基于高斯混合概率假设密度的运动参数估计组合平滑滤波算法
2022-07-27 09:17黄庆东李晓瑞曹艺苑
电子与信息学报 2022年7期
黄庆东 李晓瑞 曹艺苑 刘 青
①(西安邮电大学通信与信息工程学院 西安 710121)
②(西安理工大学自动化与信息工程学院 西安 710048)
1 引言
高斯混合概率假设密度(Gaussian Mixture Probability Hypothesis Density, GM-PHD)滤波方法通常预设速度与目标的真实速度相接近时,才能表现出良好的跟踪性能,但实际情况下,速度如果未知或与真实差异较大会导致状态参数不匹配,状态估计不准确[1–6]。采用现有的跟踪算法对模型中速度未知的目标进行跟踪,无法获得可靠的跟踪效果。所以为了提高跟踪精度,有必要对速度信息进行实时估计以及准确的提取。
对此,文献[7]提出了一种分段解析迭代的速度预测方法,用于解决对速度变化规律的简化建模来对剩余航程进行修正,虽然有一定的实时性但仍然要预设一个真实初始速度的数值。文献[8]提出了一种速度未知条件下的定位算法,该定位算法利用传感器组成的非线性定位方程组计算出速度,获得定位结果。但该算法的精度受时间差的精度影响。文献[9,10]提出了一种角度测量的目标运动参数估计和跟踪的算法,依据运动参数估计值和角度测量值的关系实现速度运动参数估计。但该算法没有对估计的速度与系统状态估计结合,没有进行实时状态估计与速度估计嵌套处理,进而影响目标的定位精度。
本文针对未知速度的目标跟踪问题,提出了一种基于GM-PHD滤波的运动参数组合平滑滤波算法,具有实时性和准确性。由于GM-PHD滤波得到的位置信息稳定可靠,因此在速度不确定情况下,依据位置信息的时间差分,得到速度的估计值,但此速度受系统误差和随机性偏差影响有很大的抖动,对初步速度估计值进行5点中值滤波和3点线性平滑的组合平滑滤波,去除随机跳变数据并抑制噪声波动影响,使估计的速度值更加接近真实速度。通过速度准确性的提高,能够提供更精确的运动模型,提升GM-PHD状态估计环节的准确性,进一步提高状态估计的准确性。
2 标准的GM-PHD滤波器
GM-PHD滤波器具有计算量小、目标状态提取简单等优点,因此为简便起见,假设所研究的系统符合线性高斯的条件。在不考虑衍生目标的情况下,GM-PHD滤波器的实现过程如下[11–13]:


