
PCB平面绕组力矩电机闭环反馈式驱动系统设计
2022-07-09 01:41张奇王劲松屈阿雪宋贺马泽同
科学技术与工程 2022年15期
张奇, 王劲松*, 屈阿雪, 宋贺, 马泽同
(1.长春理工大学光电工程学院, 光电工程国家级实验教学示范中心, 长春 130012; 2.长春理工大学光电工程学院, 光电测控与光信息传输技术教育部重点实验室, 长春 130012)
由柔性板PCB(printed circuit board)构成的直流无刷力矩电机最早出现在20世纪中期,其与传统电机有着相同的结构特点,都是由绕组定子和永磁体转子构成,与直流无刷力矩电机不同的是PCB绕组板取代了线圈绕组,使得电机的结构更加小巧灵活,同时还具备结构简单、体积小、质量轻等优点以及能够低速运行且稳定性高的优势[1-2]。由上述的这些性能可使PCB电机能广泛应用于光学系统的光纤干涉测量系统中[3]。利用光学干涉技术测量长度、角度等物理量时, 需要使用旋转式光学延迟线得到不同光程的光束, 使其与参考光发生干涉来获得测量值。如果光学延迟线在旋转过程中晃动, 光束就无法原路返回, 那么就无法相互干渉, 导致测量失败。因此需要设计一种高稳定性、鲁棒性强的电机驱动系统,实现对光学延迟线部分平稳和精确的控制。
在电机控制领域,工程上常用传统比例积分微分(proportion integral derivative, PID)控制算法,这种传统的控制方法虽然容易实现,但却始终存在转速超调和快速跟踪方面的问题,当系统处在复杂的扰动环境下时,其转速跟踪的精度偏低并且系统平稳性方面较差,因此制约了电机驱动系统性能的提升[4]。现代控制领域中应用于电机调速的多种控制方法如模糊控制、模型预测控制、滑膜控制等或需要被控对象有精确数学模型,或在模型失配和外界扰动下控制性能恶化[5]。自抗扰控制(active disturbance rejection control,ADRC)方法不依赖被控对象精确数学模型,具备扰动估计和补偿的能力,控制效果较好且计算量不大,有利于电机驱动系统性能的提升。
自抗扰控制算法由于其具有不依赖于被控对象有精确的数学模型和抗扰动能力强等优点,目前其广泛应用于现代工业现场。陈路明等[6 ]运用自抗扰控制方法,对永磁同步轮毂电机的转速系统模型进行了分析,结果表明自抗扰控制在提升永磁同步轮毂电机转速响应快速性和减小转速超调方面具有独特优势。张越杰等[7 ]提出一种扰动分离自抗扰控制算法,并用于提高光电稳定平台伺服系统的抗扰动能力,最后验证了有效地提高了光电稳定平台的稳态精度。白杰等[8 ]利用线性自抗扰控制技术设计了设定点控制器,并将控制器进行了参数整定,最终结果表明采用线性自抗扰控制技术的控制器可以在两种不同的飞行条件下保持优异的性能。本文中设计的电机驱动系统以基于自抗扰控制的PCB平面绕组力矩电机的矢量控制模型为基础,采用自抗扰控制器取代速度环,PI控制器作为电流环,增强了系统的抗扰动能力,提高了控制性能。通过仿真和实验表明,相比于传统PI速度环的电机驱动系统,该系统具有更好的控制效果,验证了系统的稳定性和可行性[9-10]。
1 驱动系统的整体构成
依托的生物测量仪研究要求产品小型化、轻量化、测量精度高, 基于这些要求, 将PCB平面绕组力矩电机应用在生物测量仪中光学延迟线的控制。在光学延迟线系统中, 要获得完整的光脉冲信号, 需要对发生相对位移或相移的被测信号进行采样[11], 其中测量脉冲信号与参考脉冲信号的相对时间延迟是通过光学延迟线的往复运动实现的。PCB平面绕组力矩电机带动光学延迟线旋转以改变激光的光程, 当外部激光器发出测量光束水平入射到旋转的光学延迟线上, 经其折射后到达光源调整部分的反射镜, 最后原路反射回来与参考光束发生干涉。基本原理如图1所示。
PCB平面绕组力矩电机驱动系统由STM32主控电路、PCB平面绕组力矩电机、三相全桥PWM(pulse width modulation)驱动电路、反馈调节电路、上位机等组成。由STM32芯片向IR2101s 和MOS(metal oxide semiconductor)管构成的三相驱动电路中输入六路PWM 脉冲序列,控制相应驱动电路中的MOS管通断使电机转动。反馈调节电路输出检测到的电机转子位置信息,由STM32处理得到当前转速信息,并在PC端通过上位机进行实时显示。图2为系统整体构成图。

