一种智能井下巡检救助机器人设计与研究
2022-07-14 09:01李荣和关凯元缪顾鑫李振康
电视技术 2022年6期
李荣和,关凯元,缪顾鑫,李振康
(黑龙江科技大学 电气与控制工程学院,黑龙江 哈尔滨 150028)
0 引言
我国是一个产煤和耗煤的大国。煤炭产业是我国经济发展的重要产业之一。煤矿井下的安全和设备完好性,是制约我国煤炭行业发展的主要问题。煤矿井下的工作环境恶劣危险,有许多巷道,可能突发危险情况,而且在大多数救援过程中,矿井还可能发生瓦斯爆炸、坍塌、矿井下迷失等危险问题,会延误救援人员的救援工作[1]。
为此,本文研究一款智能井下巡检机器人。总体作为一个矿井探测救援系统,可以帮助人员深入矿井,能够完成具有一定危险性的救援探索任务,救出被困的矿井工人,减少救援时间,从而降低伤亡人数。
日常巡检时,智能巡检机器人可有效拍摄出巡检环境内各种设备的高清图像,并利用网络将采集到的图像信息实时传输到后台主控制系统,方便工作人员能够通过接收到的视频、图像对巡检设备的运行状态做出有效判断并制定操作计划。当井下发生异常警报时,可以通过机器人发送的信息发现井下的异常情况,救援人员可根据机器人传出的视频和环境建图来排查井下情况。
1 机器人基本结构
基于分层控制的设计理念,本文对巡检救助机器人系统各个功能模块进行分层设计,分为监控层、通信层以及控制层。其中,控制层又分为上位机控制系统和下位机控制系统。各层次功能明确,如图1 所示。
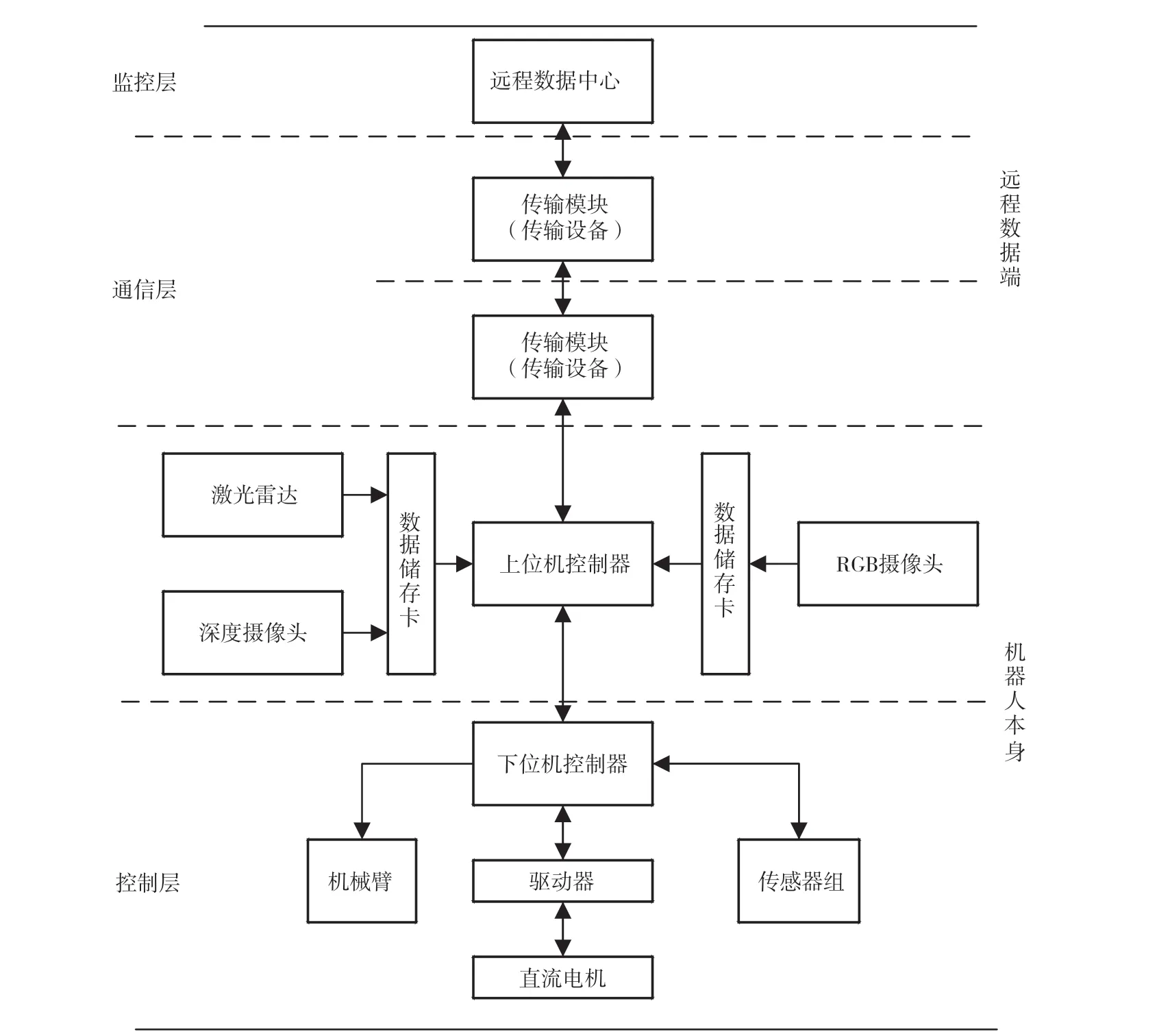
图1 机器人各层各级分布图
1.1 监控层
监控层可以通过计算机远程操作或采用电脑连接机器人后部的显示屏进行代码修改或控制,接受工作人员发出的指令进行工作,在正常状态下可以进行区域自主导航,检查井下设备的工作状态以及巡检地区是否发生异常。监控层可以载入对人或设备的训练模型,然后用卷积层替换整个连接层,并对其进行端到端的训练(一种深度神经网络训练),以便进行目标检测。YOLO 培训分类器使用224×224 张照片,然后使用448×448 张图片进行目标检测;通过巡检设备(激光雷达和深度相机)利用即时定位与地图构建(Simultaneous Localization and Mapping,SLAM)完成建图后,地图信息会被保存为文件。
工作人员可以在可视化工具内加载扫描的点云地图文件,查看地图具体信息,以实现机器人的自主巡航、定点导航的功能;监控层还能够人为地对地图上的区域进行划分,并且选择划分的区域设计为机器人所代表的无障碍点,将记录的好的点在可视化工具中设置为坐标,并对点进行赋值命名从而实现定点导航。