3 基于GM-PHD滤波器的运动参数估计组合平滑算法
在高斯假设条件下,GM-PHD滤波器是贝叶斯统计最优的近似实现[14],其近似主要是更新环节为了避免目标数量无限扩张所进行的裁剪[15]。运动目标参数未知或不准确会影响GM-PHD滤波器预测环节的准确性,进而导致最终更新结果与实际有较大偏差。如果能够获取较准确的运动参数信息提供给GM-PHD滤波器则可以减小估计偏差。本文通过GM-PHD状态估计初步获取速度信息,然后进行平滑滤波去除随机跳变数据和噪声波动影响,逐步迭代实现速度更新和状态更新。
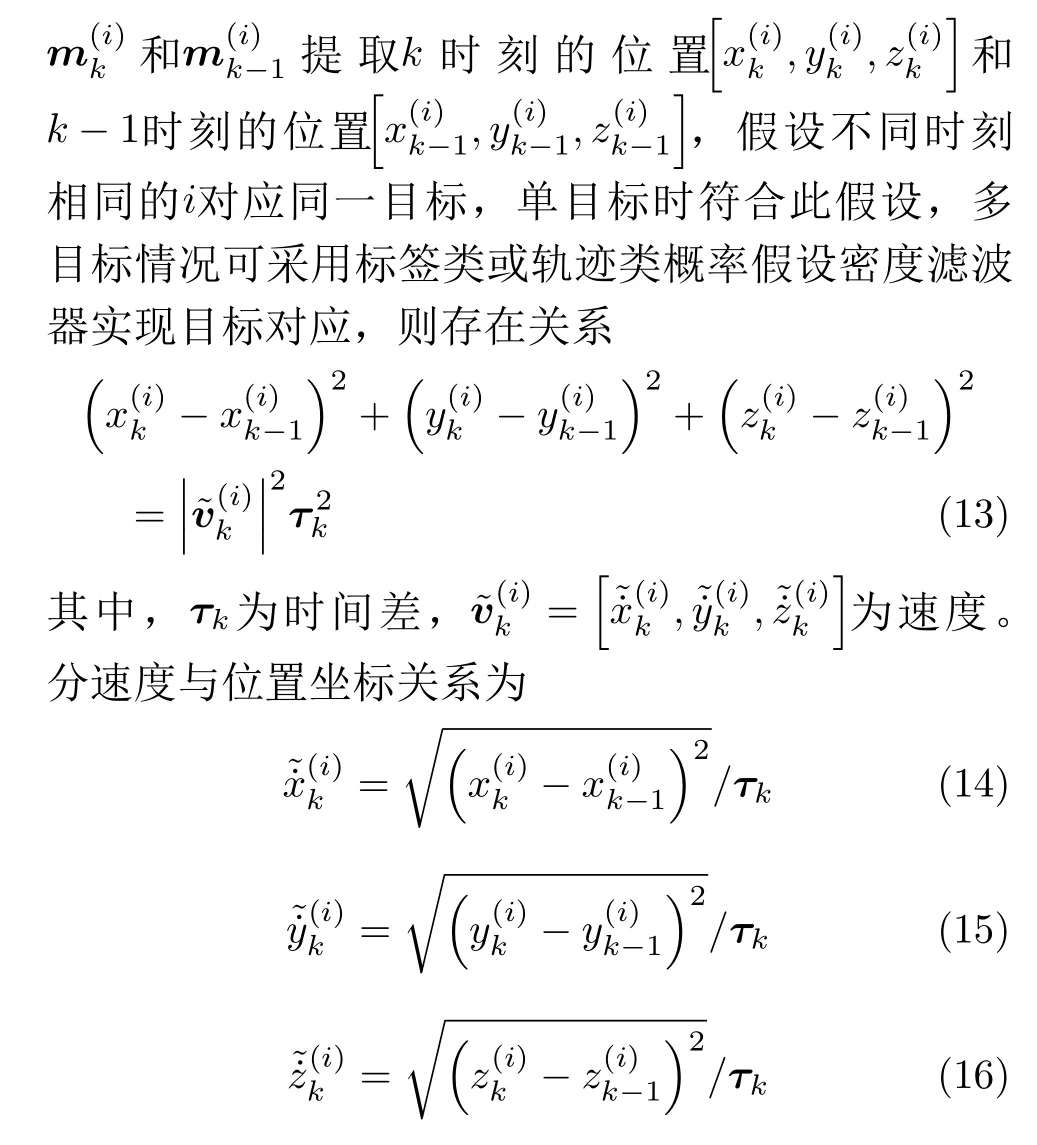
3.1 速度初步获取

3.2 运动参数组合平滑


中值滤波能够保留速度信息的阶跃性变化,同时有效去除少量的“跳变”;而线性平滑能够对数据进一步进行平滑修正。中值滤波和平滑窗长不宜过大,否则会对速度变化不敏感以及时延加大。平滑窗长增加可以提高平滑效果但会导致两平滑段之间模糊程度加重。中值滤波与线性平滑组合使用可以克服中值滤波平滑效果差和线性平滑对随机跳变“野点”无法去除的缺点,获得更好的平滑效果。对于平滑滤波的详细内容可参阅文献[16–19]。本文利用2次平滑的算法,并将此结果反馈给GM-PHD滤波器作为速度参数使用。算法实现流程见表1。