图1 系统原理示意图Fig.1 System schematic diagram
为了提高电机运转时的平稳性,使用ADRC算法和PI调节进行速度控制和电流控制,通过霍尔磁性位置传感器采集到的位置信息计算得到转速大小,与速度设定值nref做差得到速度误差量作为ADRC控制器的反馈输入,电流采样电路经过ADC(analog to digital converter)采样电机的Iu、Iv两相电流值,根据基尔霍夫电流定律可以求出Iw相电流值,根据文献[12],三相电流经Clarke变换和Park变换可以转化为d-q轴上的id和iq作为电流环的反馈输入,其中id为励磁电流,iq为转矩电流,令idref=0,iqref为ADRC控制器输出值,对id和iq进行PI(proportion integral)调节后输出Ud和Uq的值经过Park逆变换和SVPWM模块后输出六路PWM脉冲序列从而达到电机转速闭环反馈控制的目的。图3为基于ADRC的PCB电机驱动系统矢量控制框图。

图2 系统整体构成图Fig.2 System overall structure diagram
2 硬件系统设计
2.1 三相全桥PWM驱动电路
PCB平面绕组力矩电机的定子为PCB绕组板,如图4所示,该PCB绕组板前三层为绕组线圈层,每层有12个绕组线圈,分为4组,每层线圈同相之间为串联,同相不同层之间为并联,这样也就组成了A、B、C三相。所以在驱动时需要6路PWM脉冲和3路霍尔磁性位置传感器的信号确保电机能够平稳的运行。
三相全桥驱动电路选用型号为IRF2807PBF的MOSFET。IRF2807PBF是一个单N沟道功率MOSFET,采用先进的处理方法达到一个极低的导通电阻约为13 mΩ,最大的输出电压可达到75 V,最大的输出电流可达到82 A,而且IRF2807PBF具有快开关速度和坚固耐用设计,有极高的效率和可靠性[13]。图5为IRF2807PBF的内部结构原理图。

图3 基于ADRC的PCB电机驱动系统矢量控制框图Fig.3 Vector control block diagram of PCB motor drive system based on ADRC

图4 PCB绕组实物图Fig.4 PCB winding physical map

图5 IRF2807PBF的原理图Fig.5 Schematic diagram of IRF2807PBF
在驱动电路中,MOS管来回多次关断,可能会击穿功率管的氧化层,造成永久破坏。为保护 MOS 管,在电路设计时每个IRF2807PBF MOS管的栅极都串联了一个电阻(图6),将源极与漏极之间并联了起来,这样不仅能保护MOS管,还能够迅速恢复二极管实现双向调速。
MOS的驱动芯片选用IR2101s控制芯片。在驱动电路中使用三个IR2101s(图6),它们分别对应控制电机的三相。该芯片用于IGBT(insulated gate bipolar transistor)和MOSFET的600 V高边和低边栅极驱动器IC。在本驱动系统中用于连接驱动半桥同一臂上的两个MOSFET。IR2101s利用SOIC封装,采用了高集成度的电平转换工艺,其逻辑输入兼容3.3、5、15 V。采用悬架通道技术实现自举操作,可以在600 V以上进行工作[14]。
2.2 反馈调节电路
2.2.1 调节原理
图7为速度反馈调节原理图。该控制系统通过霍尔磁性位置传感器检测电机的实时位置信号并将其传入主控芯片,经过计算得到当前电机的速率。根据读取到的转速设定值和反馈的实际速度值计算得到速度误差的控制量,经过ADRC控制器、PI控制器和SVPWM模块,然后通过控制MOS管的开关顺序和通断时间来改变PCB定子上各个绕组的电流大小,从而在空间中产生近似于圆形的旋转磁场,进而控制三相全桥驱动电路,来及时调整电机的转速,实现电机运转时的速度反馈控制[15-16]。
在实际应用中,电机可能会受到负载或一些外界环境变化的影响,导致转速发生波动。为了保持电机运行时的稳定性,本文中使用ADRC控制算法对电机进行实时速度补偿。
自抗扰控制技术(active disturbance rejection control,ADRC)最早是由中科院的韩京清教授提出的[17]。这个算法既包含PID(proportion integral derivative)算法的精髓,又将抗干扰技术融入其中,使改进后的算法在工程实践中得到了极为广泛的应用。ADRC控制器包括跟踪微分器TD(tracking differentiator)、扩张状态观测器ESO(extended state observer)和非线性状态误差反馈NLSEF(nonlinear state error feedback)。TD是将输入信号进行处理得到一个微分信号和一个平滑信号,并对这两个信号进

