
轨道装备用无损检测爬壁机器人的设计与实现
2022-07-29 03:20肖敬伟
北京工业职业技术学院学报 2022年3期
肖敬伟
(长春职业技术学院,长春130022)
0 引言
广泛使用于化工设备中的压力容器在生产和运输过程中多以罐体为主,由于罐体长期处于腐蚀、低温或高压的工作环境中,易出现罐壁开裂、劣化、蠕变和疲劳断裂等。如何对压力容器进行快速检测和清洗,是摆在化工工作人员面前的一道难题。目前压力容器检测和清洗多以“人工为主、机器为辅”,随着科技进步和经济发展,“机器为主、人工为辅”将得以实现。国内学者在这一领域钻研多年,其中卢盛欣等[1]基于风力电塔设计一款小型爬壁检测机器人;李志等[2]针对储油罐存在管壁检测和测量难题,采用四自由度吸附式爬壁人以此来解决缺陷;李静等[3]针对锅炉壁厚采用多级控制方式,提高了检测效率,实现了吸附式检测和监控。当爬壁机器人在工作过程中履带会与壁体直接接触,对于一些特殊的内径存在达不到精确检测的问题。
因此,针对大型石油罐罐底与罐壁缺陷的在油检测问题,笔者设计一种可爬直角壁的四轮四轴液压驱动式磁力吸附爬壁机器人。该机器人可在石油罐内实现罐底与罐壁间的双向直角过渡攀爬、90°转向及工作间隙调节等动作。同时,为了保证运动稳定性能,设计多组吸附单元作为吸附机构,采用无刷电机为双同步带供电,机器人运动过程中的灵活性和速度得到了提高;其中笔者对同步带式移动越障机构进行了创新设计,大大增加了机器人的越障能力,提高了实用性。
1 总体方案设计
爬壁机器人总体尺寸为650mm×600mm×200mm,装配体模型如图1所示。
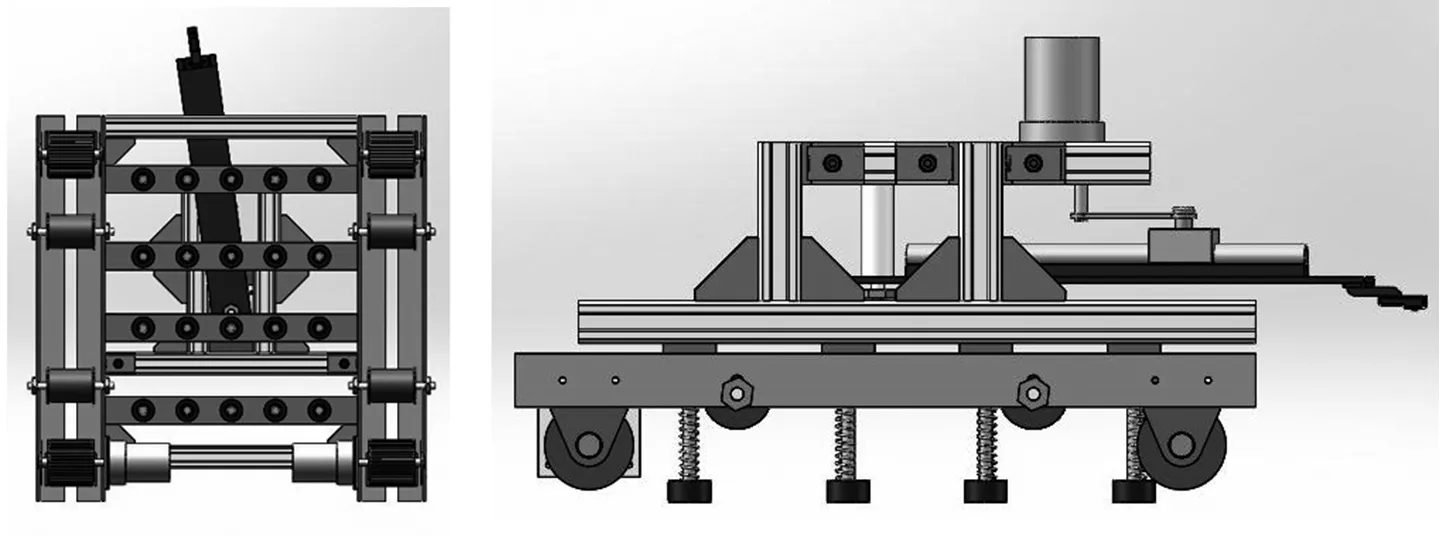
(a)俯视图 (b)侧视图图1 无损检测爬壁机器人装配体模型
机器人向前移动的同时要进行焊缝检测和缺陷打标,机器人移动速度暂定为1 m/min。设计性能指标:最大尺寸要求≤650mm×600mm×200mm;本体自身质量≤5 kg;负载能力≤10 kg;移动速度1~2 m/min;运动角度误差≤0.5°;越障能力≥10 mm。
2 爬壁机器人结构设计
2.1 车体结构设计
车体下方两侧各置有同步带,由无刷电机驱动,车体的速度和方向可以通过调节电机速度来控制,当车体在平缓表面直线运动时,同步带上方的2个光滑轮下移压迫同步带使带面张紧[4]。当车体需要进行转向运动时,2轮缓慢上升,带面由张紧状态变为松弛状态,通过2组可以改变直径的齿轮或者皮带轮来控制无调电机驱动的变速比[5]。
2.2 电机选型
爬壁机器人主要由同步带、吸附装置、电机减速器和型材等构成[6]。由于无刷电机内自带减速装置,不需再挑选减速器与其搭配。假定电机经减速器装置作用后的效率为η,则减速器的输出转矩和输出功率