表1 基于GM-PHD滤波器运动参数估计组合平滑算法

图1 基于GM-PHD滤波器的运动参数估计组合平滑算法示意图
4 仿真结果与分析
4.1 仿真场景描述


4.2 仿真
本文z方向速度设置为0,因此只考虑x,y平面上的运动,图2中x,y方向的红色实线的目标真实轨迹分别被“·”代表的目标的位置估计值覆盖。图2中灰色“× ”为杂波和目标量测值。图2采用组合平滑GM-PHD算法在速度未知情况下对目标状态进行估计,由图可知目标跟踪状态良好,说明算法具有良好的稳定性。

图2 目标跟踪图
图3展示了目标x,y方向速度的估计。由图3可以看出,组合平滑算法处理后速度波动比初步获取速度小,且更接近真实速度值。平滑前初步获取x方向速度方差为2.6102;组合平滑后方差为0.4244。平滑前初步获取y方向速度方差为1.5718;经过组合平滑后方差为0.3679。因此相比平滑前速度,组合平滑后数值更稳定且更接近红色实线表示的真实速度。

图3 目标的速度估计

表2 实验参数设置
从图4(a)、图4(b)和图4(e)可看出,在速度平稳阶段(水平红线),估计速度在预设速度(红线)附近保持相对稳定跟随;更为明显的是在100和200时间步,速度发生跳变时,各图速度保持稳定的跟随趋势,进行持续稳定跟随。同时图5中OSPA性能随时间推移整体保持稳定趋势,没有出现明显波动,说明逐步迭代实现速度更新和状态更新是持续有效进行的。

图4 组合平滑中间过程对比图


图6对比了本文算法与其他算法的目标个数估计情况,由图6可知“(组合平滑)本文算法”与“速度已知GM-PHD”表现相当,估计性能最好。图5对比了本文算法与其他算法在100次蒙特卡罗重复实验统计情况下,OSPA随时间变化的统计平均值。由图5可知,对于不同时刻下的OSPA距离,“速度未知GM-PHD”性能最差,其他3种方法均优于速度未知情况;“(平滑前)本文算法”波动接近于采用预设速度的“速度已知GM-PHD”算法,稳定性稍好,整体性能略好。“(组合平滑)本文算法”波动最小,稳定性最好,同时整体更接近0值,性能最好。

