罐体上点云{1c,2c,3c,4c,5c,6c,7c,…}两种投影点云,由于非罐体上点云会插在原有点云之间,形成增加密度的投影点云,填补点云空位,即填补了点云空洞。通过极坐标变换,将展开点云生成模型,罐体原有点云复位,新加入的点云通过点集合的标识与原有点云建立相互坐标关系,完成点云的修补。按照区域链的划分,重复以上步骤实现去噪和缺失点云的修补,形成较干净较薄的接近真实面体的优化后的铁路罐车点云。
2.2 Eti-G建模优化
点云进行优化处理后,需要进行三维模型重建,通常采用均匀网格法。均匀网格法克服了均值和样条曲线的一些缺点,但由于网格大小相同,缺乏对罐体复杂形状捕捉的灵活性,并且网格划分过细容易产生大量的空栅格,造成计算运行时间和空间的浪费。
基于上述问题,设计了基于铁路罐车点云的Eti-G建模优化,如图6所示,该方法根据三角形圆周角的性质进行判断:若sin(C+D)>0,则点D在圆外,不进行优化,见图6(a);若sin(C+D)<0,则点D在圆内,必须进行优化,见图6(b);若sin(C+D)=0,则点D在圆上,可以不做优化,见图6(c)。为了降低余弦定理计算边的长度、反三角函数对建模速度的影响以及产生的误差,采用矢量运算。

图6 三角形优化Fig.6 Diagram of triangle optimization
设点A的坐标为(x1,y1),点B的坐标(x2,y2),点C的坐标(x3,y3),点D的坐标(x4,y4),根据矢量点积的计算公式:

sin2C+cos2C=1sin2D+cos2D=1
再由公式,可得:
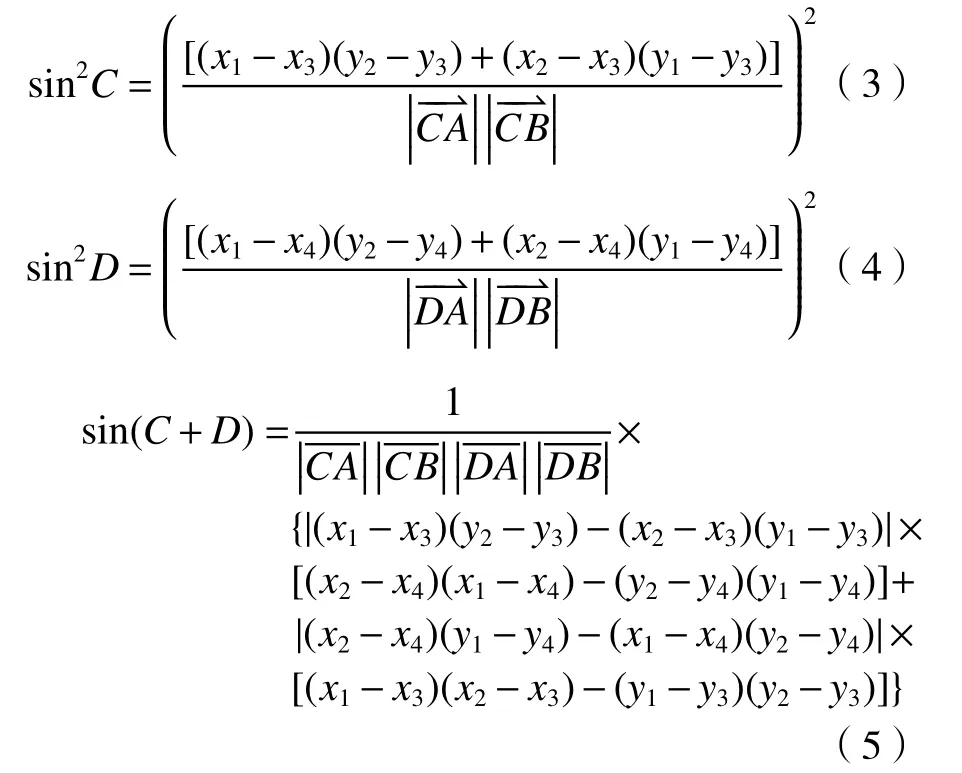
对上述计算进行简化,有:

将以上算法用于建模优化后,可提升模型重建运行速度和效率。通过该方法获得的三角网可直观地将罐体模型表示出来,图7为罐体点云数据生成的三角网局部放大视图。

图7 罐体点云数据生成的三角网局部放大Fig.7 Local amplification diagram of triangulation networks generated by point cloud data of tank
2.3 模型应用
基于铁路罐车重建后的三维模型进行铁路罐车容积计算应用,首先将罐体水平均匀切片,用垂直于z1轴的等距平面对点云数据分段,如图8所示,有2个水平面zi-1和zi。
图8 梯形台上的点Fig.8 Diagram of points on trapezoidal platform
将平面点集中的所有点向平面投影,形成点集PJ={pj|j=1, m},其中点pj的坐标为(xtj,ytj,zi)。对每个集合获取其重心cv,将这些重心依次排列得到序列CV中的每个点cv的连线形成梯形台在平面zi上的外轮廓,如图9所示。连接序列CV中的点c1、c2、c3,得到三角型ΔT1;连接点c1、c3、c4,得到三角型ΔT2;同理,连接点c1,cj+1,cj+2,得到三角型ΔTj。

图9 平面的三角建模Fig.9 Diagram of triangular modeling of plane
对三角型ΔTj,按Hellen公式计算得到其面积ΔSj为

式中:a、b、c分别为ΔTj的3条边长; p=(a+b+c)/2。
将每个三角型的面积累积获取梯形台的底面积Si:

如果梯形台的厚度Δh足够薄,则其体积Vi为

式中:Si为第i个梯形台的上底面积;Si-1为第i个梯形台的下底面积。则罐体的总容积V为

3 试验验证
试验验证选取具有代表性的G60k型号铁路罐车作为试验对象,以精度较高的量传法计算结果作为试验标准进行分析验证。量传法是按照国家计量标准《罐车容积检定装置》开展的测量方法,测量结果的相对扩展不确定度为2×10-3。通过三维激光扫描法扫描G60k型号铁路罐车,采集获取海量扫描点云数据,对扫描点云数据分别进行处理,然后将未采用sp-H点云预处理、Eti-G建模优化得到的计算结果和采用点云优化处理方法的计算结果,分别与精度较高的量传法计算结果进行比较。未采用sp-H点云预处理、Eti-G建模优化方法采用通用商用软件处理。点云优化处理方法采用1/8分辨率、4倍质量、10 m点距参数,h取6 mm。点云处理后进行建模,模型对比图如图10所示,可见,与图10(a)相比,图10(b)噪点和空洞较少,模型可视化和通顺性好,较好实现后期计算。

图10 建模对比图Fig.10 Comparison diagrams of modeling
为了便于分析比较,选取G60k型号铁路罐车1 400 mm到1 650 mm之间6个液位高度下的容积测量结果进行比较,如表1所示。
表1 试验结果Table 1 Test results
试验结果表明:采用点云优化处理方法三维激光扫描法的测量结果,更接近于精度较高的量传法测量结果,测量结果准确性好,点云处理用时短,效率高;未采用点云优化处理方法的三维激光扫描法测量结果准确性低,点云处理用时长,效率低;相比之下,采用点云优化处理方法的三维激光扫描法更具优越性。将重复性数据用于测量不确定度评定,测量结果的相对扩展不确定度为2.4×10-3,k=2。
4 结论
三维激光扫描点云优化处理方法优化了点云去噪、空洞修补、高效快速模型重建问题,降低了对初始扫描点云质量的要求,改善了三维激光扫描对环境的依赖性,大大缩短了点云处理时间,提高了运算效率和测量准确度,实现了点云处理过程快速、准确、便捷、自动化,为三维激光扫描技术研究应用提供了一定的借鉴。
猜你喜欢
中国特种设备安全(2022年8期)2022-11-20
天津建设科技(2022年1期)2022-03-07
科技创新与品牌(2020年7期)2020-07-29
影像视觉(2020年4期)2020-05-09
影像视觉(2019年3期)2019-04-20
专用汽车(2018年10期)2018-11-02
数码摄影(2016年1期)2016-02-27
中国新闻周刊(2015年35期)2015-10-08
数码摄影(2009年7期)2009-09-28