Mr=iηMd≥MQ
(1)
(2)
式(1)和式(2)中,i为传动比;Md为电机的转矩;PQ,MQ分别为经计算得出的驱动带轮所需的功率和转矩;n为减速装置的输出速度,取n=15 r/min。
把数值代入式(2)、式(1),得出:
Pr=15 W≥PQ=12.964 W
Mr=13.265 N·m≥MQ=11.783 N·m
因此,该爬壁机器人电机所选功率为15 W24 V的无刷电机,经计算可以满足爬壁所需的动力要求。
2.3 同步带设计选择
同步带外层为氯丁橡胶的环形带状,内层有钢丝和纤维构成。由于传输履带为环状,带沟槽、履带最外层承载力较小,且不打滑、张力小,故带与带轮之间为相对滑动构成同步传动[7]。按照同步传动带标准进行设计计算,同步带功率
Pd=k0P=1.3×0.014=17.1 W
(3)
式(3)中,k0为载荷修正系数,取k0=1.3 ;P为单侧需要传递的功率,取P=14 W。
为了简化计算过程,对所选的同步带进行抗拉强度校核计算时做如下假设:
(1)同步带为刚体;
(2)同步带带齿与轮齿在不打滑的情况下,带轮停转,带的伸长量达到最大值,这样保证了同步带张紧端达到拉应力的最大值;
(3)同步带与带轮啮合处,恰好为同步带入弯点,这样保证轮齿给带齿的剪切应力方向应为沿同步带的平面,即拉应力方向,通过分析可知,同步带齿受到的作用力是轮齿给带齿的剪切力
F1=Mr/d1=123.21 N
(4)
式(4)中,d1为同步带轮直径。
剪切力使同步带受到横向拉应力,通过计算分析得知:该同步带所受到的总拉力小于该同步带的许用拉应力,则表示该同步带在正常工作中,不会出现断裂现象。
2.4 爬壁机器人吸盘设计
车轮式结构移动速度快、控制灵活,尤其转向比较容易实现,但车轮与壁面接触面积小,因而维持一定的吸附力较困难;同步带式结构对壁面的适应性强,接触面积大,吸附力强,运动速度较快,但不易转向和壁面过渡[8];多足步行式吸附力较强,易于跨越障碍,可灵活实现壁面过渡和转向等功能,但移动速度慢,各足的运动协调性要求较高,控制难度高[9];框架式结构利用多层框架的交替运动来实现机器人本体的整体移动,虽然控制比较简单、吸附力强,但运动速度较慢,转向和壁面过渡能力有限。
笔者设计了多组吸附单元作为吸附机构,所提供的吸附力远大于相同规格下1组吸附单元提供的吸附力,保证了运动的稳定性。在确保运动稳定性的前提下,采用无刷电机为双同步带供电,具有很强的灵活性,所设计的同步带移动越障机构,使爬壁机器人的越障能力大为提升,提高了实用性[10]。该吸盘机构主要由可变磁力吸附装置构成,具有体积小、吸附力高和稳定等优点。在爬壁机器人上安装20个直径为φ30 mm、厚度为15 mm的圆形小磁铁,使其均布在底盘上,并且不能与壁面接触,通过电流来控制磁场效应,此外还增加了可调节吸盘来控制壁面间隙控制吸附作用,再由弹性运动机构实现高气密性吸附。