表3 不同过程噪声下算法的平均OSPA距离
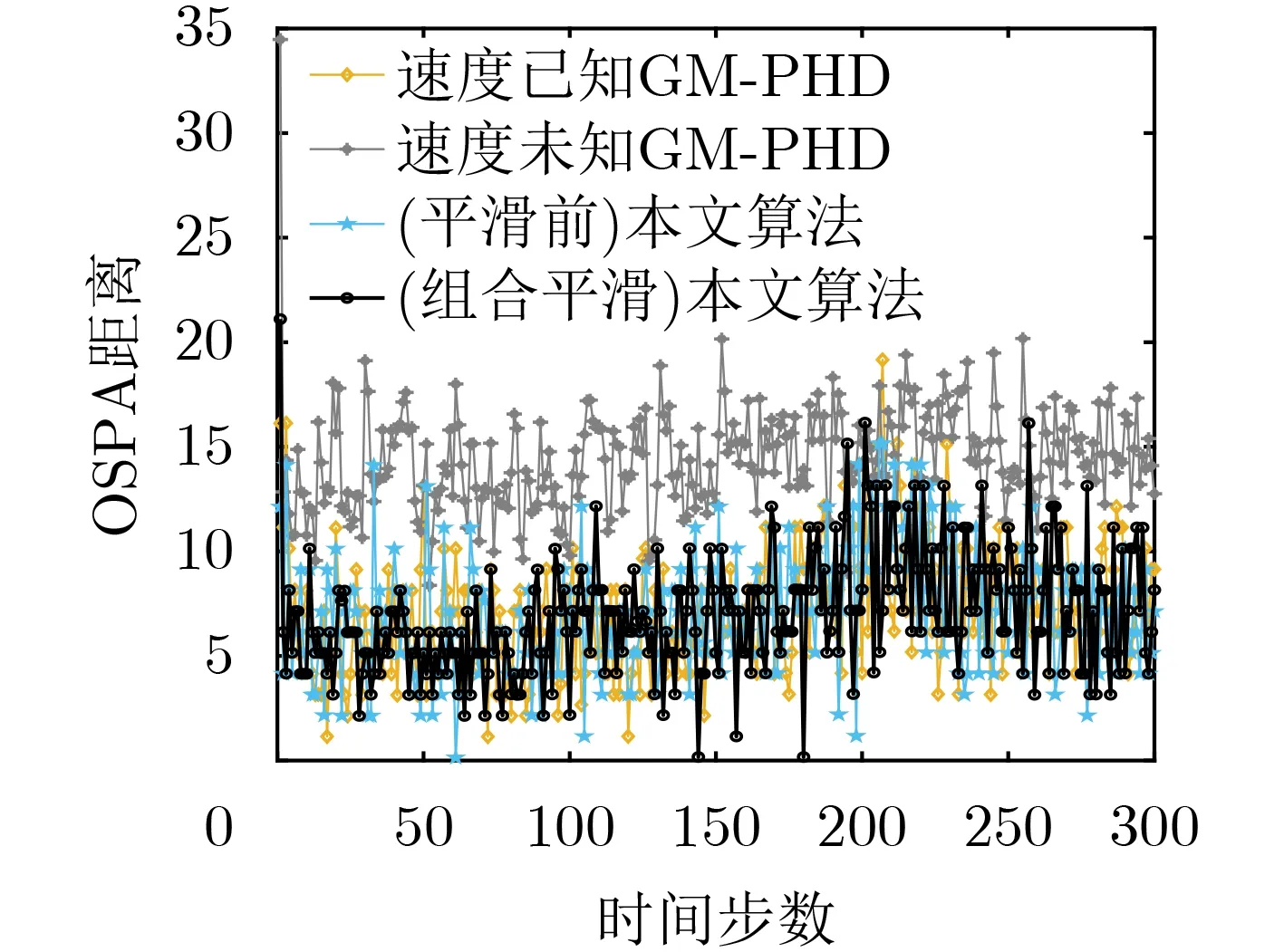
图5 OSPA距离
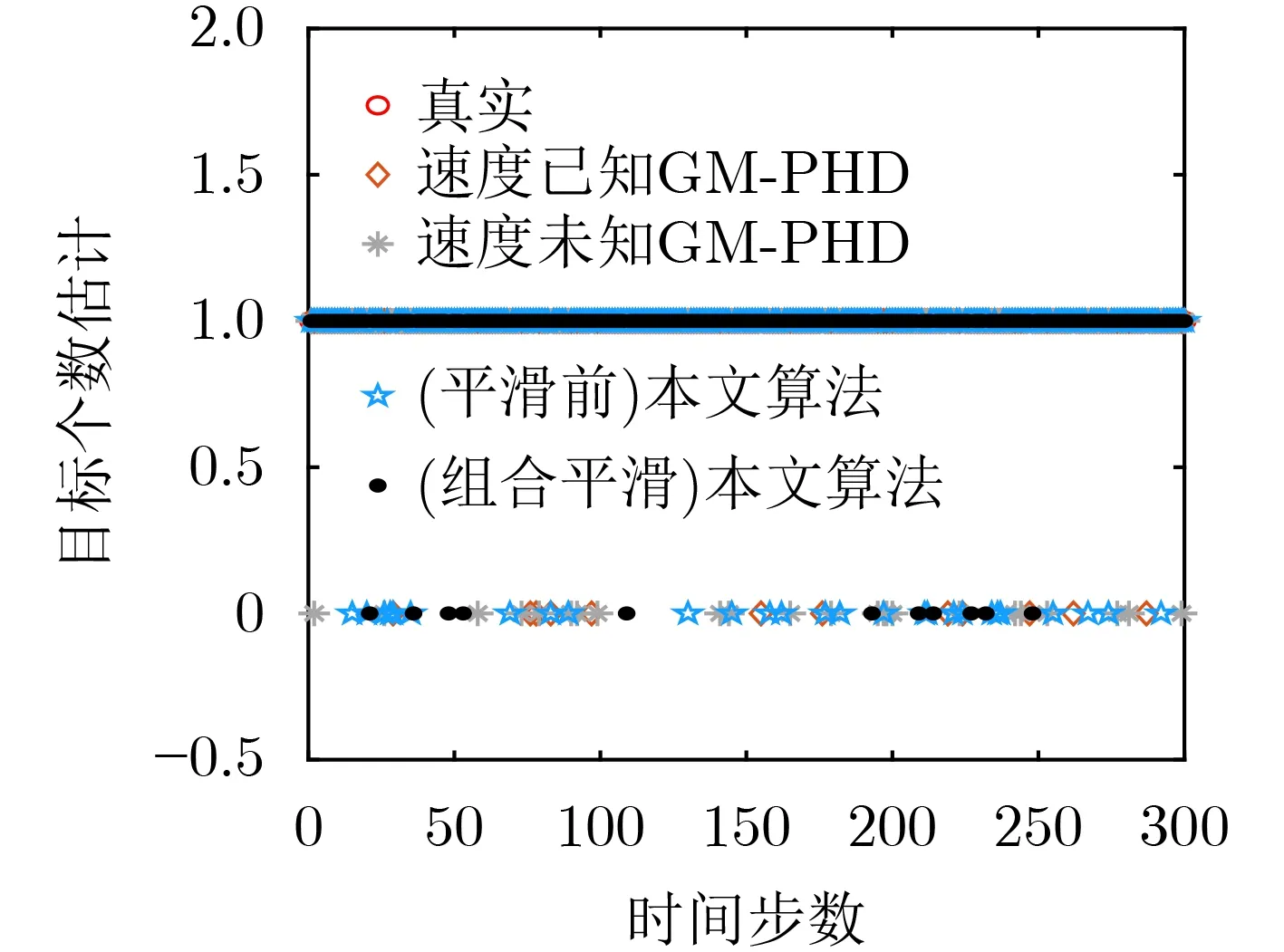
图6 目标估计个数
通过上述实验对比验证了“(组合平滑)本文算法”的有效性,整体性能会好于预设速度已知情况下的GM-PHD滤波器性能,算法简单容易实施,可以和各种类型PHD结合和推广。
5 结论
本文提出一种未知参数目标跟踪、估计方法。在速度未知情况下,采用基于贝叶斯统计最优理论的GM-PHD滤波估计获得的更精确的位置状态信息计算得到的实时速度信息估计,另外又进一步通过对临近几个时刻计算得到的速度信息进行组合平滑滤波处理,更进一步改善了系统引入的误差和随机性偏差的影响,提高速度估计准确性,将估计速度代入GM-PHD滤波的目标速度参数中,用于提升目标个数和位置的估计精度。仿真实验表明,本文算法对速度未知情况下的目标跟踪可以达到良好的效果,性能优于直接利用真实速度的GM-PHD方法。本文为了简单并重点突出参数估计,只进行了单目标的运动参数估计,对于多目标情形,可以采用标签滤波器或者轨迹滤波器进行目标区分和速度估计,进而很容易和本文方法结合,推广到多目标滤波器中使用;同时对于应用广泛的卡尔曼滤波器,本文方法也很容易结合使用,改善性能。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
建材发展导向(2021年10期)2021-07-16
新世纪智能(语文备考)(2021年11期)2021-03-08
北京航空航天大学学报(2020年10期)2020-11-14
中国惯性技术学报(2019年3期)2019-10-15
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
中国公路(2017年11期)2017-07-31
智富时代(2017年4期)2017-04-27