图6 驱动电路图Fig.6 Drive circuit diagram

v0为转速设定值;vx为电机的实际转速;Δv为转速偏差图7 反馈调节原理图Fig.7 Schematic diagram of feedback regulation
行跟踪,这样是为了防止输入信号突变从而减小高频信号,保证了系统快速性的同时又能减小超调。离散形式的非线性微分跟踪器为
(1)
式(1)中:h为采样周期;v为输入信号;r1为v的跟踪信号;r2为v的近似微分;v(k)为第k时刻的输入信号;δ为决定跟踪快慢的参数;fst()为最速控制综合函数,具体的表达式为
(2)
(3)

ESO堪称ADRC的灵魂,它的输入为被控对象的输出及其控制输入、输出分别是被控对象输出的估计值及其一、二阶导数。它的主要作用是通过观测系统内部扰动,在反馈中给予补偿,以此来消除扰动。
(4)
式(4)中:y为输出量;z1、z2分别为y的跟踪信号及跟踪信号的微分;z3为不确定干扰的估计状态观测量;β01、β02和β03分别为积分、比例和微分参数;fal()为饱和函数,表示为

(5)
式(5)中:δ为线性段的区间长度。
NLSEF(nonlinear state error feedback)是为了改进PID的缺点而增加的非线性控制律,针对传统PID对误差、误差积分和微分利用线性组合求取误差导致被控系统效率低下的问题,采用非线性组合的方式,提高了系统对于误差的计算和处理效率。其一般表达式为
(6)
常用的离散算法为
u=k0fal(e0,α0,δ)+k1fal(e1,α1,δ)+
k2fal(e2,α2,δ)
(7)
式(7)中:e1=x1-z1,e2=x2-z2;e0为e1的积分,e1为e2的积分。
2.2.2 反馈调节电路构成
反馈模块需要检测转子的实时位置信息以此来进行坐标变换和速度值的计算。与直流无刷力矩电机不同的是,三个霍尔传感器放置在了PCB绕组板的底层,且分别放置在A、B、C线圈中间位置,之间角度为30°[18]。
本系统所选用的SS361RT 霍尔磁性位置传感器灵敏度高,体积小,能够很好地满足需求。为了对霍尔磁性位置传感器输出的信号进行滤波,使用了由电容和电阻构成的滤波电路,如图8所示,霍尔磁性位置传感器输出的3路信号由PA6、PA7、PB0接收并传入到主控芯片,用于检测转子的实时位置信息。结合STM32最小系统和上述的三相全桥驱动电路以及调节电路绘制电路板,图9为驱动系统实物图。

图8 霍尔位置信号处理电路Fig.8 Hall position signal processing circuit
3 系统软件设计
3.1 软件总体结构设计
由图10系统主程序流程图所示,主程序和中断程序构成了系统的主要软件设计。主程序主要完成系统的初始化、判断电机状态、开启中断、向电机输出PWM波等功能。
3.2 中断程序设计
中断程序是整个控制系统的核心,由闭环调速程序和串口通信中断程序构成,其主要完成位置读取、电流采集、ADRC控制和PI电流调节等功能,实现伺服系统的转速闭环控制。

图9 驱动系统实物图Fig.9 Drive system physical map

图10 系统主程序流程图Fig.10 System main program flow chart
3.2.1 闭环调速程序设计
该闭环式调速系统主要由ADRC控制器和电流环两部分构成,ADRC控制器利用ADRC控制算法,电流环采用PI控制,通过霍尔传感器采集到的位置信息计算得到转速大小,利用ADRC控制器使转速跟随给定值变化,控制电机转速稳定,电流环用来调节电机动态性能。图11为闭环调速流程图。
3.2.2 串口通信中断程序设计
UART 串口通信采用中断的方式, 包括发送中断和接收中断, STM32接收上位机发送的给定转速值等命令, 在接收完毕后向上位机反馈所需的转速和转矩等数据, 串口通信中断流程图如图12所示。
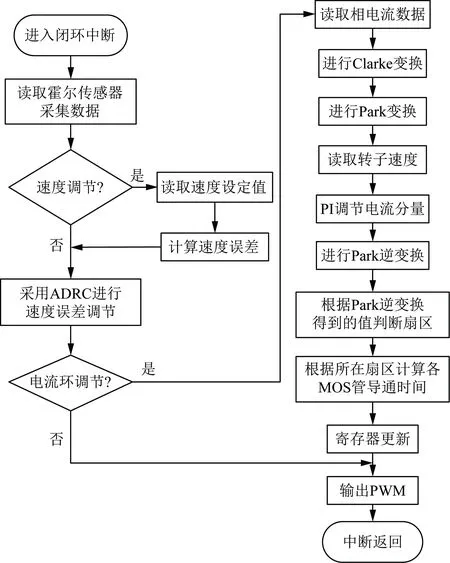
图11 闭环调速流程图Fig.11 Closed loop speed control flow chart