3 力学特性分析
3.1 静力学分析
在机器人工作壁面与水平面之间夹角呈锐角(0°<α<90°)的状态下进行受力分析,如图2所示。
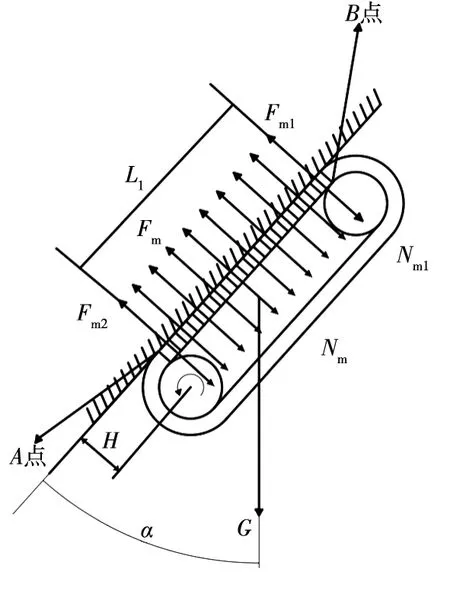
图2 爬壁机器人吸附在工作壁面的力学分析
图2中,L1为爬壁机器人中心距;Fm为爬壁机器人整体最大吸附力;Fm1为单个吸附磁块对壁面的吸附力;Fm2为侧面吸附磁铁最大吸附力;Nm为壁面对机器人吸附力;Nm1为壁面对机器人1个吸附磁块的支持力;H为爬壁机器人工作面与轮之间的中心距离;α为爬壁机器人工作时最大有效工作爬壁角度。
假设电机提供了足够的制动力使机器人可以静止在工作壁面上,要阻止机器人沿着工作壁面下滑,需要机器人与壁面间的最大静摩擦力大于机器人及其负载的重力分量。根据图2可以得出
(5)
由式(5)推出
(6)
式(5)和式(6)中,Ni为壁面对机器人1个吸附磁块的支持力,Ni=60 N;μmax为壁面与吸附磁块之间的静摩擦因数,μmax=0.663~0.748;G为机器人及其负载1/2的重量,G=50 N;α为壁面与垂直方向的倾斜角度,0°<α<90°;Fmi为单个吸附磁块对壁面的吸附力,Fmi=3.6 N ;n′为一侧发挥吸附作用的吸附磁铁的个数,n′=10。
3.2 爬壁机器人向上运动的力学分析
爬壁机器人向上爬行,机器人单侧输出力矩应克服单侧所有吸附磁铁的吸附力和支持力形成的阻力矩以及重力产生的力矩。爬壁机器人向上爬行的示意图如图3所示。
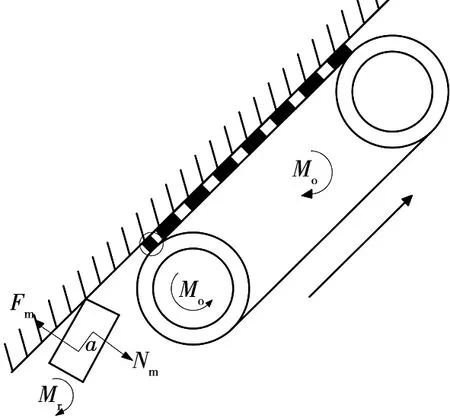
图3 爬壁机器人向上爬行示意图
根据上面分析得出
MQ-Mf-MG=0
(7)
式(7)中,Mf为支持力形成的阻力矩;MG为重力产生的力矩。
根据实际要求,使MQ≥0,即
MQ≥aFm+GHcosα
(8)
式(8)中,a为吸附力和支持力的距离,取其最大值,a=23 mm。
则:MQ≥1 440+4 125cosα,只有当α=0时,所要MQ的最大值为6 Nm。
3.3 爬壁机器人向下运动的力学分析
机器人向下匀速爬行受力情况与向上匀速爬行相似,为防止机器人向下滑落需要1个制动力矩,此时摩擦阻力矩为驱动力矩和电机提供的转矩,重量分量产生的力矩达到力矩平衡。
MQ-MG+Mf=0
(9)
式(8)和式(9)对比,得出向上爬行需要的电机力矩更大。
机器人转弯时驱动力矩为
