
三轴六自由度随机振动试验转换矩阵原理及控制方法
2022-07-26 01:33郑荣慧陈国平孙建勇陈怀海
振动工程学报 2022年3期
郑荣慧,徐 俊,陈国平,孙建勇,陈怀海
(1.南京航空航天大学机械结构力学及控制国家重点实验室,江苏南京 210016;2.中国航空综合技术研究所,北京 100028)
1 概述
三轴六自由度随机振动试验是一种先进的振动环境试验方式。不同于传统的方阵或者长方阵振动控制试验,三轴六自由度随机振动试验可以同时实现沿正交轴向的三个线振动以及绕三个正交轴向转动的角振动环境。
三轴六自由度随机振动试验属于多输入多输出随机振动试验,需要使用基本的多输入多输出振动控制理论。考虑到几乎没有可用于宽频带的角加速度传感器,因此,目前角加速度的测量是利用线加速度测量结果通过输入变换矩阵转换而来。三轴六自由度随机振动试验需要使用三轴六自由度振动台系统来实现。图1 展示了美国Hill 空军基地的电动式和美国TEAM 公司的电液式这两种三轴六自由度振动台系统[1-2]。
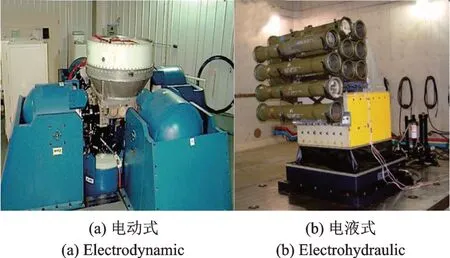
图1 三轴六自由度振动台系统Fig.1 6-DOF vibration shaker system
三轴六自由度随机振动试验控制结果关键在于三轴六自由度振动台系统本身的性能和振动控制技术的优劣。良好的振动台系统具有足够宽的工作频带,并且在各个自由度上能够实现完全解耦。一般来说,电动式振动台具有较宽的工作频带,但其推力较小;电液式振动台工作频带较窄,但其推力较大,能够满足大型车辆、房屋地震等工程振动试验需求[3]。
三轴六自由度的随机振动控制技术是在传统的多输入多输出随机振动控制技术的基础上对信号进行输入输出转换。输入输出概念是针对数据采集与发送测试系统而言,输入信号即为采集至测试系统输入板卡模块的加速度测量信号,输出信号即为从测试系统中输出板卡模块输出的驱动电压信号。因此,输入信号变换即将采集得到的线加速度响应变换为六个自由度上的振动响应;输出信号变换即将六个自由度上的驱动力变换为实际激振器所需要的驱动信号。Norman 等[4]讨论了输入信号变换方法,并指出至少需要3 个三轴向加速度传感器,并且它们不能布置在同一条直线上。Russe11 等[5]研究了四种六自由度激振器配置方式,并给出了输入输出转换控制方式和传统方阵控制方式分别适用的情形。
严侠等[6]对三轴六自由度液压振动台随机振动控制进行了分析与仿真,其自谱控制结果均在预设的±3 dB 容差限内。韩伟等[7]针对三轴六自由度闭环虚拟随机振动试验系统进行了建模与仿真,仿真结果表明所建立的模型准确,可对实物试验前的随机振动试验控制方案进行优化。然而,这两种仿真分析均未考虑互谱的影响。理论上,三轴六自由度随机振动控制试验需要同时控制六个自谱,即三个线加速度功率谱和三个角加速度功率谱,以及30 个互功率谱。这30 个互谱的控制可以转化为对15 个相位差和15 个相干系数的控制,因为互谱可以用自谱、相干系数和相位差表示。
在控制算法方面,现有国外控制器中的控制算法是封闭的,用户只能按照步骤通过输入一些必要参数来完成三轴六自由度振动控制试验。同时,三轴六自由度振动台系统构造较为复杂,并且价格昂贵。因此,本文旨在从理论上对三轴六自由度振动控制的基本原理与核心算法进行研究,进一步阐明其控制算法与实现原理。本文首先推导了输入输出转换矩阵,然后给出了三轴六自由度随机振动控制方法的一般步骤。紧接着,讨论了两种振动台系统的激振器配置方式以及一些传感器的布置方式。第6 节给出了一个三轴六自由度振动控制仿真算例。
2 输入转换矩阵
首先分析六自由度振动系统的加速度特征,建立采集的线振动加速度与六自由度振动加速度之间的关系,最后通过合理的简化假设得到输入转换矩阵的一般表达式。
考虑如图2所示的振动系统,其中固定参考系连接大地,动系连接振动台并随着时间发生运动。设点P为结构上任意一点,点P′为结构发生弹性变形后点P的位置。点P的绝对位移矢量可以表示为:


图2 六自由度振动系统加速度分析Fig.2 Acceleration analysis for 6-DOF vibration system
式中up为点P的绝对运动位移矢量,ub为动系的运动位移矢量,rp为点P在动系中的运动位移矢量。三者可以表示为:

式中 “-”表示矢量在坐标系里的向量表示,q0和q分别为惯性系和动系的基坐标矩阵。这里需要注意的是,动系的基坐标矩阵q是时间的函数。两个坐标系基向量矩阵通过欧拉旋转角矩阵表示为如下关系:

式中Q为欧拉旋转角矩阵。
对点P的绝对位移求一次导数可以得到绝对速度,表示为:

式中 “·”表示对矢量关于时间求导数。ω为动系的角速度矢量。
再对速度求一次导数,则点P的绝对加速度可以表示为:

式中α为动系的角加速度矢量,为点P的绝对加速度,为动系的线加速度,为相对加速度,为科氏加速度,α×rp为切向加速度,ω×(ω×rp)为法向加速度。
对于六自由度振动控制,传感器一般布置在振动台体上,控制台体的六个刚体自由度。因此,若传感器布置在台面上,且假设台面为绝对刚性,则有:

考虑到大多数随机振动试验中,结构的法向角速度相对很小以至于可以忽略,因此,公式(6)可以进一步简化为:

将式(2)和(3)代入式(7)中,则有:

考虑到振动试验中台体的转角很小(通常小于5°),即:

因此,将式(8)中的矢量用矩阵形式表示,并用a表示加速度,点P的绝对加速度可以写为:

其中,
若在振动台上布置n个三轴向传感器,并将式(10)整理后有:
式中ex,ey和ez分别为坐标系三个轴向上的单位向量。根据上式,有:

式中 输入转换矩阵定义为:

式中 pinv(·)表示对矩阵取伪逆。上标‘T’表示对矩阵取转置。
3 输出转换矩阵
本节分析六自由度振动系统运动所需的六个合力与激振器实际所需施加激振力之间的关系,并推导得到输出转换矩阵的一般表达式。
图3 给出了振动台系统受到m个激振器作用的示意图,其中坐标系原点位于振动台的质心处。施加在振动台体质心上的合力F1可以表示为:
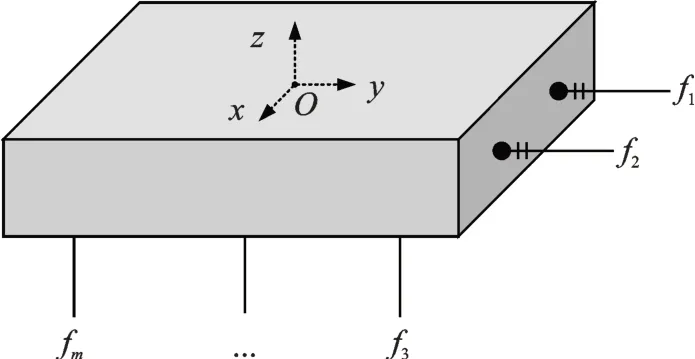
图3 振动台系统受力示意图Fig.3 Sketch map for vibration shaker subjected to input forces

式中υ表示单位方向矢量,f为激振器施加在振动台上的力。
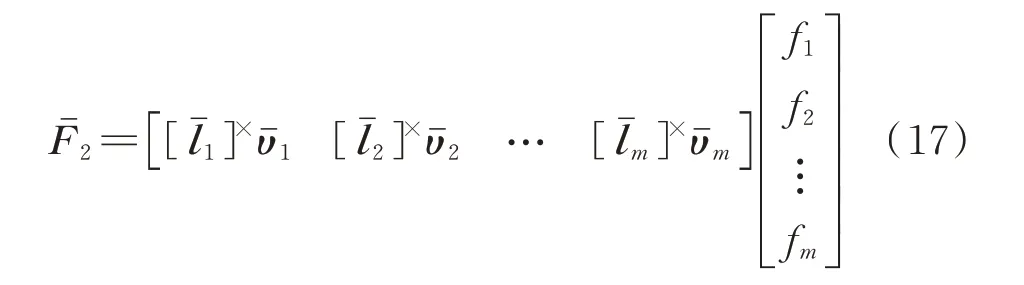
施加振动台体质心上的合力矩F2可以表示为:

式中l为力臂矢量。将向量积用矩阵形式表示,则可以写为:
将式(15)和(17)合并,有:

上式可写为:

若实际想要控制的自由度数为d(d≤6,d为整数),则上式写为:

式中T2为行满秩矩阵,因此,有:

进一步地:

因此,输出转换矩阵定义为:

此外,定义配置矩阵为:

4 振动控制方法
三轴六自由度随机振动试验的目的是使得控制自由度的响应谱密度Syy等于预设的参考谱密度Srr。在每一根谱线处可以表示为:

参考谱密度矩阵为一个6×6 的正定厄米矩阵,对角线元素为正实数,表示自谱密度,非对角线元素为虚数,表示互谱密度。自谱密度代表了控制通道振动量级大小,互谱密度代表了通道之间的相关性。值得注意的是,这里的谱密度矩阵是三维矩阵,其第三个维度是频率。
驱动傅里叶谱矩阵可以表示为:

式中Z为频率响应函数矩阵的逆阵,且该矩阵在振动控制前获得。Θ为随机相位矩阵,L为谱矩阵做乔里斯基分解得到的下三角矩阵。在首次驱动生成时,L为从参考谱矩阵中获取,表示为:

式中 上标‘H’表示对矩阵取复共轭转置。对矩阵X作傅里叶逆变换即可得到多输入时域驱动信号。控制点处的加速度传感器采集到的响应信号需要通过输入转换矩阵进行变换,表示为:

对转换后的响应时域信号做功率谱密度估计。由于计算误差、噪声干扰等影响,控制点处的响应谱密度往往不能贴合在参考值附近,特别是在共振峰处常常出现谱线超标现象。此时,在闭环均衡过程中需要利用控制算法对驱动信号进行修正,矩阵幂次控制算法可以表示为[8]:

式中Ly为当前响应谱密度做乔里斯基分解得到的下三角矩阵;Lold为上一次均衡过程中的下三角矩阵;Lnew用于更新式(26)中的下三角矩阵L,也就更新了驱动信号;η为收敛因子。
5 讨论
5.1 激振器配置
电动式六自由度振动台系统常见的八个激振器配置方案如图4,5所示。下面计算这两种情形下的输出转换矩阵。假设振动台面呈正方形并且边长为2l。以配置方式一为例,根据第3 节中的推导,激振器施加在振动台上力的单位方向向量分别为各个力对应的力臂向量分别为