图12 串口通信中断流程图Fig.12 Serial communication interrupt flow chart
4 仿真及实验结果分析
4.1 仿真及结果分析
为了检测PCB电机在不同条件下运转的输出特性, 验证PCB电机闭环反馈式驱动电路控制的稳定性, 在Simulink中以传统PI电机控制模型为基础, 搭建了基于ADRC算法的闭环PCB电机调速系统模型图, 如图13所示。
在电机带载3 N·m的情况下,设定转速为0时从0阶跃到300 r/min,并且当仿真进行到0.1 s时突加2 N·m的负载,分别得到速度环采用ADRC控制算法和传统PI控制算法的电机转速响应特性曲线图、速度曲线局部放大图及转矩变化图,如图14~图17所示。
由图14所示电机转速响应特性曲线图可以看出,采用ADRC控制算法的电机转速的控制效果明显好于PI,由图15所示启动过渡部分放大图可以看出,采用ADRC控制算法时转速由0到300 r/min只用了0.01 s且几乎没有超调,而使用传统PI控制算法时用了0.025 s且出现了385 r/min的转速超调,由此可见,ADRC比传统PI具有更好的稳态特性与动态特性。
由图16所示突加负载部分放大图可以看出,当在0.1 s时突加负载后,使用ADRC控制算法的电机转速仅出现不到2 r/min的波动,而使用传统PI控制的电机转速则出现了9 r/min左右的波动,由此可见,在使用ADRC控制后,驱动系统的抗干扰能力得到了增强。由图17所示的转矩变化图可以看出,在ADRC算法控制下,系统仅用了0.01 s就完成了转矩从0到初始3 N·m的阶跃,并且在0.1 s加负载时,也仅用了0.004 s就达到了5 N·m的稳定状态,而且负载稳定时转矩误差波动在0.1 N·m范围内,而在传统PI控制算法下,系统用了0.03 s就完成转矩从0到初始3 N·m的阶跃,在0.1 s加负载时,用0.02 s达到了5 N·m的稳定状态,在负载稳定时转矩误差波动在0.2 N·m的范围内,由此可见,在使用ADRC控制算法后,驱动系统具有了更好的平稳性,更强的鲁棒性。

图13 基于ADRC的闭环PCB电机调速系统模型图Fig.13 ADRC-based closed-loop PCB motor speed control system model diagram

图14 电机转速响应特性曲线Fig.14 Motor speed response characteristic curve

图15 启动过渡部分放大Fig.15 Start transition part zoom
4.2 实验及结果分析
为了验证使用ADRC控制算法的驱动系统在低速运转时具有更好的稳定性和可靠性,绘制驱动电路板并搭建实验系统,完成对PCB平面绕组力矩电机的驱动实验。实验安排如下:分别对使用ADRC控制算法和传统PI控制算法的PCB平面电机进行实时转速测量,设置目标转速为300 r/min,通过串口通信记录从启动到稳定的电机转速波形,图18为电机带载时的速度响应曲线对比图,图19为速度波动对比图,图20为实验装置图。
通过以上实验结果看出:在使用传统PI控制的反馈系统中,电机约有60 r/min的超调量,电机在匀速转动时速度波动较大,转速波动误差在3 r/min附近,电机运行的平稳性较差。使用ADRC控制算法的反馈驱动系统,电机无超调,并且当电机在匀速转动时转速波动误差约1 r/min,大大改善了电机的运行平稳性,减小了电机运行时的速度波动,鲁棒性更强。

图19 电机转速波动对比图Fig.19 Motor speed fluctuation comparison chart

图20 实验装置图Fig.20 Experimental setup diagram
5 结论
用IRF2807PBF MOS管和IR2101s驱动芯片相结合以STM32为控制芯片设计了一个针对PCB平面绕组力矩电机的驱动系统,并在软件中采用了ADRC控制算法。该系统有效地简化了电机驱动电路硬件设计和软件控制方略。并且通过仿真和实验对比了传统PI控制方法,使转速波动误差从3 r/min提高到了1 r/min,证明了所设计的闭环调速系统的可行性和稳定性,能够保证PCB平面绕组力矩电机在有负载或有外界干扰的情况下平稳运行,同时设计的控制系统也降低了控制的复杂性和成本,这使得PCB平面绕组力矩电机能够广泛应用于低速测量的一些系统中。
猜你喜欢
当代水产(2022年7期)2022-09-20
军民两用技术与产品(2022年3期)2022-06-05
纺织服装周刊(2022年16期)2022-05-11
物流科技(2022年2期)2022-05-07
防爆电机(2022年1期)2022-02-16
中国测试(2018年9期)2018-05-14
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
农机使用与维修(2014年1期)2014-09-23
职业·中旬(2009年12期)2009-06-01