Mq=2PL
(10)
式(10)中,L为2带轮中心矩,L=280 mm;P为单侧同步带受到的牵引力,P=40 N。计算得:Mq=11.2 N·m
4 爬壁机器人整体运动的控制设计
爬壁机器人的控制主要是通过对无刷电机的控制实现的。将外部接收系统和无刷电机连接,并由24 V锂电池为电机提供直流驱动电流,供其工作。工作人员可通过外部遥控器控制电机,驱动机器人前后左右运动和转向运动。无刷直流电机采用电子换向器,取代了直流电动机的机械换向器。电子换向器装配在功率电路板上,同时在电机本体上配有转子位置传感器,转子位置传感器随时检测转子所在的位置,电子换向器根据转子位置信息决定绕组的通电方向,实现换相功能,如图4所示。
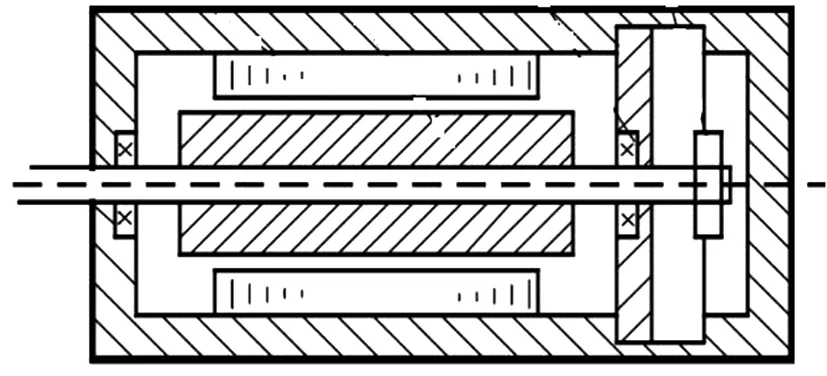
图4 无刷直流电机结构图
无刷直流电机的转子永磁体成对安装在转子上,按照其安装方式不同可以分为2种:(1)凸极式——将瓦片状的永磁体贴于转子外表面,如图5(a)所示;(2)内嵌式——将条状永磁体嵌入转子铁芯中,如图5(b)所示。

(a)凸极式 (b)内嵌式图5 无刷直流电机转子永磁体的安装方式
给无刷电机加上信号接收模块,工作人员通过外部遥控器发送控制信号,改变电机的状态从而改变机器人的行进路线。最后,根据图纸经装配后得到无损检测爬壁机器人的实物图,如图6所示。

(a)俯视图 (b)侧视图图6 无损检测爬壁机器人装配后的实物图
5 结论
为了提高压力容器快速检测、降本增效,笔者设计了一种新型装备用无损检测爬壁机器人。该爬壁机器人主要由履带机构、车体机构和吸附装置3部分组成,使用SolidWords软件对机器人各个零部件进行三维数据建模,分别采用静力学、动力学、运动学对双同步式爬壁机器人进行分析计算,最后结合图纸做出了实物样机。实验证明:该机器人各装置设计合理,由多组吸附单元组成的吸附机构保证了运动的稳定性,采用无刷电机为双同步带供电,使得机器人的运动速度和灵活性得到提高。
猜你喜欢
船海工程(2022年6期)2023-01-02
力学学报(2022年6期)2022-07-10
九江学院学报(自然科学版)(2022年2期)2022-07-02
机电信息(2022年9期)2022-05-07
机械工程师(2022年3期)2022-03-24
计算机仿真(2021年11期)2021-12-10
机电工程(2020年10期)2020-11-04
石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22
电子制作(2019年10期)2019-06-17
应用技术学报(2014年1期)2014-02-28