图4 八个激振器配置方式一Fig.4 Eight shakers configuration mode 1
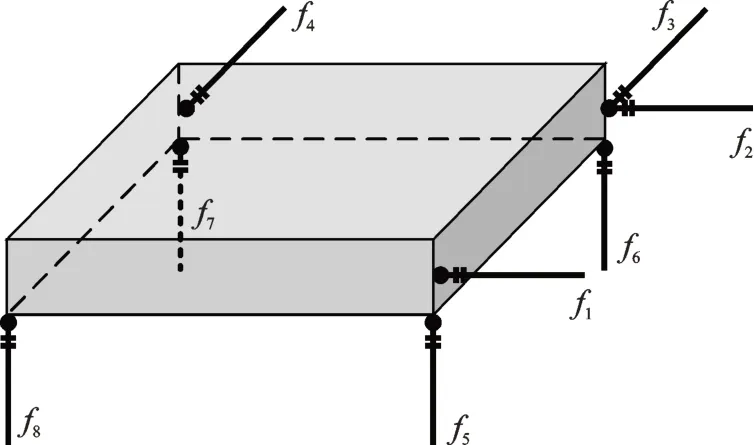
图5 八个激振器配置方式二Fig.5 Eight shakers configuration mode 2
根据式(18),可以得到:
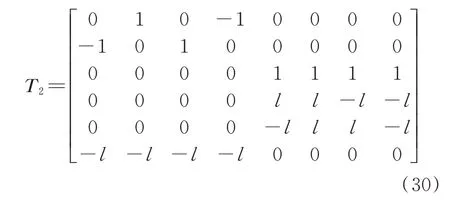
那么输出转换矩阵就可以由式(23)得到。同样地可以得到配置方式二的T2矩阵,即:
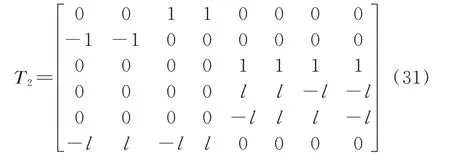
此外,可以发现两者的配置矩阵是一致的,即为:
该矩阵可以体现出激振器的配置方式,比如在x轴平动方向有两个激振器同时提供此方向上所需的驱动力。
5.2 传感器布置
对于三轴六自由度振动测试来说,被测对象一般安装在振动台面的中心位置,三轴向传感器布置在振动台面的四周,如图6所示,这样可以较好地测量到转动加速度的贡献。根据第2 节中的推导,该坐标系建立在台面中心位置,四个加速度传感器的坐标分别为(l,l,0),(-l,l,0),(-l,-l,0)和(l,-l,0)。
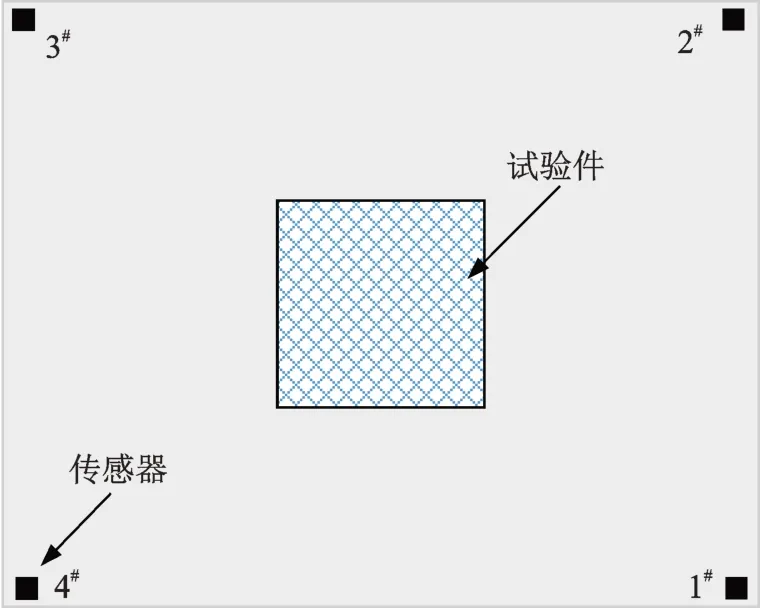
图6 加速度传感器布置Fig.6 Acceleration sensors configuration
根据式(12),可以得到:
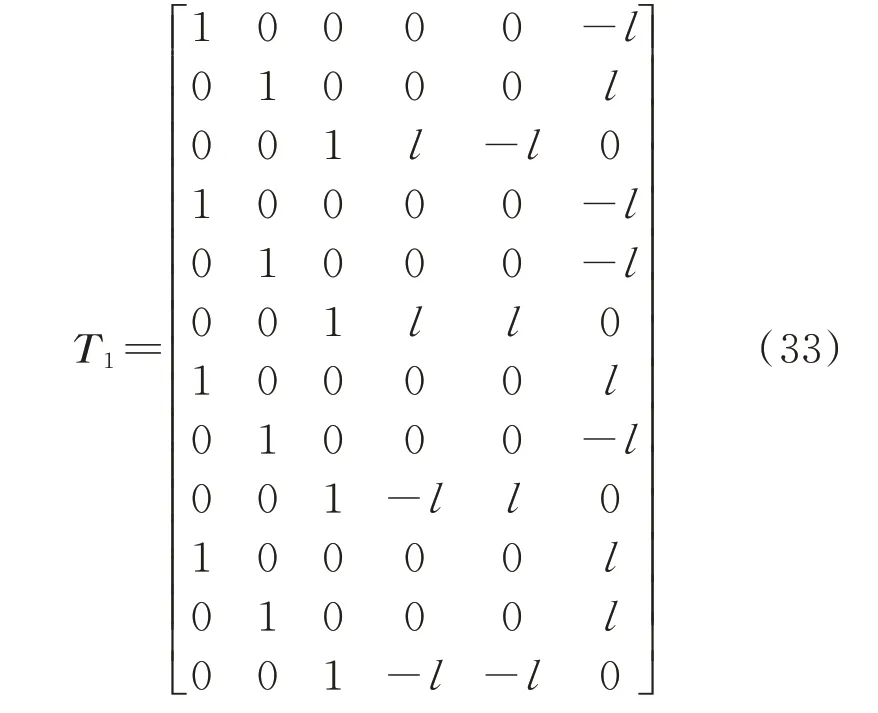
因此,输入转换矩阵可以通过式(13)得到。
文献[9]讨论了传感器布置对测量结果的影响,并且表明,当输入转换矩阵的条件数最小时,噪声扰动对测量结果产生的影响最小。输入转换矩阵的条件数最小这个条件对应着传感器呈正多边形布置。另外,若在试验频带内,振动台体发生弹性变形,将对测试结果有一定的影响。
6 算例
本节给出一个三轴六自由度振动试验控制仿真算例。振动台模型如图4所示,八个激振器简化为同样的弹簧阻尼系统,其中刚度和阻尼系数分别为4.5×109N/m,1×104kg/s。振动台的长宽高分别为0.8,0.8 和0.1 m,质量密度为2660 kg/m3。四个三轴向加速度控制传感器布置如图6所示。计算可得仿真的振动台系统第一阶固有频率约为1157 Hz,因此设置仿真试验中控制频带为20~1000 Hz。