1.2 通信层
考虑到矿井的特殊性,通信层在实际应用中分为三部分。
第一部分是地面控制中心(数据管理中心)。通过设置在地面的数据管理主机,能够对巡检机器人进行远程操控,远程监控煤矿井下的运行设备状态、温度以及传输,实现机器人的大数据管理和数据、图像、视频的传输与处理,机器人运动轨迹远程控制等功能。
第二部分是数据传输。数据传输部分主要依托工业级的网络平台如以太网或总线设置。通过RJ-45 通信端口(一种常用的布线系统中信息插座连接器)就近接入交换机、以太网或总线站等。在机器人的调试过程中,由于不具备真实的矿井情况和以太网等工业级的网络平台,在测试中可用两个通信模块代替。
第三部分是数据终端,用来实现信号覆盖和通信,本部分主要用于与巡检机器人和电脑终端的联系。
1.3 控制层
巡检救助机器人的控制层分为上位机控制系统和下位机控制系统两大部分。两个部分相互独立运行并实现各自的基本功能,通过数据总线的方式进行上下位机数据的交互;Jetson nano 主控作为上位机,类似于人体的大脑结构,需要对采集到的数据量和下位机运行的数据进行数据处理,对处理过后的数据进行实时的定位和建图,并对机器人的运动做出决策[2];最后将控制命令发送给下位机,完成控制运动平台的动作。
STM32 作为下位机控制器起到两个至关重要的作用,即对机器人运动的控制和收集传感器获得的原始数据,将原始数据进行简单的处理后发送给上位机,根据上位机对数据处理后发送的指令,从而控制机器人的运动。激光雷达和深度相机安装在机器人的前端和上端,根据机器人的移动得到距离信息和位移记录。
2 系统软硬件设计
2.1 系统硬件设计
井下救助机器人搭载了RPLIDAR A3 激光测距传感器、深度相机、Jetson nano 主控等设备。操作系统采用基于Linux 系统的机器人软件控制平台(Robot Operating System,ROS)。ROS 系统可以提供一系列程序库和工具以帮助软件开发者创建机器人应用软件,有硬件抽象、设备驱动、函数库、可视化工具等诸多功能。本文采用ROS 系统的原因是ROS 的通信框架资源生态丰富易于操作使用,并且支持对机器人采用分层设计的控制方式[3]。
2.1.1 激光雷达与深度相机融合建图
机器人要完成自主避障和导航,最主要的是解决SLAM 建图的问题。最基本的方法是,借助多源传感器,使机器人拥有一定的感知周围环境深度信息的能力。本文通过激光雷达和深度相机来实现这种能力,因此本文的硬件部分只对激光雷达和深度相机进行介绍。
通过激光雷达可实现对周围环境的360 度全方位扫描测距检测,从而获得周围环境的轮廓图,使机器人可以在更加旷阔的环境中进行地图构建和自主定位。
深度相机用于视觉的图像采集,可提高机器人建图的质量,能够采集场景的三维信息并配合激光雷达的点云识别实现对环境的感知。采用深度相机配合雷达的方法,能够加快对环境的构建和视觉的调试效果。效果如图2 所示。

图2 激光雷达与深度相机融合建图
2.1.2 机械臂
巡检救助机器人的机械臂采用的是四自由度机械臂并配置了柔性二指爪,使用数字信号来进行控制。控制信号进入下位机控制器,可获得直流偏置电压,将直流偏置电压与电位器的电压比较,获得电压差之后输出。电压差的正负输出到舵机,决定舵机的正反转。并且,利用机械臂动力学模型并进行了线性化处理,以降低算法复杂度、保证实时性。
2.2 系统的软件设计
2.2.1 滤波算法
要完成机器人的自主导航和避障,首先要解决SLAM 建图的问题。本文前部分已经简述了硬件原理部分。SLAM 是一个庞大的理论体系,这里只对其中应用到的一种重要的滤波算法进行简单的叙述,便于读者理解。
机器人采用了一种RBPF 粒子滤波算法,使机器人按照先进行定位之后再进行建图的顺序工作。这样做的目的是将定位和建图过程分离。在实时接收激光雷达的建图数据后,与最初始的模型图进行匹配。其中一个雷达在匹配到位姿之后,会将当前帧的激光插入图中,当图中的位姿没有变化或变化不大时就会将其除去。后端部分采用界定法,对地图搜索后进行加速,这样会构成一个回环检测,可以更好地检测出深度相机是否重复经过一个地方,来消除匹配误差[4]。
2.2.2 自主路径规划的实现
路径规划是机器人导航最基本的环节。在有障碍物的工作环境中,机器人需要找到一条从起点到终点的适当的运动路径,使机器人在运动过程中能安全、无接触地绕过所有障碍物。根据对环境信息的掌握程度不同,机器人路径规划可分为全局路径规划和局部路径规划两种。
全局路径规划是通过计算出机器人到目标位姿的路线,来利用全局代价地图进行全局的路径规划[5]。本设计采用A*算法最短路径的算法来实现,通过引入启发函数,使整体性能相比于Dijkstra(迪杰斯特拉算法)有了较大改善。
Dijkstra 算法的实质是广度优先搜索,是一种发散式的搜索,所以空间复杂度和时间复杂度都比较高,计算量非常大。对路径上的当前点,A*算法不但记录其到源点的代价,还计算当前点到目标点的期望代价,是一种启发式算法。相比之下,A*算法消耗时间较少,可以使机器人在导航过程中保持连续运动。其数字描述可表现为:

式中:f(n)为从初始节点n到目标节点所消耗的代价值,g(n)为初始节点到任意节点n耗费的真实的代价值,h(n)为机器人从节点n移动到目标节点所消耗的代价值的启发函数[6]。
预估移动代价h(n)采用曼哈顿距离表示为:

式中:xd和xn分别为目标点和节点n的横坐标,yd和yn分别为目标点和节点n的纵坐标。
通过全局路径规划得到一条大致可行的路线,还要使机器人获得目的地信息,此时要调用局部路径规划,利用路线信息及costmap 的信息来规划出具体行动策略。每当move_base(机器人路径规划的中心枢纽)在处于规划状态,就调用DWA 算法在上位机主控中发出一条最佳的速度指令,发送给机器人下位机执行并驱动。局部规划的路径会靠近全局规划的路径,并结合实际情况,对局部路径进行调整。
3 实 验
巡检过程中,机器人一般会遇到两种情况。
一种是静态障碍物(如图3 上两个图、图4 左图的情况)。当遇到静态障碍物时,开始规划出路径。机器人合理避让并有效的避开了第一个障碍物,路径符合时间最优,最终到达的目标点的姿态也吻合发布的目标点。
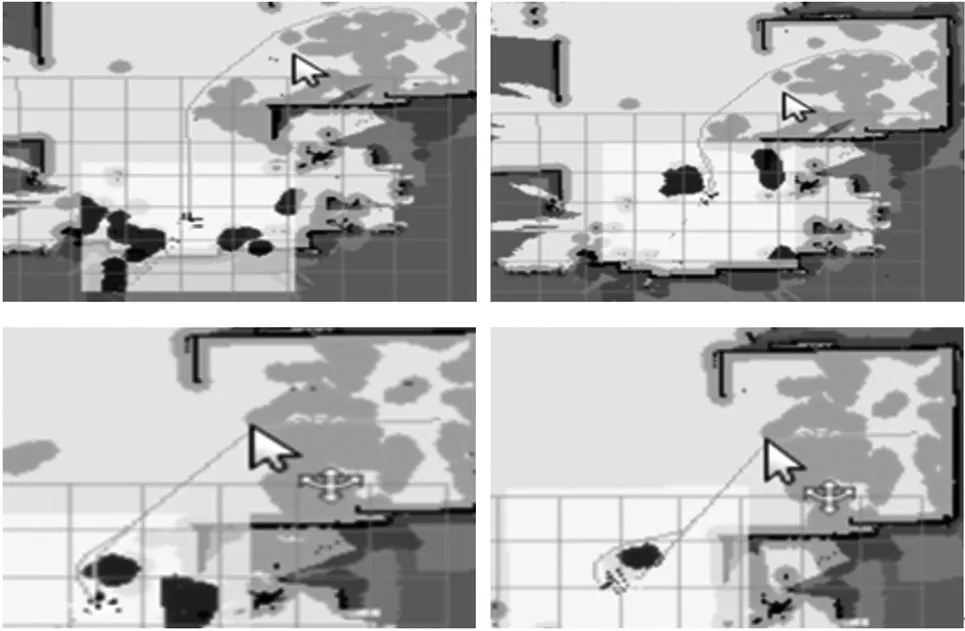
图3 机器人定点规划
另一种是动态障碍物(如图3 下两个图、图4右图的情况)。当机器人所处环境对比之前建图的图像发生了变化或有障碍物突然出现在所规划的路线前方时,通过深度相机识别障碍物的距离信息,及时地更新形成新的建图模型图层。机器人将根据新的模型图层重新规划局部路线来绕开障碍物并继续向着目标点运动,这样就实现了自主避障的功能。

图4 环境模拟
4 结语
本文通过对深度相机和激光雷达等硬件设备的搭建以及对算法的优化,得到机器人实时定位与建图;利用ROS 操作系统对机器人进行编程控制最终进行调试,使得机器人实现同时定位与建图以及自主导航的功能。
实验结果表明,采用本思路设计的巡检机器人可以规划出一条最优路径,同时配合激光雷达和深度相机以及路径规划的算法,能够完成对障碍物的躲避任务即自主避障功能,从而达到自主导航到达设置的目的位置完成井下自主巡航的工作任务。
猜你喜欢
北京测绘(2022年5期)2022-11-22
快乐学习报·教育周刊(2022年16期)2022-05-01
汽车观察(2021年8期)2021-09-01
中学生数理化·七年级数学人教版(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
福建基础教育研究(2019年6期)2019-05-28
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26