六个自由度的参考自谱及控制自谱如图7所示,可以看出控制效果令人满意。在参考互谱设置中,仅设置第1 和第5 自由度之间存在相干性,相干系数为0.5,相位差为π/6,其他自由度之间相干性为0。控制的互谱密度如图8所示,其控制效果同样令人满意。
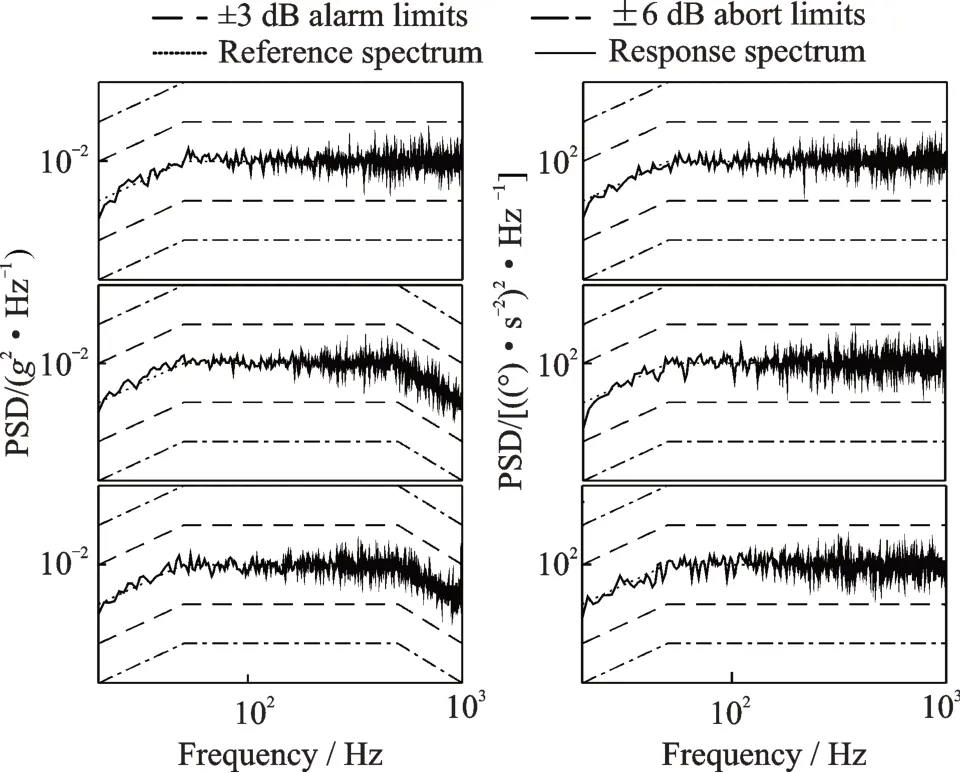
图7 控制的六自由度响应自谱密度Fig.7 Controlled response auto spectral densities of 6-DOF

图8 控制的第1 和第5 自由度之间的响应互谱Fig.8 Controlled response cross spectral densities between the first and fifth degree of freedom
7 结论
三轴六自由度振动试验是当前力学振动环境试验的主要发展方向之一。先进的六自由度振动台系统构造复杂且造价昂贵。本文从理论上对当前先进的三轴六自由度随机振动试验及其控制方法进行了推导与分析。本文的工作总结如下:
(1)推导了三轴六自由度振动系统的加速度关系,得到了输入转换矩阵的一般表达式;
(2)对振动台体进行了受力分析,得到了输出转换矩阵的一般表达式;
(3)给出了三轴六自由度随机振动试验控制方法的一般步骤;
(4)对两种八个振动台配置的三轴六自由度振动台系统以及传感器布置方案进行了讨论。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
科教导刊·电子版(2021年26期)2021-11-29
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
科技创新与应用(2018年2期)2018-01-19
中国科技纵横(2017年18期)2017-10-25
农机使用与维修(2017年10期)2017-10-21
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
军民两用技术与产品(2015年23期)2015-01-08
